Clear Sky Science · it
Sinfonia sinaptica: orchestrazione di un arco riflesso monosinaptico esplicito per movimenti autonomi in una gamba biorobotica
Perché un robot con riflesso rotuleo è importante
Il colpetto familiare sotto il ginocchio che fa balzare la gamba non è solo un trucco da ambulatorio: è una delle reazioni automatiche più rapide del corpo e ci aiuta a restare in equilibrio quando il terreno cambia inaspettatamente. Questo articolo mostra come gli scienziati hanno costruito una gamba robotica che riproduce questo riflesso rotuleo in modo così fedele che, basandosi solo sulle misure, è difficile distinguerla da una gamba umana. Una tale svolta potrebbe rendere i futuri robot umanoidi, esoscheletri e protesi più stabili, reattivi e confortevoli nell’uso quotidiano.
Dai muscoli morbidi a una gamba robotica credibile
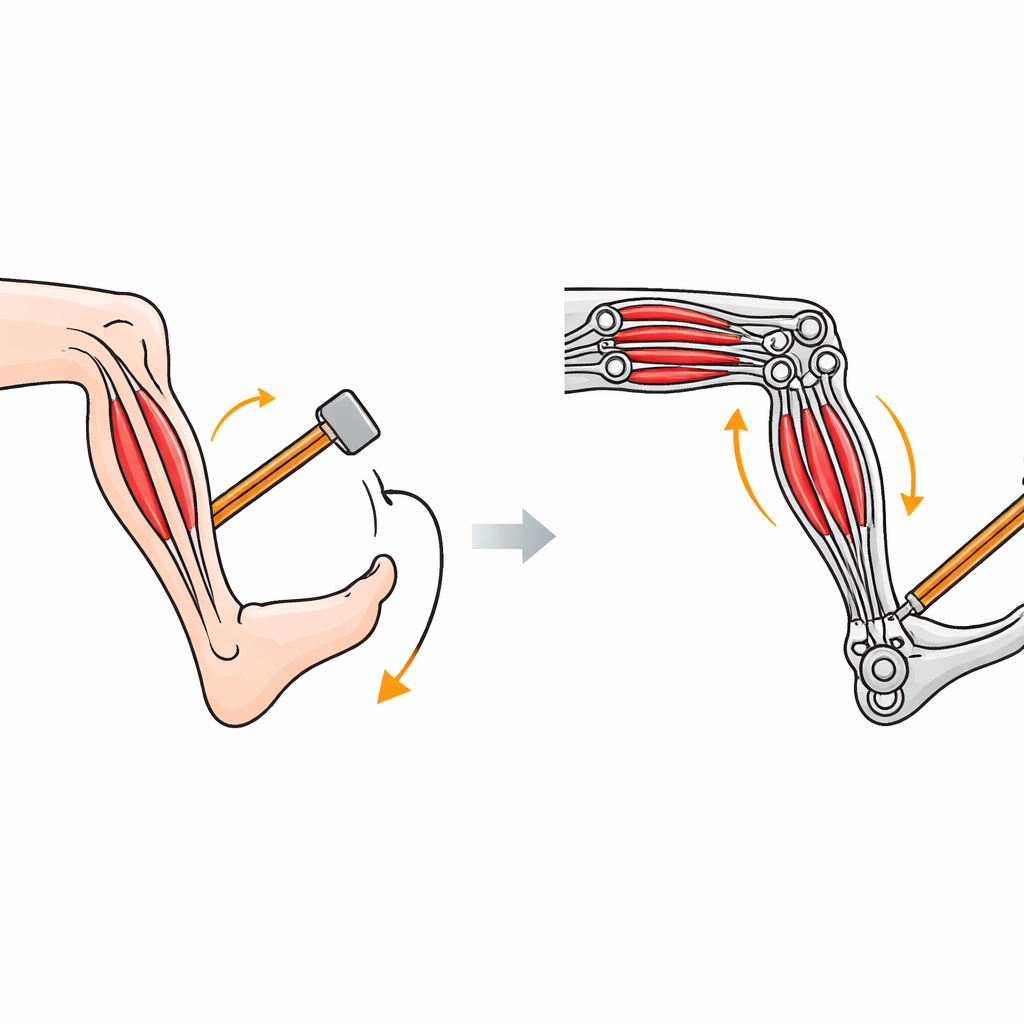
I ricercatori hanno progettato una gamba artificiale destra che segue da vicino l’anatomia umana: anche, coscia, rotula, tibia e piede con peso e comportamento articolare realistici. Invece di motori rigidi, hanno usato quattro “muscoli” pneumatici che si accorciano quando vengono riempiti d’aria pressurizzata, in modo simile alle fibre muscolari biologiche. Un’articolazione del ginocchio sagomata appositamente e il percorso della rotula fanno sì che le forze e i movimenti attraversino la gamba nello stesso modo in cui avviene nelle persone, così che anche piccole perturbazioni al tendine sotto la rotula producano un allungamento realistico dei muscoli artificiali.
Ascoltare i muscoli come fa il corpo
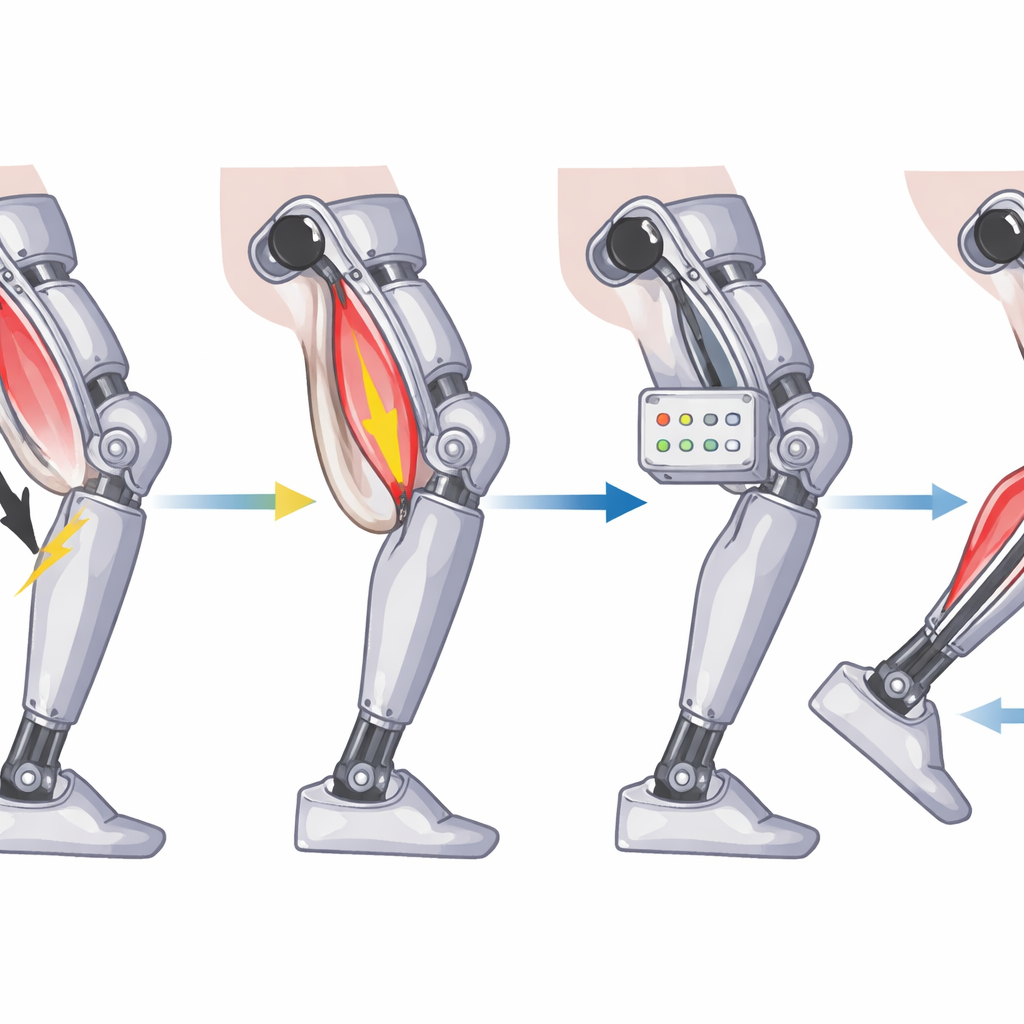
Nei nostri corpi, minuscoli sensori all’interno dei muscoli rilevano l’allungamento e la sua velocità e inviano segnali attraverso una singola connessione nel midollo spinale — l’arco riflesso monosinaptico — per innescare una rapida contrazione. Il team ha imitato questo percorso incorporando sensori di allungamento dentro ciascun muscolo artificiale. Quando un colpetto controllato con un martelletto allunga i muscoli pneumatici tramite il tendine, i sensori inviano un segnale elettrico a un controller semplice, che lo traduce in variazioni di pressione dell’aria. I muscoli si contraggono quindi, facendo oscillare la parte inferiore della gamba, proprio come avviene con il quadricipite nel riflesso rotuleo umano.
Mettere robot e umani alla stessa prova
Per verificare quanto il robot si avvicinasse alle persone, gli scienziati hanno eseguito esperimenti identici su 14 volontari umani e sulla gamba biorobotica. In tutti i casi, un martello montato su un pendolo colpiva il tendine da diversi angoli di partenza, producendo colpi ripetibili. Sugli esseri umani hanno registrato l’attività muscolare con elettrodi di superficie e tracciato il movimento della gamba con telecamere ad alta velocità. Sul robot hanno registrato i segnali dei sensori, la pressione dell’aria e il movimento delle articolazioni. Hanno quindi confrontato i tempi chiave: quanto tempo impiegava il martello a raggiungere la massima indentazione, quanto rapidamente appariva il primo segnale riflesso, quanto tempo passava prima che la gamba iniziasse a muoversi e quanto tempo prima che il ginocchio raggiungesse il suo angolo massimo.
Tempi, movimento e un vantaggio meccanico nascosto
Il modello di riflesso complessivo del robot — quanto e quanto velocemente il ginocchio si piegava — rientrava pienamente nell’intervallo osservato nei soggetti umani per tutte le intensità di colpo. Anche la tempistica degli eventi meccanici, dall’impatto del martello all’oscillazione massima della gamba, seguiva da vicino i valori umani, nonostante i segnali elettrici nel robot viaggino molto più rapidamente degli impulsi nervosi. Parte di questa corrispondenza deriva dall’articolazione del ginocchio e dal percorso della rotula accuratamente sagomati, che creano un braccio di leva dipendente dall’angolo. In prossimità di angoli del ginocchio quasi distesi, piccoli cambiamenti nell’angolo producono variazioni maggiori nella lunghezza del muscolo, rendendo il riflesso particolarmente sensibile quando siamo più a rischio di inciampare o fare un passo falso. Questo “amplificatore” meccanico incorporato è un esempio di ciò che gli ingegneri chiamano intelligenza incorporata: comportamento intelligente che nasce dalla forma e dai materiali del corpo, non solo dal software.
Cosa significa questo per le macchine che camminano in futuro
Mostrando che una gamba robotica morbida, azionata da muscoli, può riprodurre il riflesso rotuleo umano quasi in modo indistinguibile, lo studio fornisce una guida per costruire macchine con gambe più naturali e robuste. Invece di affidarsi soltanto a pesanti calcoli e a controlli di alto livello, i futuri robot umanoidi, esoscheletri attivi e protesi potrebbero usare anelli riflessi simili per riprendersi rapidamente da una caduta, dando tempo ai sistemi decisionali più lenti di reagire. Questo lavoro suggerisce che prendere in prestito i circuiti riflessi più semplici del corpo e integrarli in hardware simile a muscoli può avvicinare notevolmente le gambe ingegnerizzate all’agilità e alla sicurezza del movimento umano.
Citazione: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
Parole chiave: gamba biorobotica, riflesso del ginocchio, robotica morbida, muscoli artificiali pneumatici, locomozione umanoide