Clear Sky Science · sv
Synaptisk symfoni: orkestrering av en explicit monosynaptisk reflexbåge för autonoma rörelser i ett biorobotiskt ben
Varför en knäryck-robot är viktig
Det välbekanta slaget under knäet som får benet att hoppa är mer än ett kliniskt trick — det är en av kroppens snabbaste automatiska reaktioner och hjälper oss att hålla balansen när underlaget plötsligt ändras. Denna artikel visar hur forskare byggde ett robotben som reproducerar denna knäreflex så troget att man, utifrån mätningar, knappast kan skilja det från ett mänskligt ben. Ett sådant genombrott kan göra framtida humanoida robotar, exoskelett och proteser mer stabila, responsiva och bekväma i vardagsanvändning.
Från mjuka muskler till ett livfullt robotben
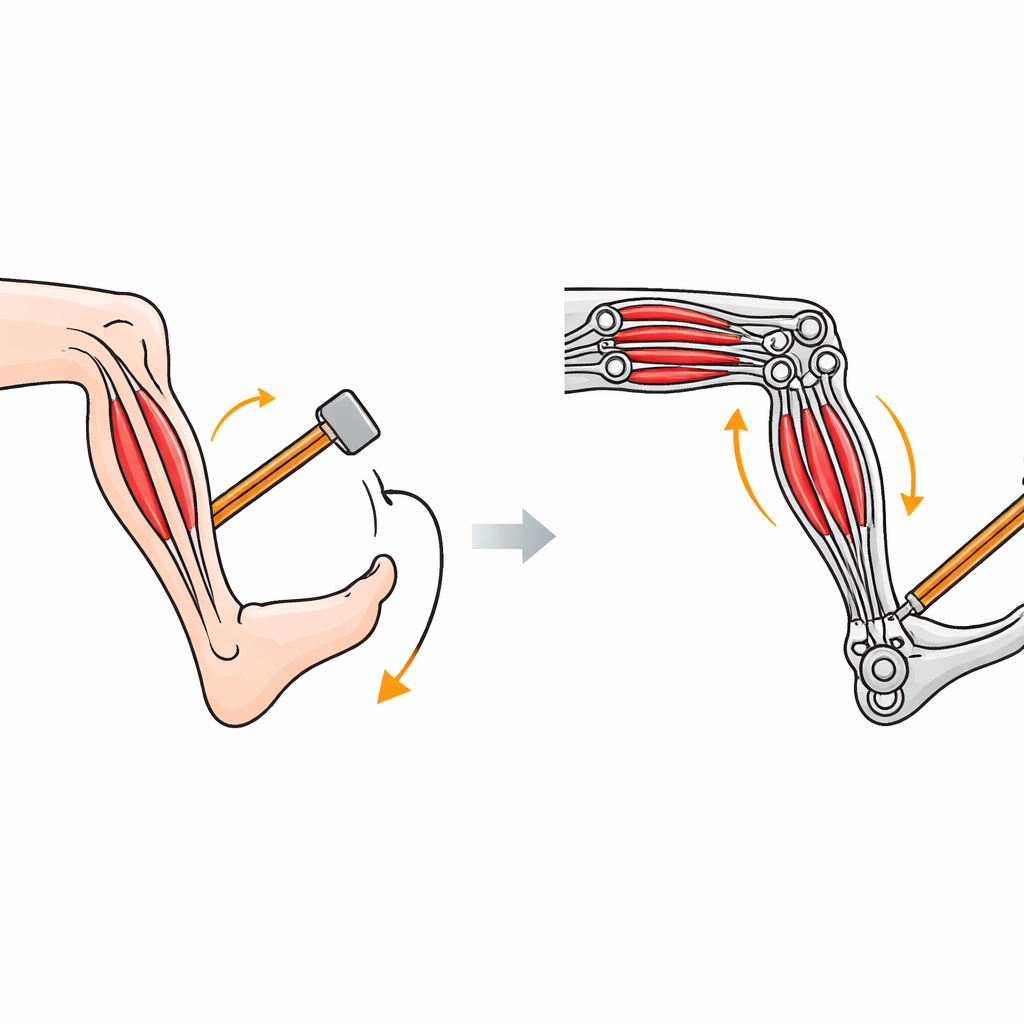
Forskarna konstruerade ett artificiellt högerben som tydligt följer mänsklig anatomi: höft, lår, knäskål, skenben och fot, med realistisk vikt och ledbeteende. Istället för styva motorer använde de fyra pneumatiska ”muskler” som förkortas när trycksatt luft fyller dem, på samma sätt som biologiska muskelfibrer. En speciellt formad knäled och routing för knäskålen säkerställer att krafter och rörelser förmedlas genom benet på samma sätt som hos människor, så att även små störningar i senan under knäskålen leder till realistisk uttöjning av de artificiella musklerna.
Att lyssna på muskler på samma sätt som kroppen
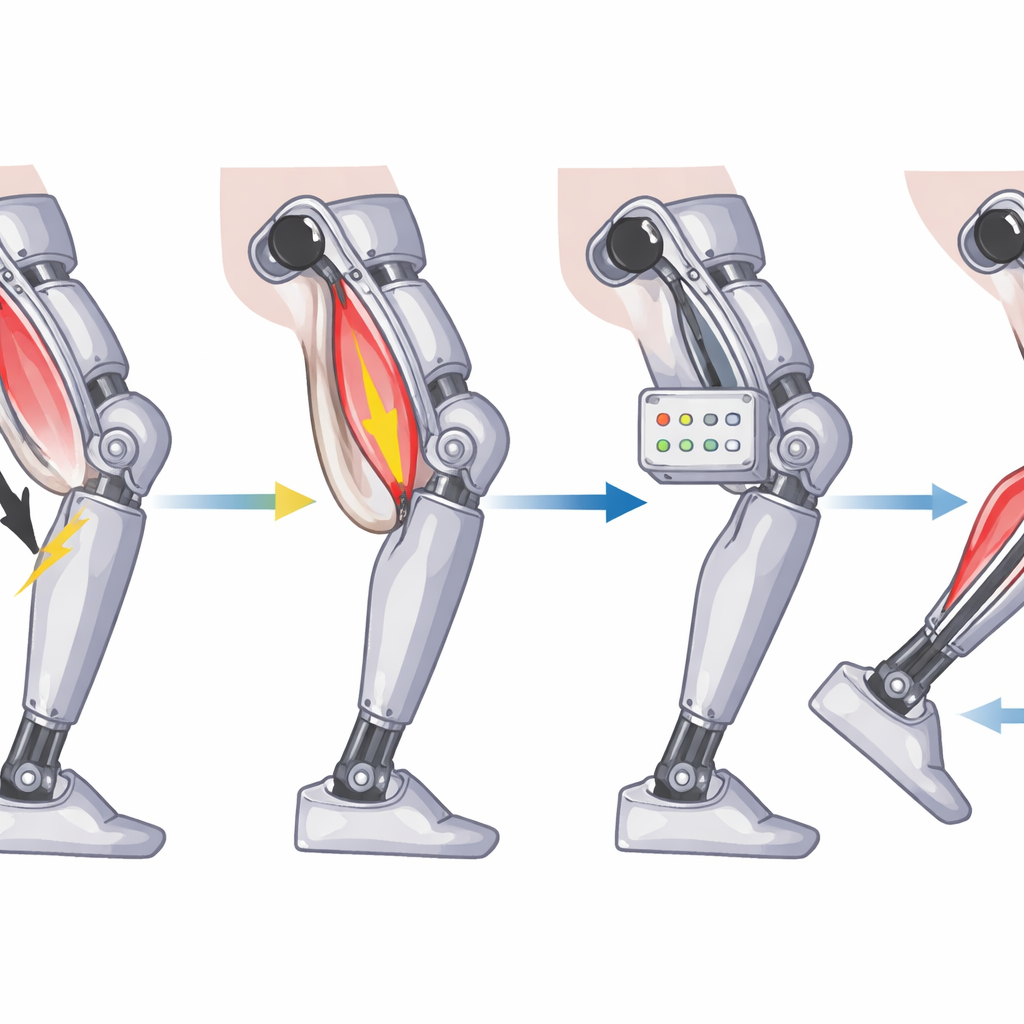
I våra kroppar upptäcker små sensorer inne i musklerna sträckning och hastighet av sträckning och skickar signaler genom en enda förbindelse i ryggmärgen — den monosynaptiska reflexbågen — för att utlösa en snabb kontraktion. Teamet efterliknade denna bana genom att inbädda sträcksensorer i varje artificiell muskel. När ett kontrollerat hammarslag sträcker de pneumatiska musklerna via senan, skickar sensorerna en elektrisk signal till en enkel styrenhet som omvandlar den till förändringar i lufttryck. Musklerna kontraherar då och svingar underbenet, precis som quadriceps gör i en mänsklig knäryckreflex.
Att utsätta robot och människor för samma test
För att se hur nära roboten kom människorna genomförde forskarna identiska experiment på 14 mänskliga försökspersoner och på det biorobotiska benet. I samtliga fall slog en pendelmonterad hammare mot senan från flera startvinklar och gav upprepbara stötar. För människor registrerade de muskelaktivitet med ytelektroder och följde benets rörelse med högfartskameror. För roboten loggade de sensorsignaler, lufttryck och ledvinklar. De jämförde sedan centrala tidpunkter: hur lång tid hammaren behövde för att nå maximal intryckning, hur snabbt den första reflexsignalen dök upp, hur lång tid innan benet började röra sig och hur länge det tog innan knäet nådde sin toppvinkel.
Timing, rörelse och en dold mekanisk förstärkning
Robotens övergripande reflexmönster — hur långt och hur snabbt knäet böjde sig — låg rakt inom spannet som observerades hos människorna för alla stötstyrkor. Tidsförloppet för de mekaniska händelserna, från hammarpåverkan till maximal bensvingning, följde också nära mänskliga värden, trots att de elektriska signalerna i roboten färdas mycket snabbare än nervimpulser. En del av denna överensstämmelse kommer från benets omsorgsfullt formade knäled och knäskålebanor, som skapar en vinkelberoende hävarm. Vid nästan raka knävinklar ger små förändringar i knävinkel större förändringar i muskelns längd, vilket gör reflexen särskilt känslig när vi löper som störst risk att snubbla eller ta fel steg. Den inbyggda mekaniska ”förstärkaren” är ett exempel på det ingenjörer kallar förkroppsligad intelligens: smart beteende som uppstår ur kroppens form och material, inte bara genom mjukvara.
Vad detta betyder för framtidens gångmaskiner
Genom att visa att ett mjukt, muskeldrivet robotben kan reproducera den mänskliga knäryckreflexen nästan oskiljaktigt, ger studien en ritning för att bygga mer naturliga och robusta benburna maskiner. Istället för att förlita sig enbart på tung beräkning och högre nivåers styrning kan framtida humanoida robotar, drivna exoskelett och proteser använda liknande reflexloopar för att snabbt räta upp sig när de snubblar, vilket ger långsammare beslutsfattande system tid att reagera. Det här arbetet antyder att låna kroppens enklaste reflexkretsar och inbädda dem i muskelliknande hårdvara kan föra konstruerade ben ett stort steg närmare mänsklig smidighet och säkerhet i rörelse.
Citering: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
Nyckelord: biorobotiskt ben, knäreflex, mjukrobotik, pneumatiska artificiella muskler, humanoid lokomotion