Clear Sky Science · en
Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg
Why a knee-jerk robot matters
The familiar tap below the knee that makes your leg jump is more than a clinic trick—it is one of the body’s fastest automatic reactions, helping us stay upright when the ground shifts unexpectedly. This paper shows how scientists built a robot leg that reproduces this knee-jerk reflex so faithfully that, based on measurements alone, you can hardly tell it from a human leg. Such a breakthrough could make future humanoid robots, exoskeletons, and prosthetic legs more stable, responsive, and comfortable to use in everyday life.
From soft muscles to a lifelike robot leg
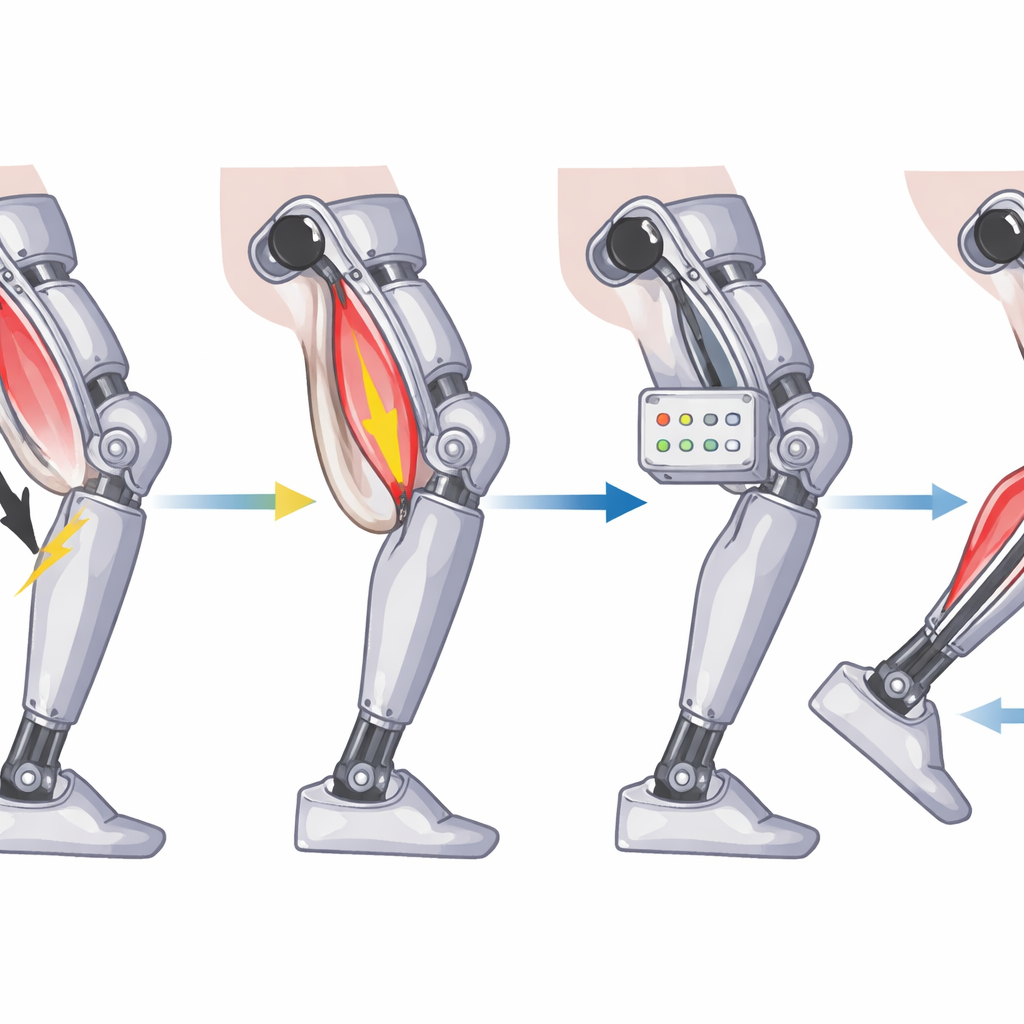
The researchers designed an artificial right leg that closely follows human anatomy: hip, thigh, kneecap, shin, and foot with realistic weight and joint behavior. Instead of rigid motors, they used four pneumatic “muscles” that shorten when pressurized air fills them, much like biological muscle fibers. A specially shaped knee joint and kneecap routing ensure that forces and motions pass through the leg in the same way they do in people, so that even small disturbances at the tendon below the kneecap lead to realistic stretching of the artificial muscles.
Listening to muscles the way the body does
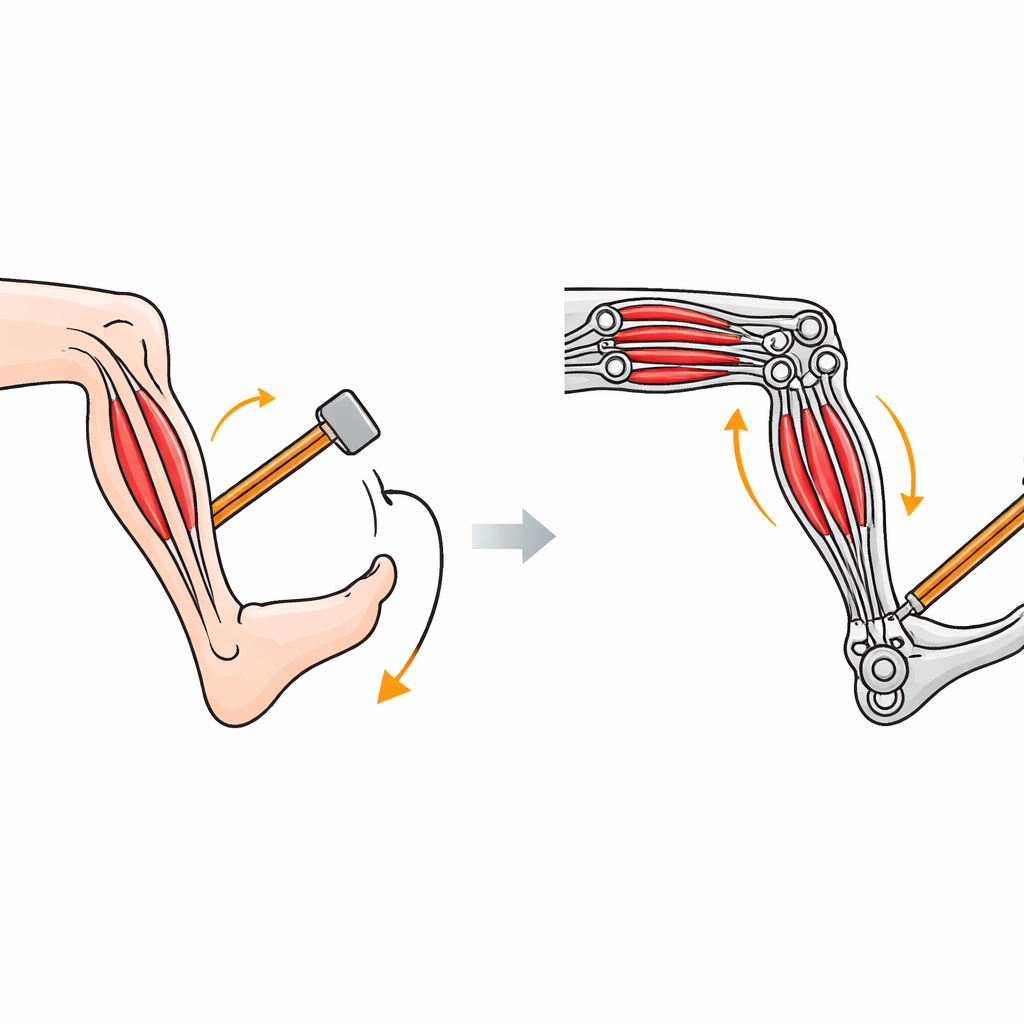
In our bodies, tiny sensors inside muscles detect stretch and speed of stretch and send signals through a single connection in the spinal cord—the monosynaptic reflex arc—to trigger a rapid contraction. The team mimicked this pathway by embedding stretch sensors inside each artificial muscle. When a controlled hammer tap stretches the pneumatic muscles via the tendon, the sensors send an electrical signal to a simple controller, which translates it into changes in air pressure. The muscles then contract, swinging the lower leg, just as the quadriceps muscle does in a human knee-jerk reflex.
Putting robot and humans to the same test
To see how closely the robot matched people, the scientists ran identical experiments on 14 human volunteers and on the biorobotic leg. In all cases, a pendulum-mounted hammer struck the tendon from several starting angles, producing repeatable taps. For humans, they recorded muscle activity with surface electrodes and tracked leg motion with high-speed cameras. For the robot, they logged sensor signals, air pressure, and joint motion. They then compared key timings: how long the hammer needed to reach maximum indentation, how quickly the first reflex signal appeared, how long until the leg started moving, and how long until the knee reached its peak angle.
Timing, motion, and a hidden mechanical advantage
The robot’s overall reflex pattern—how far and how fast the knee bent—fell squarely within the range observed in human subjects for all tap strengths. The timing of mechanical events, from hammer impact to maximum leg swing, also closely followed human values, even though the electrical signals in the robot travel much faster than nerve impulses. Part of this match comes from the leg’s carefully shaped knee joint and kneecap, which create an angle-dependent lever arm. Around nearly straight knee angles, small changes in knee angle produce larger changes in muscle length, making the reflex especially sensitive when we are most at risk of stumbling or misstepping. This built-in mechanical “amplifier” is an example of what engineers call embodied intelligence: smart behavior that arises from body shape and materials, not just from software.
What this means for future walking machines
By showing that a soft, muscle-driven robot leg can reproduce the human knee-jerk reflex almost indistinguishably, the study provides a blueprint for building more natural and robust legged machines. Instead of relying only on heavy computation and high-level control, future humanoid robots, powered exoskeletons, and prosthetic legs could use similar reflex loops to catch themselves quickly when they stumble, giving slower decision-making systems time to react. This work suggests that borrowing the body’s simplest reflex circuits, and embedding them in muscle-like hardware, can bring engineered legs a big step closer to the agility and safety of human movement.
Citation: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
Keywords: biorobotic leg, knee reflex, soft robotics, pneumatic artificial muscles, humanoid locomotion