Clear Sky Science · tr
Sinaptik senfoni: biyorobotik bir bacakta otonom hareketler için açık bir monosinaptik refleks arkının orkestrasyonu
Neden diz refleksi robotu önemli
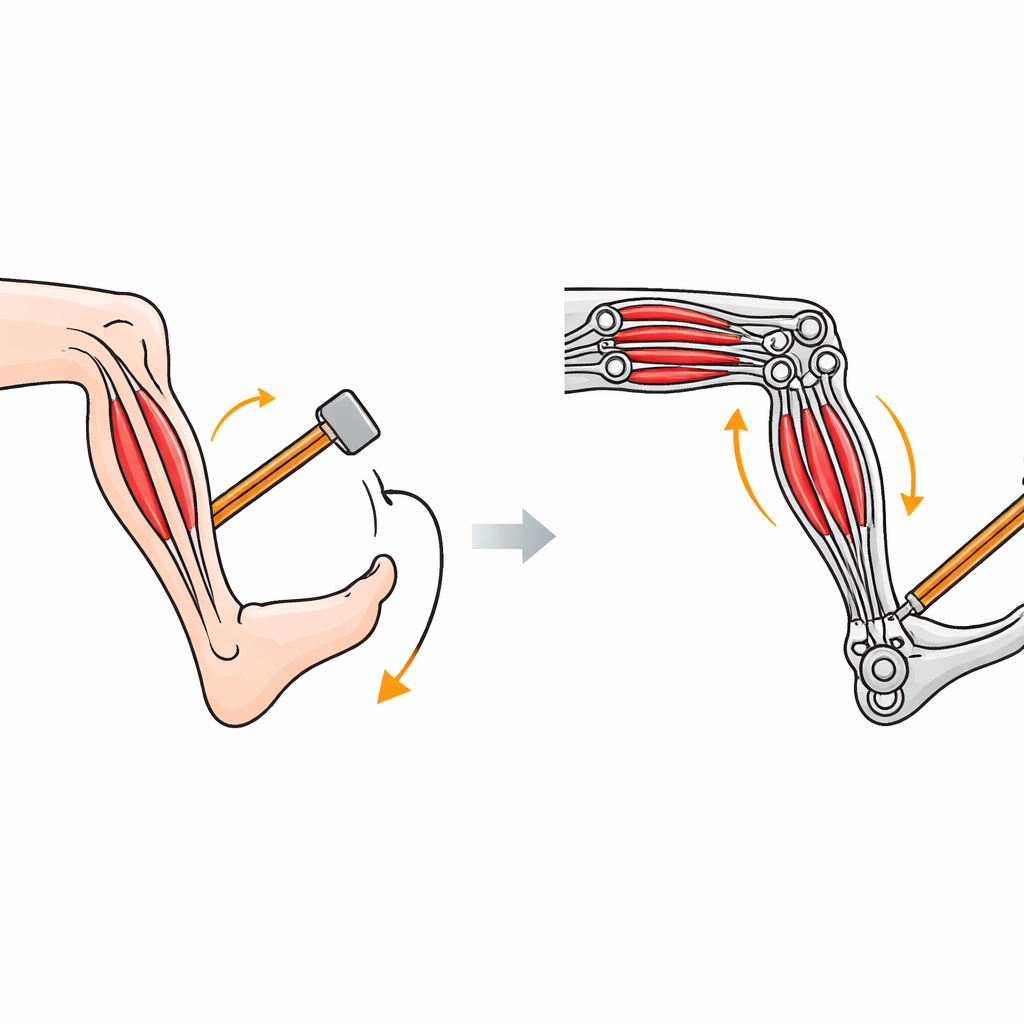
Diz altına yapılan o tanıdık dokunuşun bacağınızı sıçratması yalnızca bir klinik numara değil—vücudun en hızlı otomatik tepkilerinden biridir ve zemin beklenmedik şekilde kaydığında dik durmamıza yardımcı olur. Bu makale, bilim insanlarının diz refleksini o kadar sadık bir şekilde yeniden üreten bir robot bacak nasıl inşa ettiklerini gösteriyor ki, yalnızca ölçümlere bakarak insan bacağından ayırt etmeniz neredeyse imkânsız. Böyle bir atılım, gelecekteki insansı robotlar, dış iskeletler ve protez bacakları daha dengeli, daha tepkisel ve günlük kullanım için daha rahat hale getirebilir.
Yumuşak kaslardan canlıya yakın bir robot bacağa
Araştırmacılar, insan anatomisine yakından uyan yapay bir sağ bacak tasarladı: kalça, uyluk, diz kapağı, kaval ve gerçekçi ağırlık ve eklem davranışı olan ayak. Sert motorlar yerine, hava basıncıyla dolduklarında kısalan dört pnömatik “kas” kullandılar; bu kaslar biyolojik kas liflerine benzer şekilde çalışıyor. Özel şekillendirilmiş bir diz eklemi ve diz kapağı hattı, kuvvetlerin ve hareketlerin insanlardakiyle aynı şekilde bacağa iletilmesini sağlıyor; böylece diz kapağı altındaki tendondaki küçük bozulmalar bile yapay kasların gerçekçi şekilde gerilmesine yol açıyor.
Kasları vücudun dinlediği gibi dinlemek
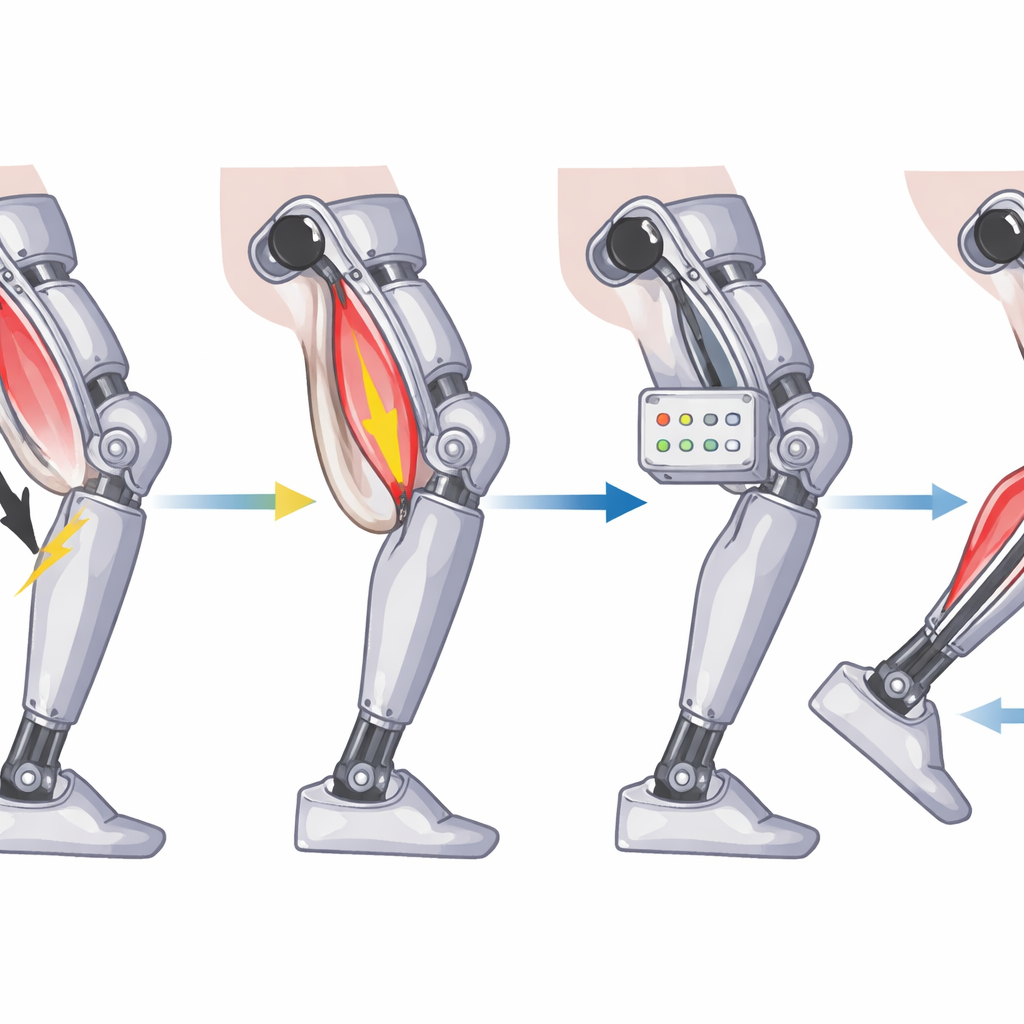
Vücudumuzda, kas içindeki küçük sensörler gerilmeyi ve gerilme hızını algılar ve omuriliğe tek bir bağlantı aracılığıyla—monosinaptik refleks arkı—sinyal göndererek hızlı bir kasılmayı tetikler. Ekip, her yapay kasın içine gerilme sensörleri gömerek bu yolu taklit etti. Kontrollü bir çekicin tendon aracılığıyla pnömatik kasları germesiyle sensörler elektrik sinyali gönderiyor; basit bir kontrolör bu sinyali hava basıncındaki değişikliklere çeviriyor. Kaslar ardından kasılıyor ve alt bacağı sallayarak, insan diz reflesindeki kuadriseps kasının yaptığı gibi hareket ettiriyor.
Robotu ve insanları aynı teste sokmak
Robotun insanlarınkine ne kadar yakın olduğunu görmek için bilim insanları 14 insan gönüllü ve biyorobotik bacak üzerinde özdeş deneyler gerçekleştirdi. Her durumda, sarkaçlı bir çekiç tendonun çeşitli başlangıç açılarından vurmasını sağlayarak tekrarlanabilir darbeler üretti. İnsanlarda yüzey elektrotlarıyla kas aktivitesini kaydettiler ve yüksek hızlı kameralarla bacak hareketini izlediler. Robot için sensör sinyallerini, hava basıncını ve eklem hareketini kaydettiler. Ardından ana zamanlamaları karşılaştırdılar: çekiç maksimum girintiye ulaşana kadar ne kadar süre gerektiği, ilk refleks sinyalinin ne kadar çabuk ortaya çıktığı, bacağın hareket etmeye başlamasına kadar geçen süre ve dizin tepe açısına ulaşana kadar geçen süre.
Zamanlama, hareket ve gizli bir mekanik avantaj
Robotun genel refleks örüntüsü—dizin ne kadar ve ne kadar hızlı büküldüğü—bütün vurma şiddetlerinde insan deneklerde gözlemlenen aralığın tam içinde kaldı. Çekiç darbesinden maksimum bacak salınımına kadar mekanik olayların zamanlaması da elektrik sinyalleri robotta sinir impulslarından çok daha hızlı seyretmesine rağmen insan değerlerini yakından izledi. Bu benzerliğin bir kısmı, diz ekleminin ve diz kapağı yolunun dikkatle şekillendirilmiş olmasından kaynaklanıyor; bunlar açıya bağlı bir kaldıraç kolu yaratıyor. Neredeyse düz diz açılarında, diz açısındaki küçük değişiklikler kas uzunluğunda daha büyük değişiklikler üretiyor ve bu da tökezleme veya yanlış basma açısından en riskli olduğumuz anda refleksi özellikle hassas kılıyor. Bu yerleşik mekanik “amplifikatör”, mühendislerin gövde şekli ve malzemeden—sadece yazılımdan—kaynaklanan zeki davranış için kullandıkları 'bedensel zeka' örneğidir.
Geleceğin yürüme makineleri için bunun anlamı
Yumuşak, kas benzeri donanımla çalışan bir robot bacağın insan diz refleksini neredeyse ayırt edilemeyecek şekilde yeniden üretebileceğini göstererek, çalışma daha doğal ve sağlam yürüyen makineler inşa etmek için bir plan sunuyor. Sadece ağır hesaplama ve üst düzey kontrole dayanmak yerine, geleceğin insansı robotları, destekleyici dış iskeletler ve protez bacaklar benzer refleks döngülerini kullanarak tökezlediklerinde kendilerini hızla toparlayabilirler; bu da daha yavaş karar verme sistemlerine tepki vermeleri için zaman kazandırır. Bu çalışma, vücudun en basit refleks devrelerini ödünç almanın ve bunları kas benzeri donanıma gömmenin mühendislik ürünü bacakları insan hareketinin çevikliği ve güvenliğine bir büyük adım daha yaklaştırabileceğini öne sürüyor.
Atıf: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
Anahtar kelimeler: biyorobotik bacak, diz reflesi, <keyword>pnömatik yapay kaslar, insansı yürüyüş