Clear Sky Science · pl
Synfonia synaps: orkiestracja jawnego monosynaptycznego łuku odruchowego dla autonomicznych ruchów w biorobotycznej nodze
Dlaczego robot z odruchem kolanowym ma znaczenie
Zwykłe uderzenie poniżej kolana, które powoduje, że noga podskakuje, to coś więcej niż sztuczka kliniczna — to jedna z najszybszych automatycznych reakcji organizmu, pomagająca utrzymać równowagę, gdy podłoże nagle się przesuwa. W artykule pokazano, jak naukowcy zbudowali nogę robota, która odtwarza ten odruch kolanowy tak wiernie, że na podstawie samych pomiarów trudno odróżnić ją od nogi ludzkiej. Taki przełom może uczynić przyszłe roboty humanoidalne, egzoszkielety i protezy kolan bardziej stabilnymi, responsywnymi i komfortowymi w codziennym użyciu.
Od miękkich mięśni do realistycznej nogi robota
Naukowcy zaprojektowali sztuczną prawą nogę, która wiernie odzwierciedla ludzką anatomię: biodro, udo, rzepkę, goleń i stopę o realistycznej masie i zachowaniu stawów. Zamiast sztywnych silników użyli czterech pneumatycznych „mięśni”, które skracają się pod wpływem napełnienia sprężonym powietrzem, podobnie jak włókna mięśniowe. Specjalnie ukształtowany staw kolanowy i prowadzenie rzepki gwarantują, że siły i ruchy przechodzą przez nogę w taki sam sposób jak u ludzi, więc nawet niewielkie zakłócenia przy ścięgnie pod rzepką prowadzą do realistycznego rozciągnięcia sztucznych mięśni.
Słuchając mięśni tak jak robi to ciało
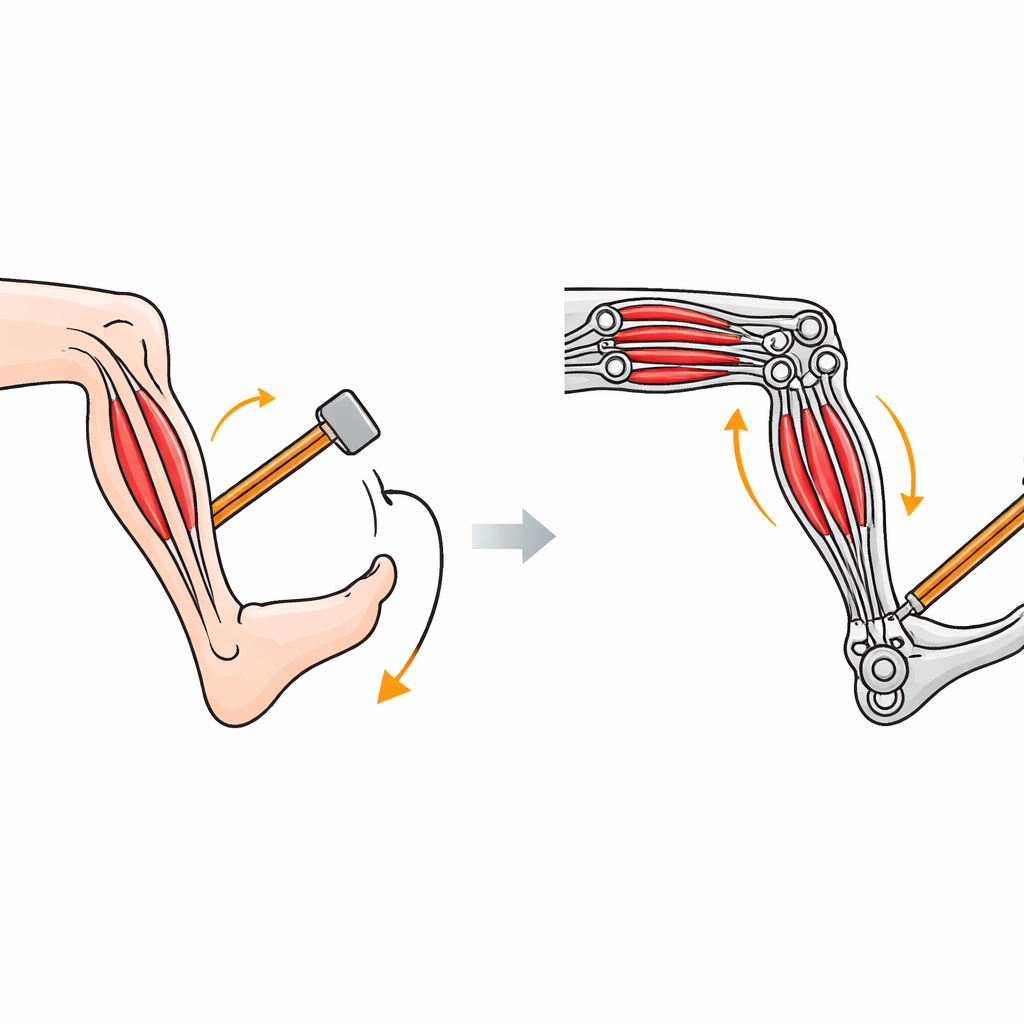
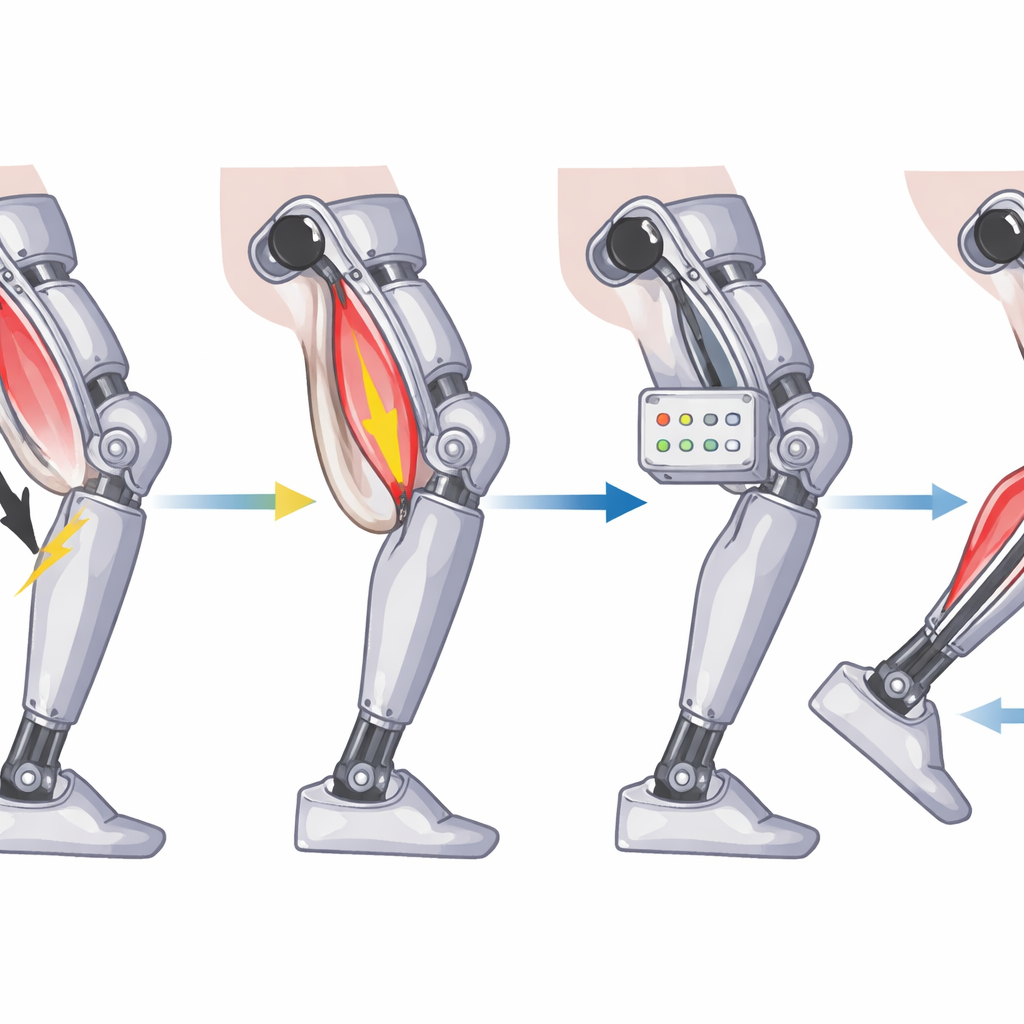
W naszych ciałach drobne czujniki wewnątrz mięśni wykrywają rozciągnięcie i szybkość rozciągania oraz przesyłają sygnały przez pojedyncze połączenie w rdzeniu kręgowym — monosynaptyczny łuk odruchowy — aby wywołać szybkie skurcze. Zespół naśladował tę ścieżkę, umieszczając czujniki rozciągania wewnątrz każdego sztucznego mięśnia. Gdy kontrolowany cios młotka rozciąga pneumatyczne mięśnie przez ścięgno, czujniki wysyłają sygnał elektryczny do prostego sterownika, który przekształca go w zmiany ciśnienia powietrza. Mięśnie kurczą się, kołysząc dolną częścią nogi, dokładnie tak jak mięsień czworogłowy robi to w ludzkim odruchu kolanowym.
Testując robota i ludzi w tych samych warunkach
Aby sprawdzić, jak bardzo robot przypomina ludzi, naukowcy przeprowadzili identyczne eksperymenty na 14 ochotnikach i na biorobotycznej nodze. W każdym przypadku młotek zamocowany na wahadle uderzał w ścięgno z kilku kątów wyjściowych, generując powtarzalne uderzenia. U ludzi rejestrowali aktywność mięśni za pomocą elektrod powierzchniowych i śledzili ruch nogi kamerami wysokiej prędkości. W przypadku robota logowali sygnały z czujników, ciśnienie powietrza i ruchy stawów. Następnie porównali kluczowe czasy: ile trwało dotarcie młotka do maksymalnego wgłębienia, jak szybko pojawił się pierwszy sygnał odruchowy, jak długo do rozpoczęcia ruchu nogi i ile czasu minęło do osiągnięcia maksymalnego kąta kolana.
Czas, ruch i ukryta przewaga mechaniczna
Ogólny wzorzec odruchu robota — jak daleko i jak szybko zgięło się kolano — mieścił się w zakresie obserwowanym u ludzi dla wszystkich sił uderzenia. Czasowanie zdarzeń mechanicznych, od uderzenia młotka do maksymalnego kołysania nogi, również ściśle odpowiadało wartościom ludzkim, mimo że sygnały elektryczne w robocie przemieszczają się znacznie szybciej niż impulsy nerwowe. Częściowo taka zgodność wynika z precyzyjnie ukształtowanego stawu kolanowego i prowadzenia rzepki, które tworzą ramie dźwigni zależne od kąta. Przy niemal wyprostowanym kolanie małe zmiany kąta powodują większe zmiany długości mięśnia, co sprawia, że odruch jest szczególnie czuły, gdy najbardziej narażeni jesteśmy na potknięcie lub błąd krokowy. Ten wbudowany mechaniczny „wzmacniacz” to przykład tego, co inżynierowie nazywają uczeniem ucieleśnionym: inteligentne zachowanie wynikające z kształtu ciała i materiałów, a nie tylko z oprogramowania.
Co to oznacza dla przyszłych maszyn kroczących
Pokazując, że miękka, sterowana mięśniami noga robota może odtworzyć ludzki odruch kolanowy niemal bez rozróżnienia, badanie dostarcza planu budowy bardziej naturalnych i odpornych maszyn kroczących. Zamiast polegać wyłącznie na ciężkich obliczeniach i sterowaniu wysokiego poziomu, przyszłe roboty humanoidalne, zasilane egzoszkielety i protezy nóg mogłyby wykorzystywać podobne pętle odruchowe, by szybko łapać równowagę po potknięciu, dając powolniejszym systemom decyzyjnym czas na reakcję. Praca ta sugeruje, że zapożyczenie najprostszych obwodów odruchowych ciała i osadzenie ich w sprzęcie przypominającym mięśnie może przybliżyć inżynierskie nogi do zwinności i bezpieczeństwa ruchu ludzkiego.
Cytowanie: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
Słowa kluczowe: biorobotyczna noga, odruch kolanowy, robotyka miękka, pneumatyczne mięśnie sztuczne, lokomocja humanoidalna