Clear Sky Science · nl
Synaptische symfonie: orkestratie van een expliciete monosynaptische reflexboog voor autonome bewegingen in een biorobotisch been
Waarom een knie-reflexrobot ertoe doet
De bekende tik net onder de knie die je been doet opschieten is meer dan een klinische truc — het is een van de snelste automatische reacties van het lichaam en helpt ons rechtop te blijven wanneer de ondergrond onverwacht verandert. Dit artikel laat zien hoe onderzoekers een robotbeen bouwden dat deze knie-reflex zo getrouw nabootst dat je, op basis van metingen alleen, nauwelijks kunt onderscheiden of het om een menselijk been gaat. Zo’n doorbraak kan toekomstige humanoïde robots, exoskeletten en protheses stabieler, responsiever en comfortabeler in dagelijks gebruik maken.
Van zachte spieren naar een levensecht robotbeen
De onderzoekers ontwierpen een kunstmatig rechterbeen dat nauw aansluit bij de menselijke anatomie: heup, dij, knieschijf, scheenbeen en voet met realistisch gewicht en gewrichtsgedrag. In plaats van stijve motoren gebruikten ze vier pneumatische “spieren” die verkorten wanneer ze met perslucht worden gevuld, vergelijkbaar met biologische spiervezels. Een speciaal gevormd kniegewricht en de geleiding van de knieschijf zorgen ervoor dat krachten en bewegingen door het been verlopen zoals bij mensen, zodat zelfs kleine verstoringen aan de pees onder de knieschijf leiden tot realistische rekking van de kunstspieren.
Luisteren naar spieren zoals het lichaam dat doet
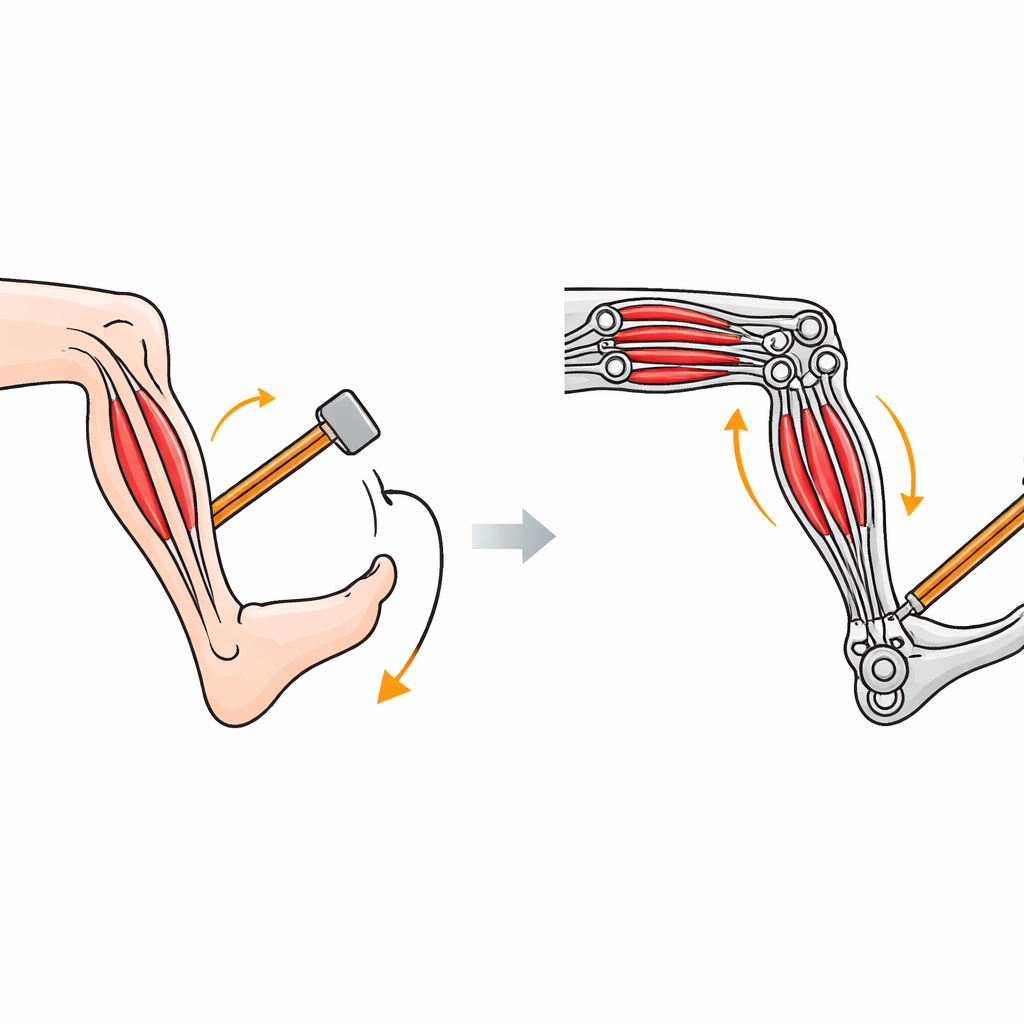
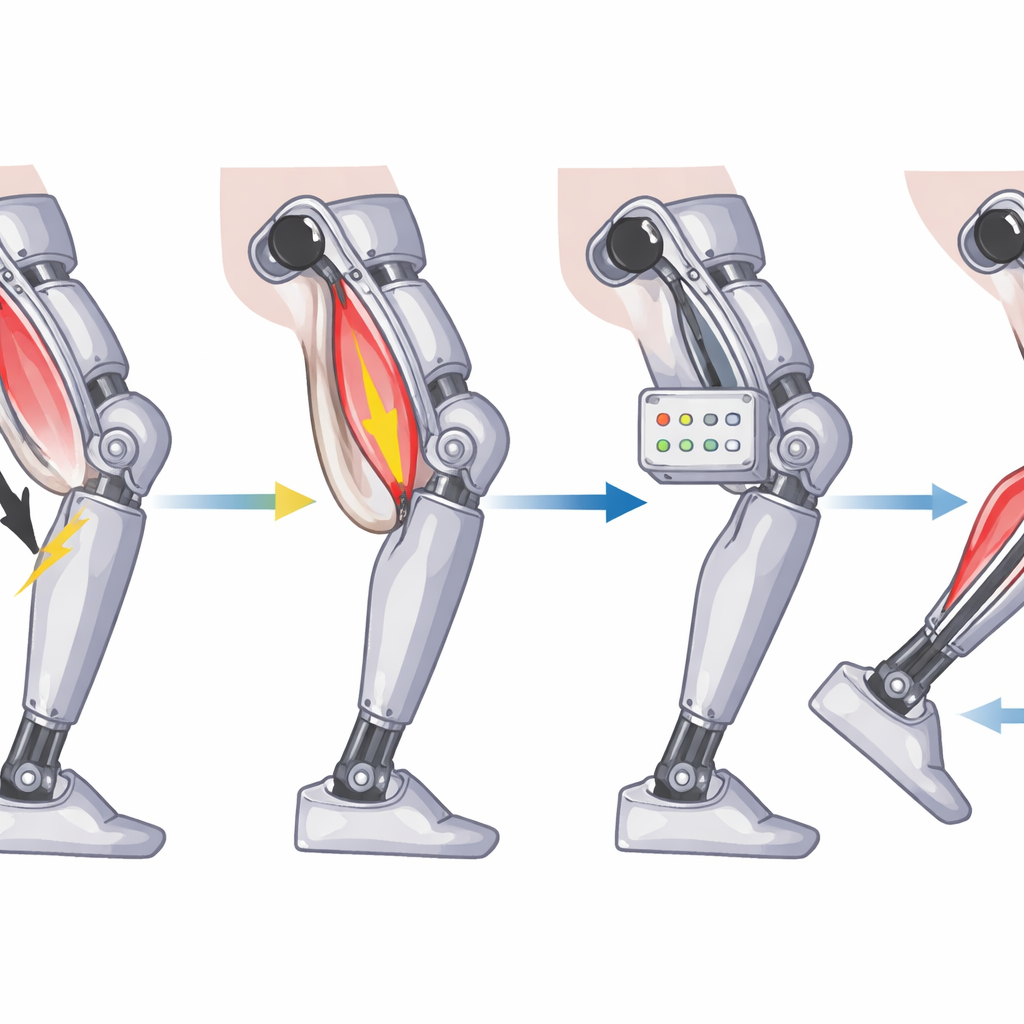
In ons lichaam detecteren kleine sensoren in spieren rek en rek-snelheid en sturen ze signalen via een enkele verbinding in het ruggenmerg — de monosynaptische reflexboog — om een snelle contractie te veroorzaken. Het team imiteerde dit pad door rek-sensoren in elke kunstspier te plaatsen. Wanneer een gecontroleerde hamerklap de pneumatische spieren via de pees rekt, zenden de sensoren een elektrisch signaal naar een eenvoudige controller, die dit omzet in veranderingen van de luchtdruk. De spieren trekken vervolgens samen en zwaaien het onderbeen naar voren, net zoals de quadriceps dat doet bij de menselijke knie-reflex.
Robot en mensen aan dezelfde proef onderwerpen
Om te bepalen hoe nauwkeurig de robot mensen nabootste, voerden de wetenschappers identieke experimenten uit met 14 menselijke proefpersonen en met het biorobotische been. In alle gevallen sloeg een aan een pendel bevestigde hamer tegen de pees vanuit verschillende beginhoeken en leverde herhaalbare tikken op. Bij mensen registreerden ze spieractiviteit met oppervlakte-elektroden en volgden ze beenbewegingen met high-speed camera’s. Bij de robot werden sensorsignalen, luchtdruk en gewrichtsbewegingen gelogd. Vervolgens vergeleken ze belangrijke tijdmetingen: hoe lang de hamer nodig had om maximale inslagdiepte te bereiken, hoe snel het eerste reflexsignaal verscheen, hoelang het duurde voordat het been begon te bewegen en hoelang totdat de knie haar piekhoek bereikte.
Tijding, beweging en een verborgen mechanisch voordeel
Het algehele reflexpatroon van de robot — hoe ver en hoe snel de knie boog — viel voor alle tiksterkten duidelijk binnen het bereik dat bij menselijke proefpersonen werd waargenomen. De timing van de mechanische gebeurtenissen, van hamerimpact tot maximale beenzwaai, volgde ook nauwgezet de menselijke waarden, ook al reizen de elektrische signalen in de robot veel sneller dan zenuwimpulsen. Een deel van deze overeenkomst komt voort uit het zorgvuldig gevormde kniegewricht en de knieschijf, die een hoekafhankelijke hefboomarm creëren. Bij vrijwel gestrekte knieën zorgen kleine veranderingen in knihoek voor grotere veranderingen in spierlengte, waardoor de reflex bijzonder gevoelig is wanneer we het meest risico lopen te struikelen of verkeerd te stappen. Deze ingebouwde mechanische “versterker” is een voorbeeld van wat ingenieurs belichaming van intelligentie noemen: slim gedrag dat voortkomt uit lichaamsvorm en materiaal, niet alleen uit software.
Wat dit betekent voor toekomstige loopmachines
Door aan te tonen dat een zacht, spiergedreven robotbeen de menselijke knie-reflex vrijwel ononderscheidbaar kan reproduceren, biedt de studie een blauwdruk voor het bouwen van natuurlijkere en robuustere loopmachines. In plaats van uitsluitend te vertrouwen op zware rekenkracht en hoog-niveau besturing, zouden toekomstige humanoïde robots, aangedreven exoskeletten en prothetische benen vergelijkbare reflexlusjes kunnen gebruiken om zichzelf snel te herstellen bij een struikeling, zodat tragere beslissingssystemen tijd krijgen om te reageren. Dit werk suggereert dat het overnemen van de eenvoudigste reflexcircuits van het lichaam en het inbouwen ervan in spierachtig hardware, geconstrueerde benen een grote stap dichter bij de behendigheid en veiligheid van menselijke beweging kan brengen.
Bronvermelding: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
Trefwoorden: biorobotisch been, kniereflex, soft robotics, pneumatische kunstspieren, humanoïde voortbeweging