Clear Sky Science · de
Synaptische Symphonie: Orchestrierung eines expliziten monosynaptischen Reflexbogens für autonome Bewegungen in einem biorobotischen Bein
Warum ein Kniezucken-Roboter wichtig ist
Der vertraute Schlag unterhalb der Kniescheibe, der Ihr Bein aufspringen lässt, ist mehr als ein ärztlicher Trick — er ist eine der schnellsten automatischen Reaktionen des Körpers und hilft uns, das Gleichgewicht zu halten, wenn sich der Untergrund unerwartet verändert. Diese Studie zeigt, wie Forscher ein Roboterbein gebaut haben, das diesen Knie-Reflex so getreu nachbildet, dass man anhand der Messungen kaum noch zwischen ihm und einem menschlichen Bein unterscheiden kann. Ein solcher Durchbruch könnte künftige Humanoide, Exoskelette und Prothesen stabiler, reaktionsschneller und alltagsnäher im Gebrauch machen.
Von weichen Muskeln zu einem lebensechten Roboterbein
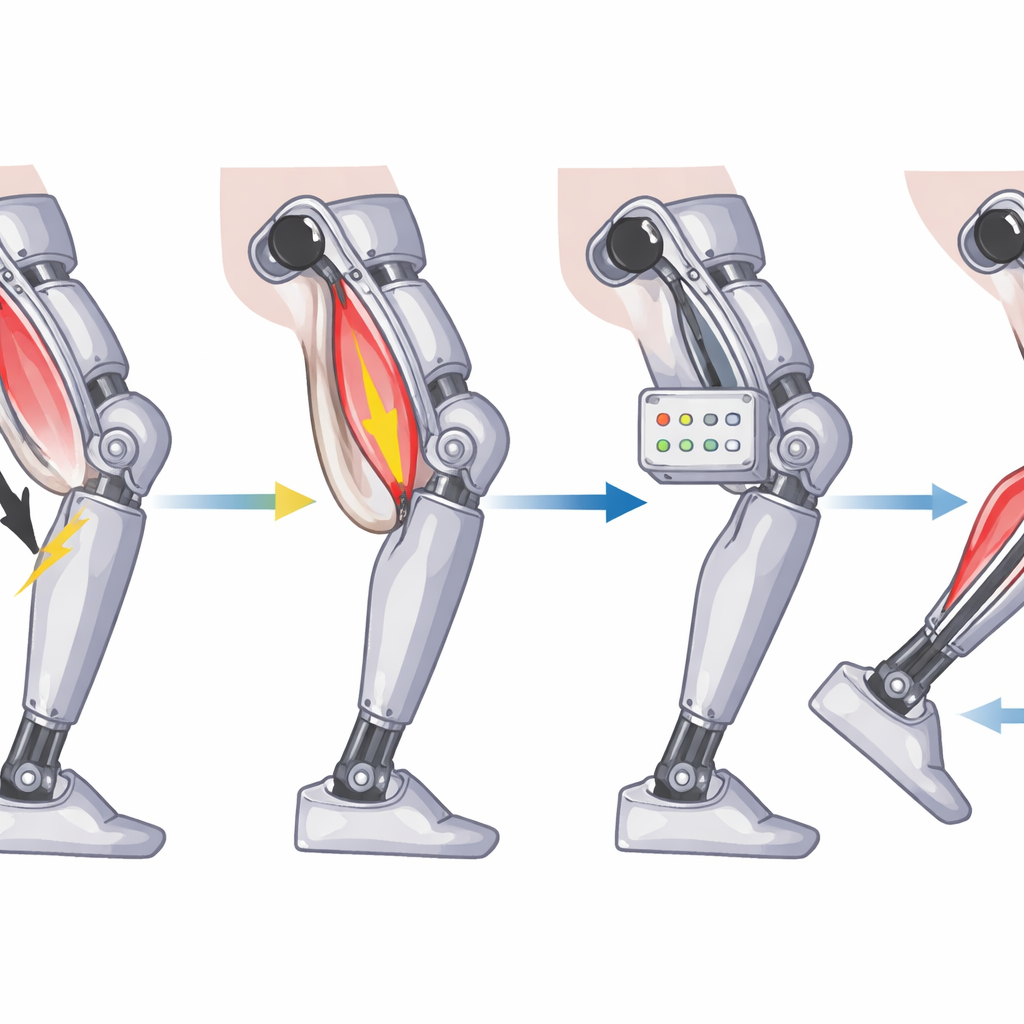
Die Forschenden entwarfen ein künstliches rechtes Bein, das der menschlichen Anatomie eng folgt: Hüfte, Oberschenkel, Kniescheibe, Schienbein und Fuß mit realistischem Gewicht und Gelenkverhalten. Statt starrer Motoren verwendeten sie vier pneumatische „Muskeln“, die sich verkürzen, wenn Druckluft sie füllt — ähnlich wie biologische Muskelfasern. Ein speziell geformtes Kniegelenk und die Führung der Kniescheibe sorgen dafür, dass Kräfte und Bewegungen auf dieselbe Weise durch das Bein laufen wie beim Menschen, sodass selbst kleine Störungen an der Sehne unterhalb der Kniescheibe zu realistischer Dehnung der künstlichen Muskeln führen.
Den Muskeln zuhören — wie der Körper es tut
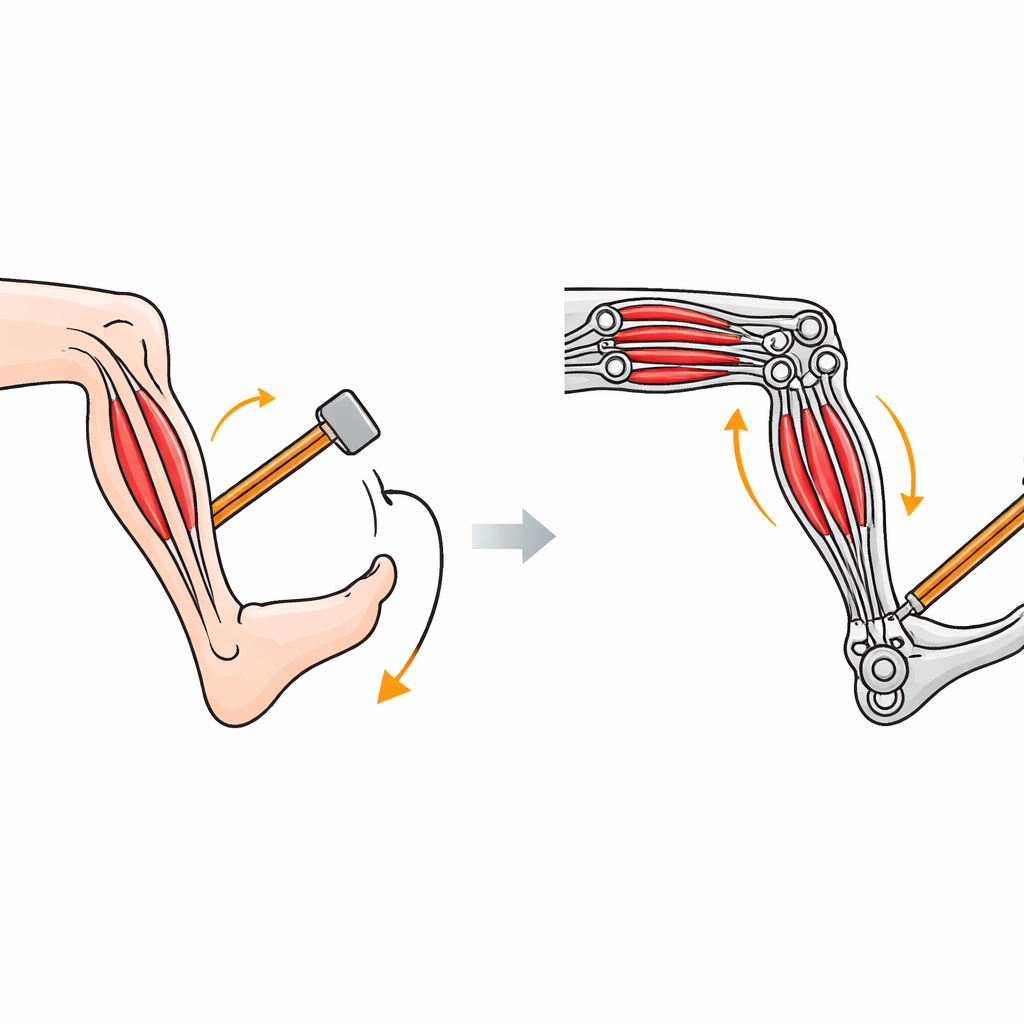
In unserem Körper erkennen winzige Sensoren in den Muskeln Dehnung und Dehnungsgeschwindigkeit und senden Signale über eine einzige Verbindung im Rückenmark — den monosynaptischen Reflexbogen — aus, um eine schnelle Kontraktion auszulösen. Das Team ahmte diesen Weg nach, indem es Dehnungssensoren in jeden künstlichen Muskel einbaute. Wenn ein kontrollierter Hammerstoß die pneumatischen Muskeln über die Sehne dehnt, senden die Sensoren ein elektrisches Signal an einen einfachen Regler, der dies in Änderungen des Luftdrucks übersetzt. Die Muskeln kontrahieren dann und schwingen das Unterschenkelsegment, genau wie der Quadrizeps beim menschlichen Knie-Reflex.
Roboter und Menschen im selben Test
Um zu prüfen, wie eng der Roboter den Menschen nachbildet, führten die Wissenschaftler identische Experimente mit 14 menschlichen Probanden und dem biorobotischen Bein durch. In allen Fällen traf ein pendelnd aufgehängter Hammer die Sehne aus mehreren Startwinkeln und erzeugte reproduzierbare Schläge. Bei den Menschen zeichneten sie Muskelaktivität mit Oberflächenelektroden auf und verfolgten die Beinbewegung mit Hochgeschwindigkeitskameras. Beim Roboter protokollierten sie Sensorsignale, Luftdruck und Gelenkbewegungen. Anschließend verglichen sie zentrale Zeitpunkte: wie lange der Hammer brauchte, um die maximale Eindrückung zu erreichen, wie schnell das erste Reflexsignal auftauchte, wie lange es dauerte, bis das Bein zu bewegen begann, und wie lange bis das Knie seinen Spitzenwinkel erreichte.
Timing, Bewegung und ein verborgenes mechanisches Mehr an Nutzen
Das gesamte Reflexmuster des Roboters — wie weit und wie schnell das Knie beugte — lag für alle Schlagstärken deutlich im Bereich der beobachteten menschlichen Werte. Auch die zeitliche Abfolge mechanischer Ereignisse, vom Hammeraufprall bis zum maximalen Ausschlag des Beins, folgte eng den menschlichen Messwerten, obwohl die elektrischen Signale im Roboter weit schneller sind als Nervenimpulse. Ein Teil dieser Übereinstimmung resultiert aus dem sorgfältig geformten Kniegelenk und der Kniescheibenführung, die einen winkelabhängigen Hebelarm erzeugen. Bei nahezu gestreckten Kniewinkeln führen kleine Änderungen des Winkels zu größeren Änderungen der Muskellänge, wodurch der Reflex besonders empfindlich wird, genau dann, wenn wir am stärksten von einem Stolpern oder Fehltritt gefährdet sind. Dieser eingebaute mechanische „Verstärker“ ist ein Beispiel für das, was Ingenieure als Embodied Intelligence bezeichnen: intelligentes Verhalten, das aus Körperform und Materialeigenschaften entsteht, nicht nur aus Software.
Was das für künftige Laufmaschinen bedeutet
Indem die Studie zeigt, dass ein weiches, muskelgetriebenes Roboterbein den menschlichen Knie-Reflex nahezu ununterscheidbar nachbilden kann, liefert sie einen Bauplan für natürlichere und robustere Beingeräte. Anstatt sich allein auf aufwändige Berechnungen und hochrangige Steuerungen zu verlassen, könnten künftige humanoide Roboter, angetriebene Exoskelette und Prothesen ähnliche Reflexschleifen nutzen, um sich bei einem Stolpern schnell abzufangen und den langsameren Entscheidungsprozessen Zeit zum Reagieren zu geben. Die Arbeit legt nahe, dass das Übernehmen der einfachsten Reflexschaltungen des Körpers und deren Einbettung in muskelähnliche Hardware ingenieursmäßigen Beinen einen großen Schritt näher an die Wendigkeit und Sicherheit menschlicher Bewegung bringen kann.
Zitation: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
Schlüsselwörter: biorobotisches Bein, Knie-Reflex, weiche Robotik, pneumatische künstliche Muskeln, humanoide Fortbewegung