Clear Sky Science · ru
Синаптическая симфония: оркестровка явной моносинаптической рефлекторной дуги для автономных движений в биороботизированной ноге
Почему коленный рефлекс в роботе важен
Знакомый удар чуть ниже колена, из‑за которого нога вздрагивает, — это не просто клинический трюк: это одна из самых быстрых автоматических реакций организма, помогающая нам сохранять равновесие, когда поверхность под ногами неожиданно сдвигается. В этой работе показано, как учёные создали роботизированную ногу, воспроизводящую этот коленный рефлекс с такой точностью, что по измерениям её почти невозможно отличить от человеческой. Такой прорыв может сделать будущих гуманоидных роботов, экзоскелеты и протезы устойчивее, быстрее реагирующими и более удобными в повседневном использовании.
От мягких «мышц» к правдоподобной ноге
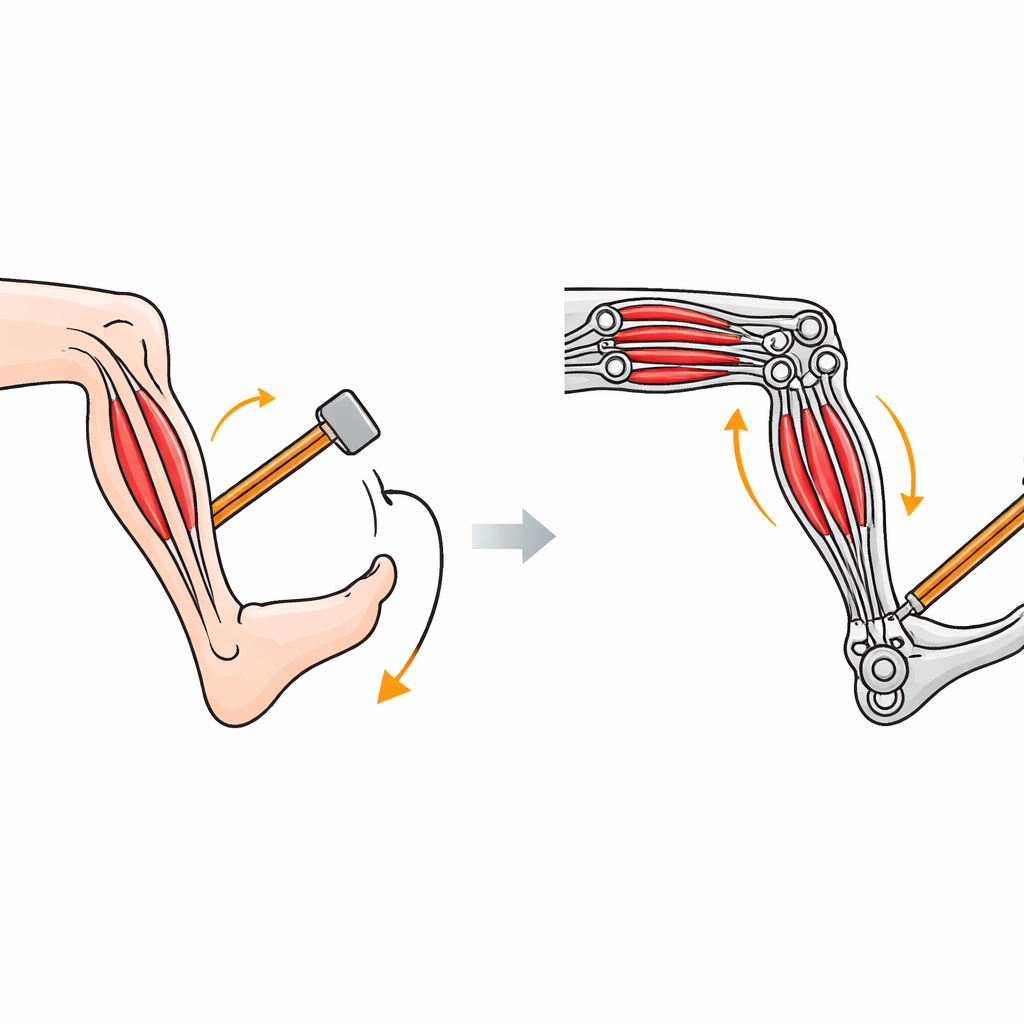
Исследователи спроектировали искусственную правую ногу, воспроизводящую человеческую анатомию: тазобедренный сустав, бедро, надколенник, голень и стопа с реалистичной массой и поведением сочленений. Вместо жёстких моторов они использовали четыре пневматические «мышцы», сокращающиеся при заполнении сжатым воздухом, подобно волокнам биологической мышцы. Специально сформированный коленный сустав и проводка через надколенник обеспечивают передачу сил и движений через ногу так же, как у человека, поэтому даже небольшие возмущения в сухожилии под надколенником приводят к реалистичному растяжению искусственных мышц.
Слушая мышцы так же, как тело
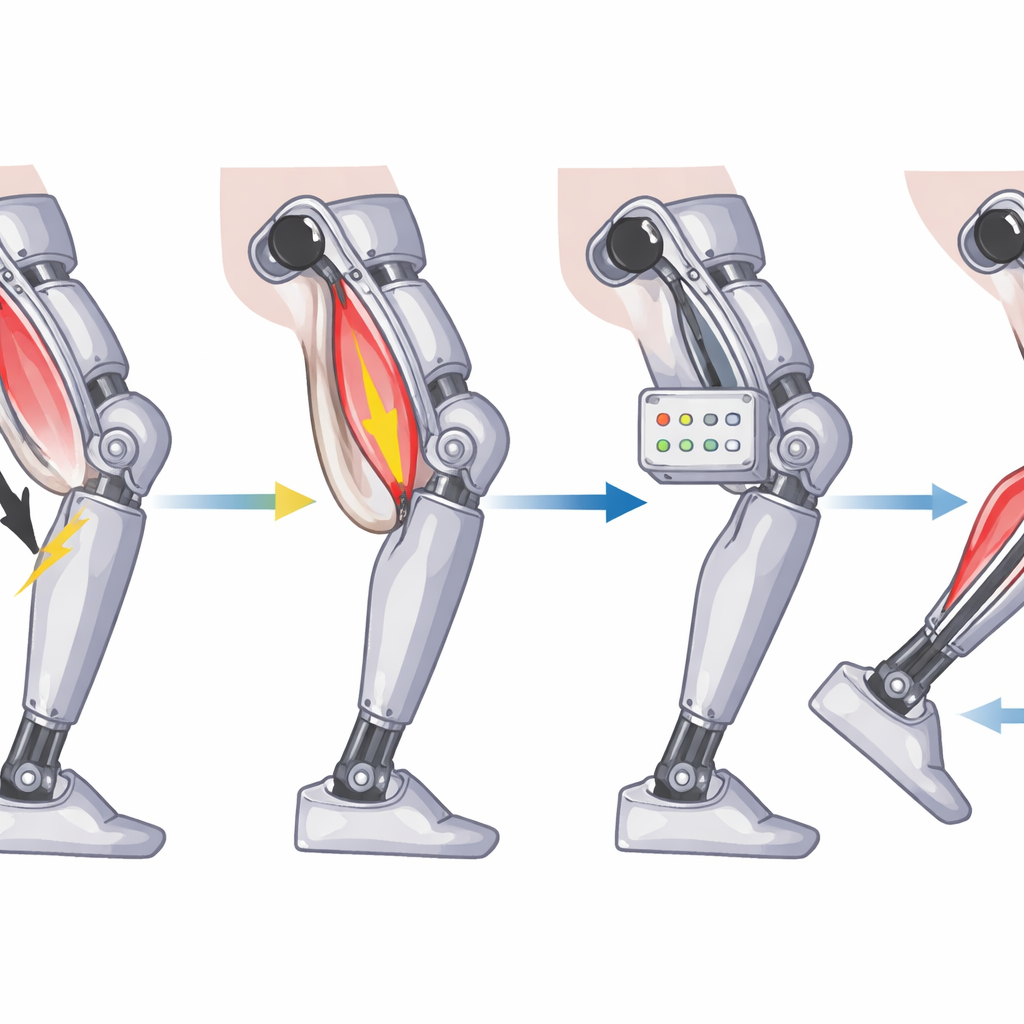
В организме крошечные датчики внутри мышц фиксируют растяжение и скорость растяжения и передают сигналы по единственному пути в спинном мозге — моносинаптической рефлекторной дуге — чтобы вызвать быструю контрактировку. Команда имитировала этот путь, встроив датчики растяжения в каждую искусственную мышцу. Когда контролируемый удар молоточка растягивает пневматические мышцы через сухожилие, датчики посылают электрический сигнал простому контроллеру, который переводит его в изменение давления воздуха. Мышцы сокращаются и раскачивают голень, так же как квадрицепс действует при человеческом коленном рефлексе.
Сравнение робота и людей в одинаковых испытаниях
Чтобы оценить степень сходства робота и человека, учёные провели одинаковые эксперименты на 14 добровольцах и на биороботизированной ноге. В каждом случае молоточек, подвешенный на маятнике, ударял по сухожилию из разных исходных углов, создавая воспроизводимые постукивания. У людей регистрировали активность мышц поверхностными электродами и отслеживали движение ноги высокоскоростными камерами. У робота фиксировали сигналы датчиков, давление воздуха и движение суставов. Затем сравнивали ключевые временные показатели: сколько времени молоточку нужно до максимальной индентации, как быстро появляется первый рефлекторный сигнал, сколько времени проходит до начала движения ноги и до достижения коленом максимального угла.
Время, движение и скрытое механическое преимущество
Общая картина рефлекса у робота — насколько сильно и насколько быстро сгибалось колено — полностью укладывалась в диапазон, наблюдаемый у людей, для всех сил ударов. Временная последовательность механических событий, от удара молотка до максимального раскачивания ноги, также близко соответствовала человеческим значениям, хотя электрические сигналы в роботе проходят гораздо быстрее, чем нервные импульсы. Часть этого соответствия объясняется тщательно сконструированным коленным суставом и проводкой через надколенник, которые создают плечо рычага, зависящее от угла. При почти разогнутом колене небольшие изменения угла приводят к больших изменениям длины мышцы, делая рефлекс особенно чувствительным именно когда риск споткнуться или оступиться максимален. Этот встроенный механический «усилитель» — пример того, что инженеры называют воплощённым интеллектом: разумное поведение, возникающее из формы тела и свойств материалов, а не только из программного управления.
Что это значит для будущих ходящих машин
Показав, что мягкая нога с мышечной приводкой может почти неотличимо воспроизводить человеческий коленный рефлекс, исследование даёт шаблон для создания более естественных и надёжных шагательных машин. Вместо того чтобы полагаться только на тяжёлые вычисления и высокоуровневое управление, будущие гуманоиды, усиленные экзоскелеты и протезы могли бы использовать похожие рефлекторные петли, чтобы быстро «словить» себя при споткновении, давая более медленным системам принятия решений время среагировать. Эта работа показывает, что заимствование самых простых рефлекторных цепей тела и встраивание их в мышце‑подобный аппарат может приблизить искусственные ноги к подвижности и безопасности человеческого движения на значительный шаг.
Цитирование: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
Ключевые слова: биороботизированная нога, коленный рефлекс, мягкая робототехника, пневматические искусственные мышцы, человекообразная локомоция