Clear Sky Science · es
Sinfonía sináptica: orquestación de un arco reflejo monosináptico explícito para movimientos autónomos en una pierna biorobótica
Por qué importa un robot con reflejo rotuliano
El conocido golpe bajo la rodilla que hace que la pierna salte no es solo un truco de consulta médica: es una de las reacciones automáticas más rápidas del cuerpo y nos ayuda a mantenernos erguidos cuando el suelo cambia inesperadamente. Este artículo muestra cómo los científicos construyeron una pierna robótica que reproduce este reflejo rotuliano con tanta fidelidad que, basándose únicamente en las mediciones, apenas se puede distinguir de una pierna humana. Un avance así podría hacer que los futuros robots humanoides, exoesqueletos y prótesis de pierna sean más estables, sensibles y cómodos para el uso cotidiano.
De músculos blandos a una pierna robótica realista
Los investigadores diseñaron una pierna artificial derecha que sigue de cerca la anatomía humana: cadera, muslo, rótula, espinilla y pie con peso y comportamiento articular realistas. En lugar de motores rígidos, usaron cuatro “músculos” neumáticos que se acortan cuando se llenan de aire presurizado, de manera similar a las fibras musculares biológicas. Una articulación de rodilla y un enrutamiento de la rótula especialmente diseñados aseguran que las fuerzas y los movimientos atraviesen la pierna de la misma forma que en las personas, de modo que incluso pequeñas perturbaciones en el tendón bajo la rótula produzcan un estiramiento realista de los músculos artificiales.
Escuchar los músculos como lo hace el cuerpo
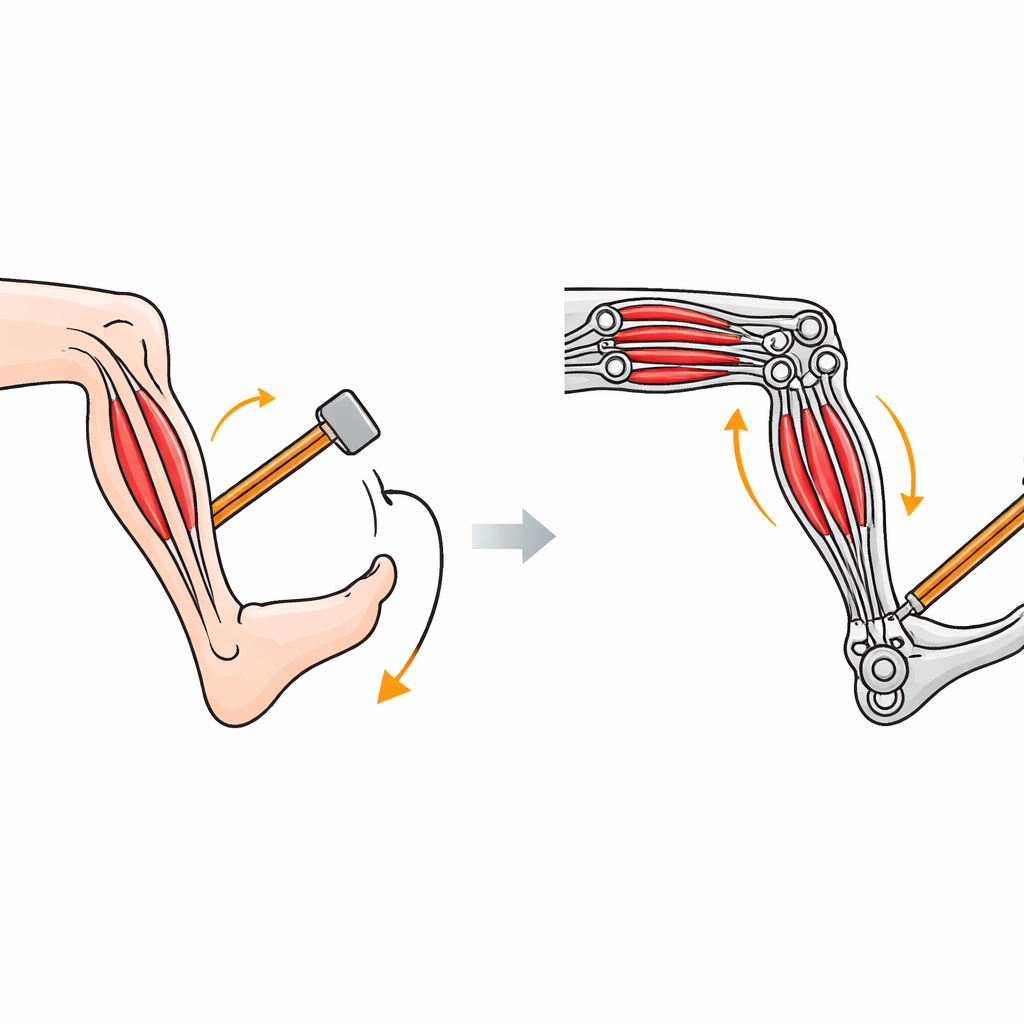
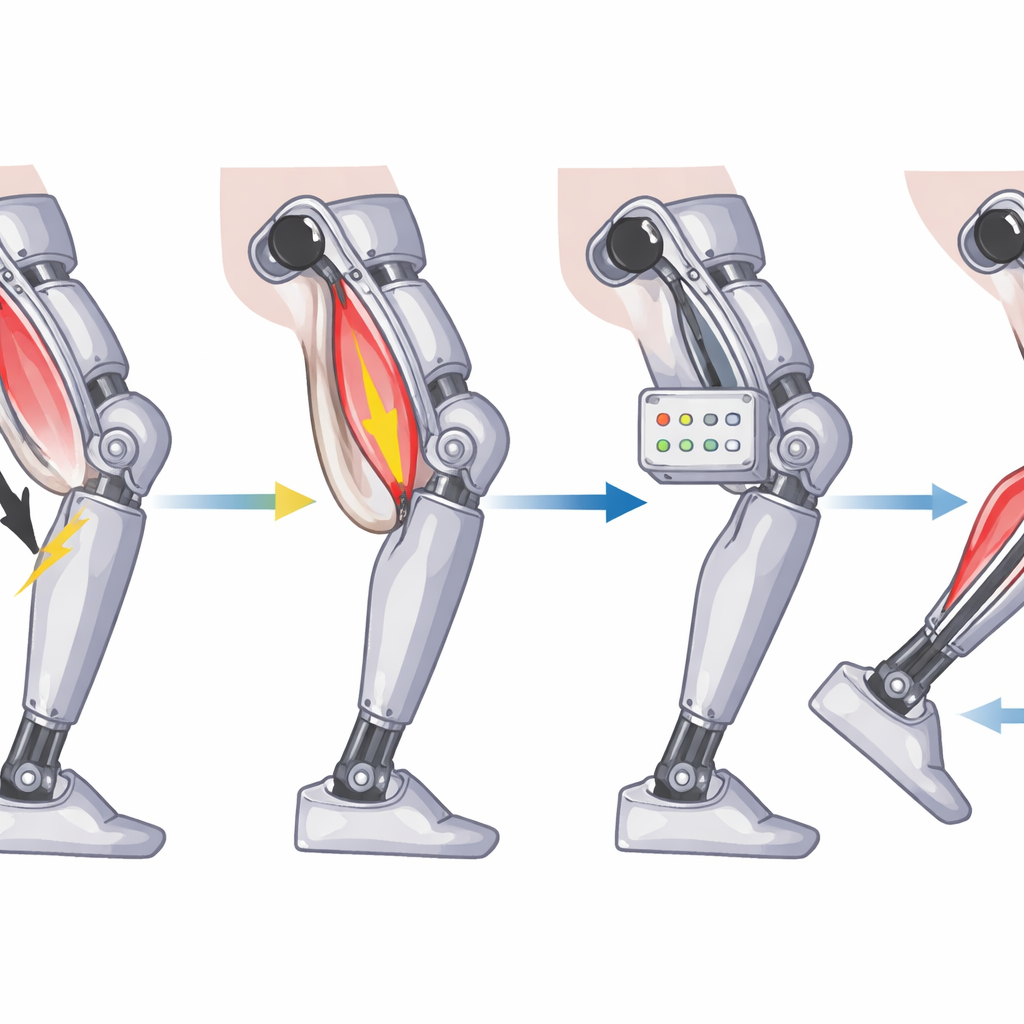
En nuestro cuerpo, diminutos sensores dentro de los músculos detectan el estiramiento y la velocidad del estiramiento y envían señales a través de una conexión única en la médula espinal—el arco reflejo monosináptico—para desencadenar una contracción rápida. El equipo imitó esta vía insertando sensores de estiramiento dentro de cada músculo artificial. Cuando un golpe controlado con un martillo estira los músculos neumáticos a través del tendón, los sensores envían una señal eléctrica a un controlador sencillo, que la traduce en cambios de presión de aire. Los músculos entonces se contraen, balanceando la parte inferior de la pierna, tal como lo hace el cuádriceps en el reflejo rotuliano humano.
Poniendo a prueba al robot y a los humanos de la misma manera
Para ver qué tan cerca estaba el robot de las personas, los científicos realizaron experimentos idénticos en 14 voluntarios humanos y en la pierna biorobótica. En todos los casos, un martillo montado en un péndulo golpeó el tendón desde varios ángulos iniciales, produciendo golpes repetibles. En los humanos registraron la actividad muscular con electrodos de superficie y siguieron el movimiento de la pierna con cámaras de alta velocidad. En el robot registraron señales de los sensores, presión de aire y movimiento articular. Luego compararon tiempos clave: cuánto tardó el martillo en alcanzar la máxima indentación, cuán rápido apareció la primera señal refleja, cuánto tiempo hasta que la pierna comenzó a moverse y cuánto hasta que la rodilla alcanzó su ángulo máximo.
Tiempo, movimiento y una ventaja mecánica oculta
El patrón general del reflejo del robot—qué tan lejos y qué tan rápido se dobló la rodilla—cayó claramente dentro del rango observado en los sujetos humanos para todas las intensidades de golpe. La sincronización de los eventos mecánicos, desde el impacto del martillo hasta el balanceo máximo de la pierna, también siguió de cerca los valores humanos, aunque las señales eléctricas en el robot viajan mucho más rápido que los impulsos nerviosos. Parte de esta coincidencia se debe a la articulación de rodilla y la rótula cuidadosamente conformadas, que crean un brazo de palanca dependiente del ángulo. Cerca de ángulos de rodilla casi rectos, pequeños cambios en el ángulo producen cambios mayores en la longitud del músculo, haciendo que el reflejo sea especialmente sensible cuando más riesgo hay de tropezar o errar un paso. Este “amplificador” mecánico incorporado es un ejemplo de lo que los ingenieros llaman inteligencia incorporada: un comportamiento inteligente que surge de la forma y los materiales del cuerpo, no solo del software.
Lo que esto significa para las máquinas caminantes del futuro
Al demostrar que una pierna robótica blanda impulsada por músculos puede reproducir el reflejo rotuliano humano casi sin distinción, el estudio ofrece un plano para construir máquinas con patas más naturales y robustas. En lugar de depender únicamente de cálculo pesado y control de alto nivel, los futuros robots humanoides, exoesqueletos motorizados y prótesis de pierna podrían usar bucles reflejos similares para recuperarse rápidamente cuando tropiecen, dando tiempo a los sistemas de toma de decisiones más lentos para reaccionar. Este trabajo sugiere que tomar prestados los circuitos reflejos más sencillos del cuerpo y embebiéndolos en hardware similar a músculos puede acercar mucho a las piernas diseñadas a la agilidad y seguridad del movimiento humano.
Cita: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
Palabras clave: pierna biorrobótica, reflejo rotuliano, robótica blanda, músculos artificiales neumáticos, locomoción humanoide