Clear Sky Science · he
סימפוניה סינפטית: עיצוב של קשת רפלקס מונוסינפטית מפורשת לתנועות אוטונומיות ברגל ביורובוטית
למה רובוט עם רפלקס ברך חשוב
המכת המוכרת מתחת לברך שגורמת לרגל להקפיץ אינה רק טריק קליני — זה אחד התגובות האוטומטיות המהירות של הגוף, שעוזר לנו להישאר זקופים כאשר המשטח משתנה באופן בלתי צפוי. מאמר זה מראה כיצד מדענים בנו רגל רובוטית המשחזרת את רפלקס הברך כל כך בדיוק, עד שניתן בקושי להבחין בינה לבין רגל אנושית על סמך מדידות בלבד. ההישג הזה עשוי להפוך רובוטים הומנואידיים עתידיים, אקסוסקלטונים ופרוטזות לרגל ליציבים, מגיבים ונוחים יותר לשימוש בחיי היומיום.
משרירים רכים לרגל רובוטית דמוית חיים
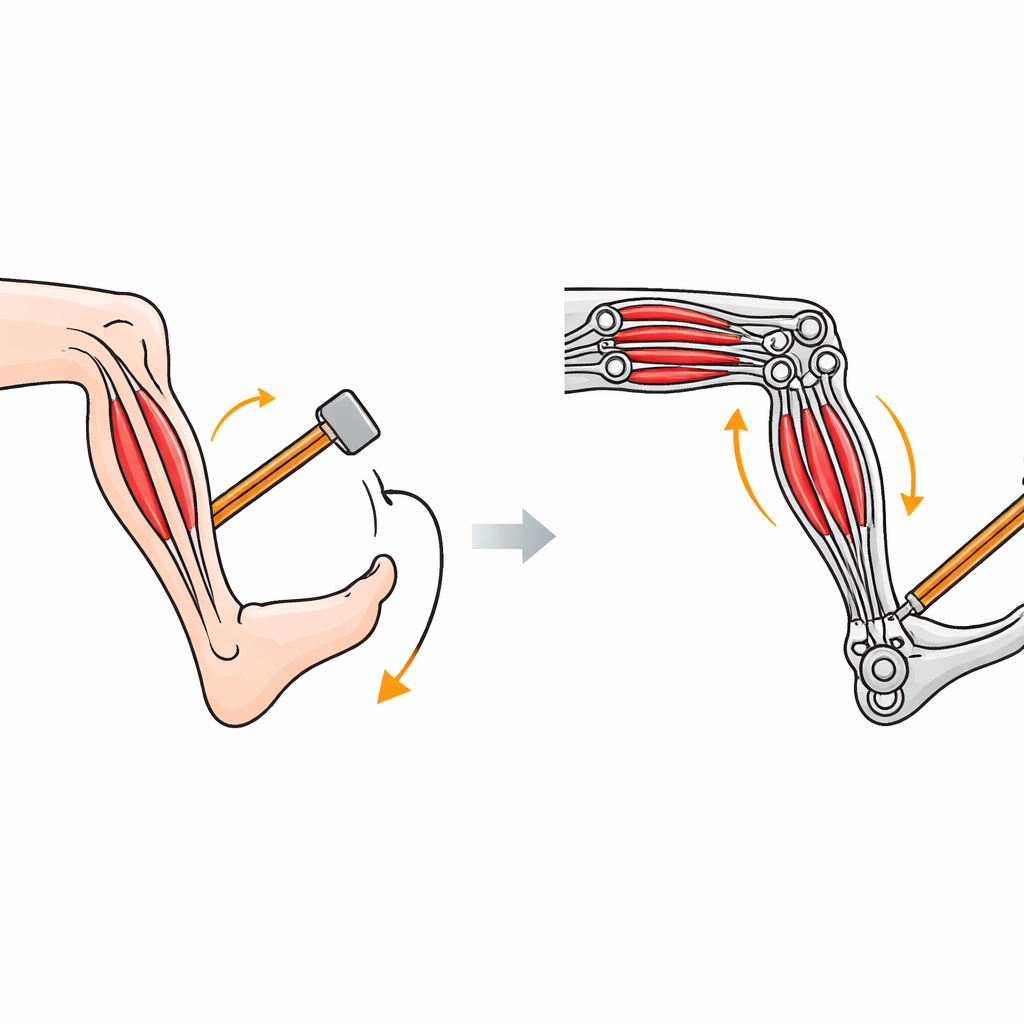
החוקרים עצבו רגל ימנית מלאכותית העוקבת במדויק אחרי אנטומיה אנושית: ירך, שריר הירך, פיקה, שוק וכף רגל עם משקל והתנהגות מפרקים ריאליסטיים. במקום מנועים קשיחים השתמשו בארבעה "שרירים" פנאומטיים שקוצרים כשהם ממולאים באוויר בלחץ, בדומה לסיבי שריר ביולוגיים. מפרק ברך מעוצב במיוחד וכיוון דרך הפיקה מבטיחים שכוחות ותנועות יעברו דרך הרגל באותה צורה כפי שקורה באדם, כך שגם הפרעות קטנות בגיד מתחת לפיקה יביאו למתיחה ריאליסטית של השרירים המלאכותיים.
להקשיב לשרירים כפי שהגוף עושה
בגופנו, חיישנים זעירים בתוך השרירים מזהים מתיחה ומהירות המתיחה ושולחים אות דרך חיבור יחיד בעמוד השדרה — קשת רפלקס מונוסינפטית — כדי לגרום לכיווץ מהיר. הצוות חיקה נתיב זה על ידי הטמעת חיישני מתיחה בתוך כל שריר מלאכותי. כאשר פטיש מבוקר טופח וממתח את השרירים הפנאומטיים דרך הגיד, החיישנים שולחים אות חשמלי לבקר פשוט, שמתרגם אותו לשינויים בלחץ האוויר. השרירים מתכווצים ואז מניעים את חלק השוק, בדיוק כפי שעושה שריר הארבע-ראשי ברפלקס הברך האנושי.
להעמיד את הרובוט והאדם לאותו מבחן
כדי לבדוק עד כמה הרובוט דומה לאנשים, המדענים ערכו ניסויים זהים על 14 מתנדבים אנושיים ועל הרגל הביורובוטית. בכל המקרים פטיש תלוי על מטוטלת פגע בגיד מזוויות התחלה שונות, ויצר טפיחות חוזרות. באנשים הקליטו פעילות שרירים באמצעות אלקטרודות שטח ועקבו אחרי תנועת הרגל במצלמות מהירות גבוהות. ברובוט רישמו את אותות החיישנים, לחצי האוויר ותנועת המפרקים. לאחר מכן השוו זמנים מרכזיים: כמה זמן לקח לפטיש להגיע לעומק המרבי, כמה מהר הופיע האות הרפלקסי הראשון, כמה זמן עד שהרגל החלה לזוז וכמה זמן עד שהברך הגיעה לזווית השיא שלה.
תזמון, תנועה ויתרון מכני נסתר
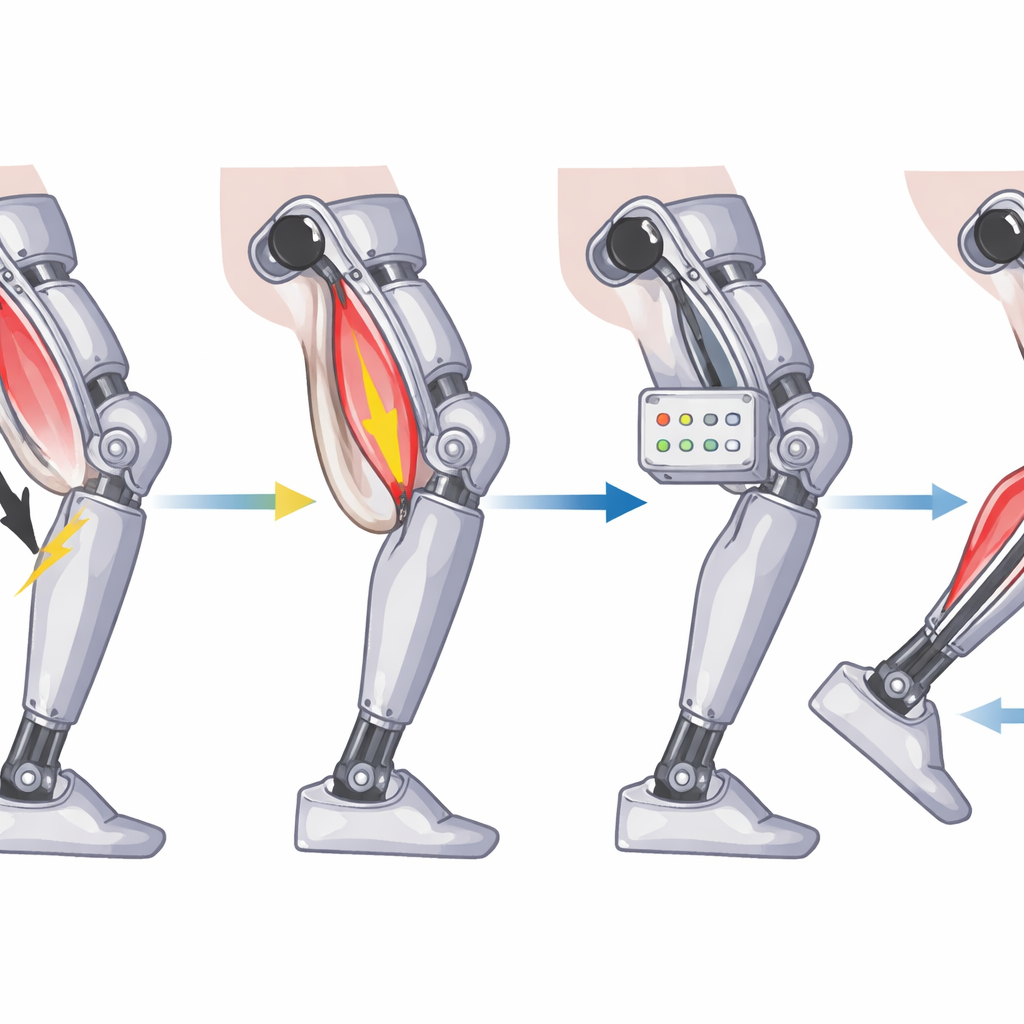
דפוס הרפלקס הכולל של הרובוט — כמה וכמה מהר הברך כופפת — היה בדיוק בטווח שנצפה בנבדקים אנושיים עבור כל עוצמות הטפיחה. גם התזמון של האירועים המכניים, מפגיעה של הפטיש עד לנחיתת התנועה המקסימלית של הרגל, עקב באופן הדוק אחרי הערכים האנושיים, אף על פי שהאותות החשמליים ברובוט נעים הרבה יותר מהר מאשר דחפי העצב. חלק מההתאמה הזו נובע ממפרק הברך המעוצב בקפידה ומהכוונת הפיקה, שיוצריםזרוע מנוף שתלויה בזווית. סביב זוויות ברך כמעט ישרות, שינויים קטנים בזווית הברך מייצרים שינויים גדולים יותר באורך השריר, מה שמקנה לרפלקס רגישות מיוחדת דווקא כאשר אנו בסיכון להיתקל או לטעות בצעד. "מגבר" מכני מובנה זה הוא דוגמה למה שהמהנדסים קוראים אינטיליגנציה מגושמת: התנהגות חכמה הנובעת מצורת הגוף והחומרים, לא רק מתוכנה.
מה משמעות הדבר למכונות הליכה בעתיד
בהדגמה שגובהה שרגל רובוטית רכה המונעת על ידי "שרירים" יכולה לשחזר את רפלקס הברך האנושי באופן כמעט בלתי נית מובהק, המחקר מספק תבנית לבניית מכונות רגליים טבעיות ועמידות יותר. במקום להסתמך רק על חישוב כבד ושליטה ברמה גבוהה, רובוטים הומנואידיים עתידיים, אקסוסקלטונים ממונעים ופרוטזות יכולים להשתמש בלולאות רפלקס דומות כדי לתפוס את עצמם במהירות כשנתפשים, ולתת למערכות קבלת ההחלטות האיטיות יותר זמן להגיב. עבודה זו מציעה כי שאיבת השרידים הפשוטים ביותר של מעגלי הרפלקס של הגוף והטמעתם בחומרה דמוית שריר, יכולה לקרב רגליים הנדסיות צעד גדול יותר לקלות התנועה ולבטיחות של תנועה אנושית.
ציטוט: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
מילות מפתח: רגל ביורובוטית, רפלקס ברך, רובוטיקה רכה, שרירים מלאכותיים פנציאומטיים, לוקומוציה הומנואידית