Clear Sky Science · zh
突触交响:为仿生机器人腿实现自主运动的显性单突触反射弧的编排
为什么“膝跳”机器人很重要
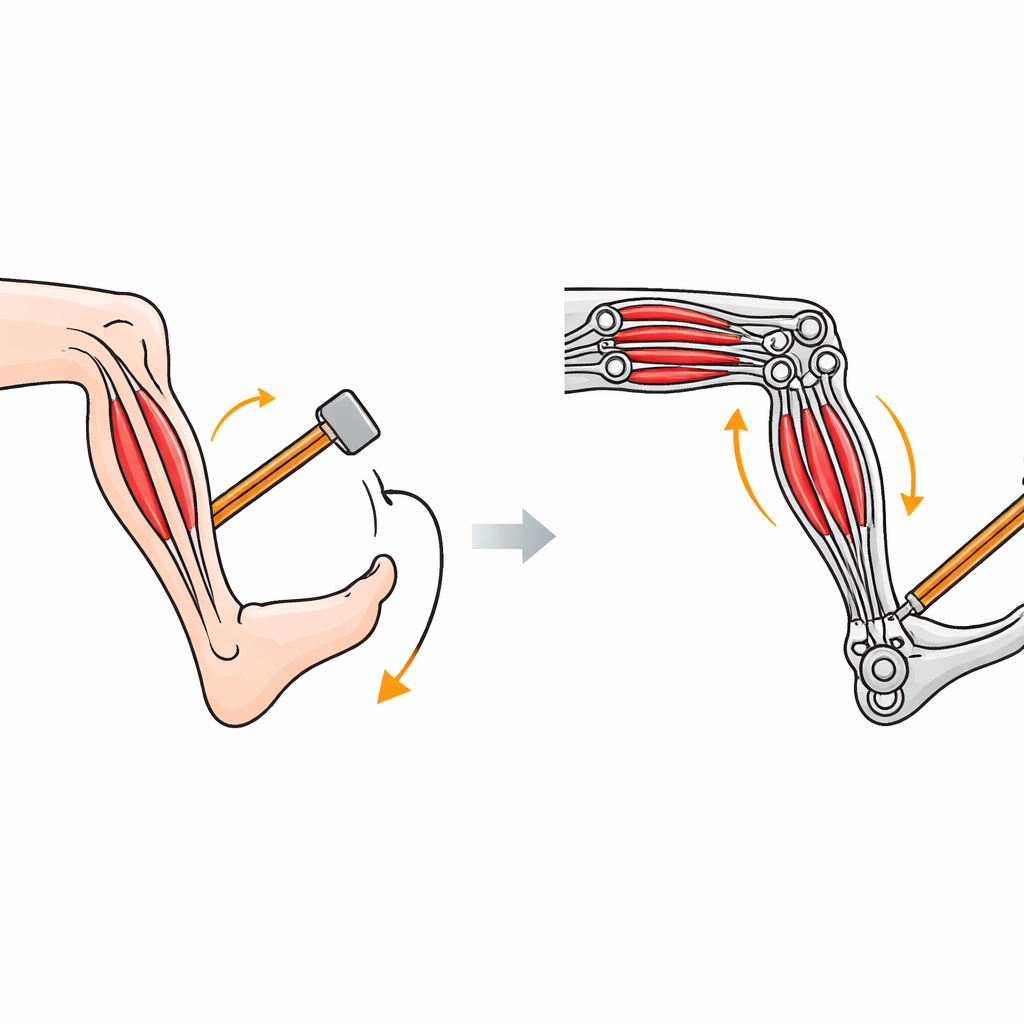
在膝下被轻敲使腿跳动的熟悉反应不只是医生招牌动作——它是人体最快的自动反应之一,帮助我们在地面意外移动时保持直立。本文展示了科学家如何构建出能如此逼真再现膝跳反射的机器人腿:仅凭测量数据几乎无法将其与真人腿区分。这样的突破可能使未来的类人机器人、外骨骼和义肢在日常使用中变得更稳定、反应更快且更舒适。
从软肌肉到栩栩如生的机器人腿
研究团队设计了一条与人体解剖高度一致的右腿:髋部、大腿、髌骨、小腿和具有真实重量与关节行为的足部。研究者没有使用刚性电机,而是采用了四条气动“肌肉”,当充入压缩空气时会缩短,类似生物肌纤维。经过特殊设计的膝关节与髌骨引导保证力与运动像人在体内那样传递,因此即使是髌腱下微小的扰动也会导致人工肌肉出现逼真的拉伸。
像身体一样“听”肌肉
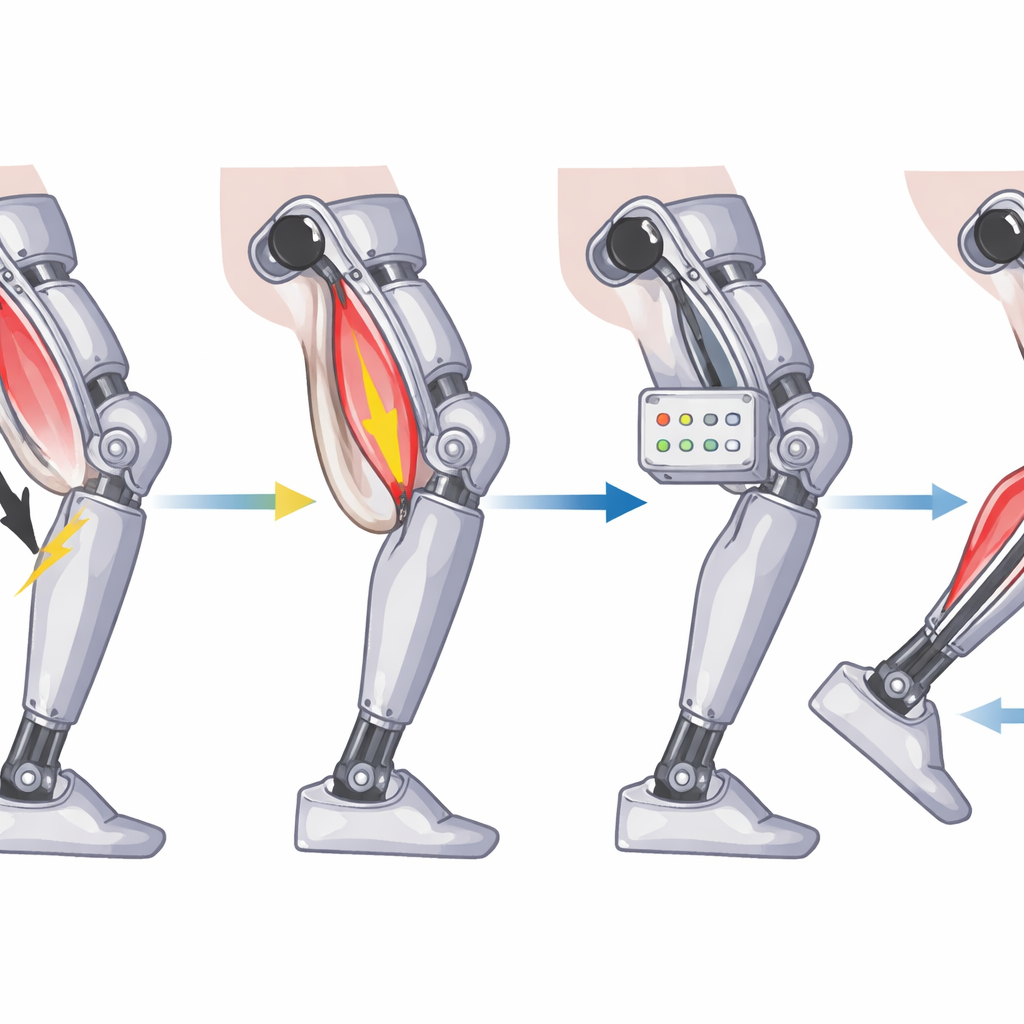
在我们体内,肌肉内的微小传感器检测拉伸及其速度,并通过脊髓中的单突触反射弧以单条通路发送信号,从而触发快速收缩。团队通过在每条人工肌肉内嵌入拉伸传感器来模拟这一路径。当受控的锤击通过肌腱拉伸气动肌肉时,传感器发出电信号到一个简单的控制器,控制器将其转为气压变化。肌肉随即收缩,摆动小腿,正如人在膝跳反射中股四头肌所做的那样。
将机器人与人类置于相同测试
为评估机器人与人的相似程度,科学家对14名志愿者和这条仿生机器人腿进行了相同的实验。在所有情况下,挂在摆上的锤子从多个起始角度敲击肌腱,产生可重复的敲击。对人类,他们用表面电极记录肌肉活动,并用高速相机追踪腿部运动;对机器人,他们记录传感器信号、气压与关节运动。随后比对关键时序:锤子达到最大压入所需时间、首个反射信号出现的速度、腿开始运动的时刻以及膝关节达到峰值角度的时间。
时序、运动与隐含的机械优势
机器人整体的反射模式——膝弯曲的幅度与速度——在所有敲击强度下都落在受试人群的观测范围内。机械事件的时序,从锤击到最大摆动,也与人类数据高度一致,尽管机器人中的电信号传播远快于神经冲动。这种匹配部分来自于腿部精心设计的膝关节与髌骨结构,它们形成了角度依赖的力臂。在接近伸直的膝角时,膝角的微小变化会产生更大的肌肉长度变化,使得反射在我们最易绊倒或误步时特别敏感。这种内建的机械“放大器”是工程学所谓的体现式智能的一个例子:由身体形状与材料本身(而不仅仅是软件)产生的智能行为。
对未来行走机器的意义
通过证明一种由软体、肌肉驱动的机器人腿能几乎无法区分地再现人类膝跳反射,该研究为构建更自然、更稳健的足式机器提供了蓝图。未来的类人机器人、动力外骨骼和义肢或许不再仅依赖繁重的计算与高层控制,而可采用类似的反射回路在绊倒时迅速自稳,为较慢的决策系统争取反应时间。这项工作表明,借鉴人体最简单的反射电路并将其嵌入类肌肉硬件,能让工程化的腿在敏捷性与安全性方面向人类运动迈出重要一步。
引用: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
关键词: 仿生机器人腿, 膝跳反射, 软体机器人学, 气动人工肌肉, 类人行走