Clear Sky Science · ja
シナプティック・シンフォニー:バイオロボット脚における自律運動のための明示的単シナプス反射弧のオーケストレーション
なぜ膝反射ロボットが重要なのか
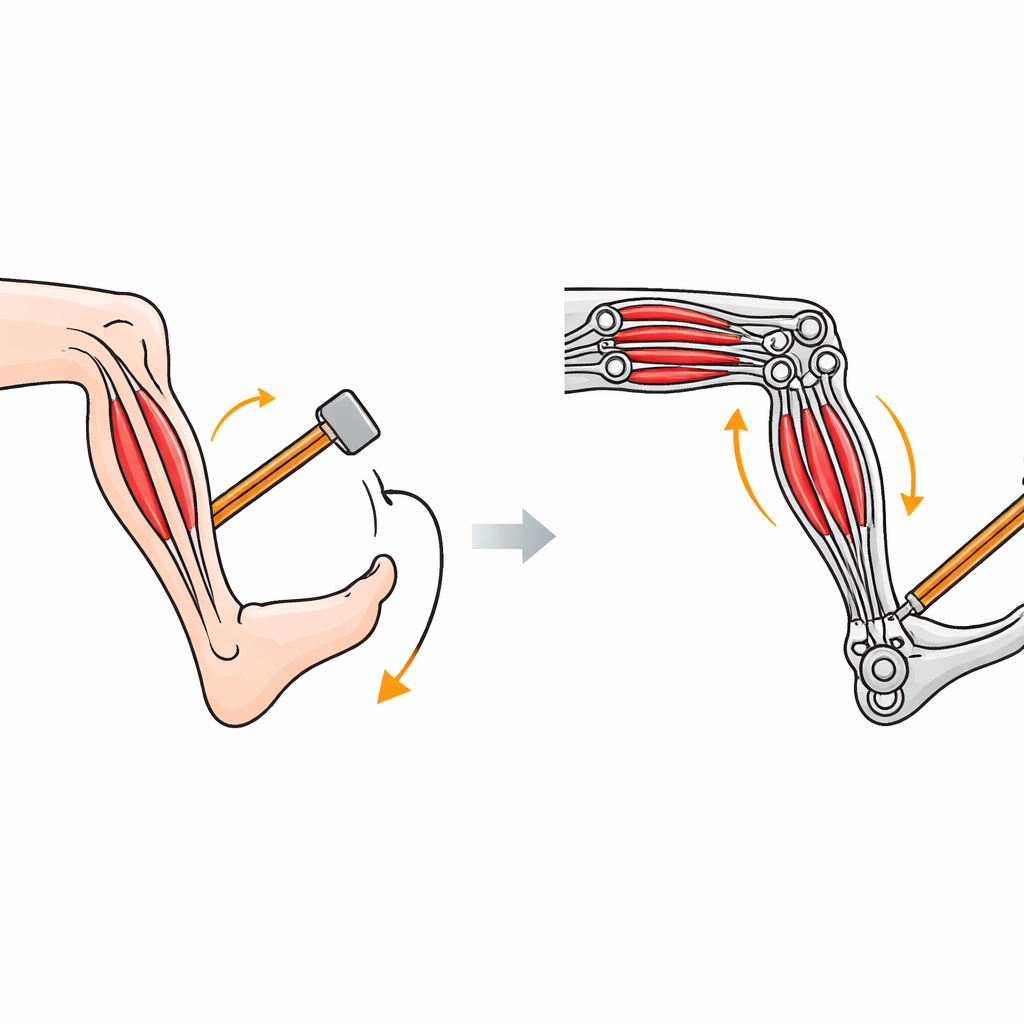
ひざ下へのおなじみの軽い一撃で脚が跳ね上がる反応は、ただの診察の小技以上のものです。これは地面が予期せず動いたときに私たちが直立を保つのを助ける、体内で最も速い自動反応のひとつです。本論文は、科学者たちがこの膝反射を非常に忠実に再現するロボット脚を構築した経緯を示しており、測定結果だけを見ても人間の脚とほとんど区別がつかないほどです。このような画期的な成果は、将来のヒューマノイドロボット、外骨格、義足をより安定して応答性の高い、使いやすいものにする可能性があります。
ソフトな筋肉から生きたようなロボット脚へ
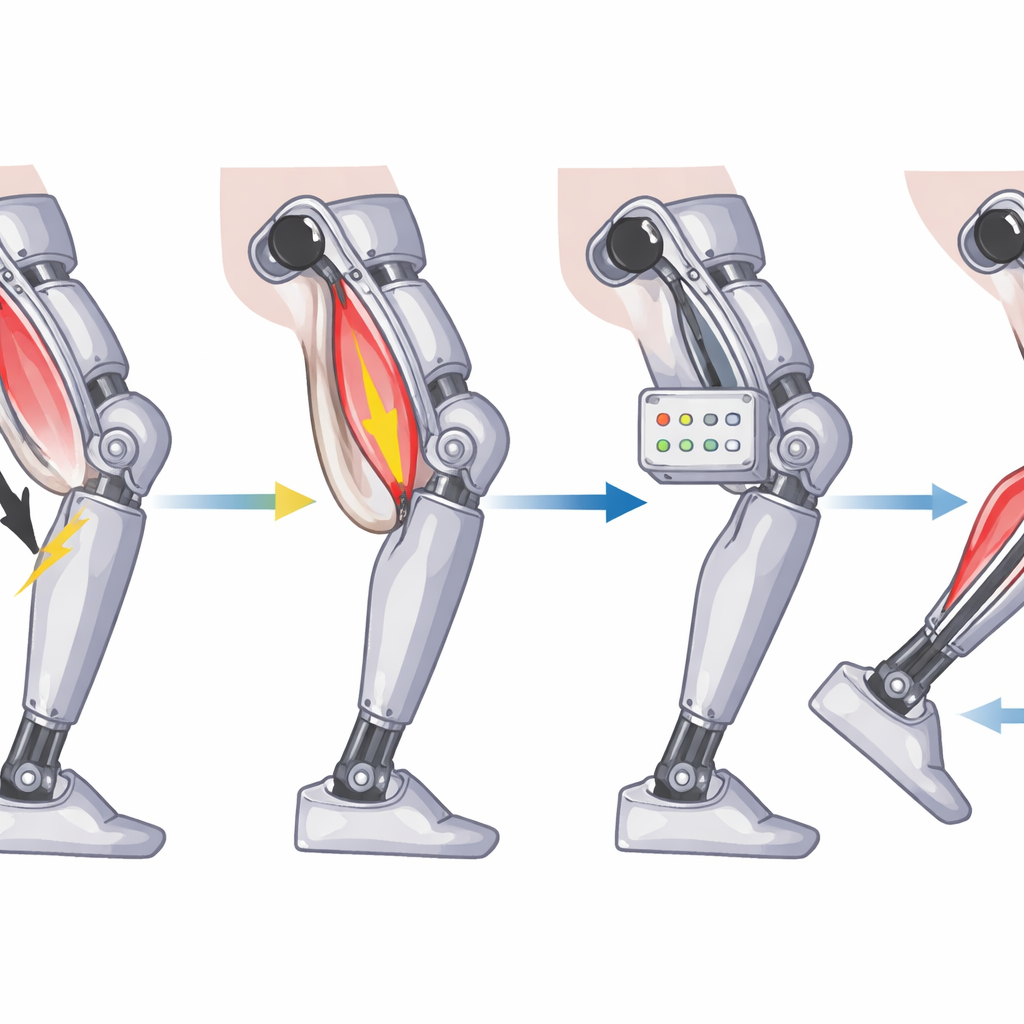
研究チームは、股関節、太もも、膝蓋骨、脛、足といった人間の解剖に近い人工右脚を設計しました。剛性のあるモーターの代わりに、空気で膨らむと短くなる4本の空気圧“筋肉”を用い、生体の筋線維のように収縮します。特別に成形された膝関節と膝蓋骨の取り回しにより、力と運動が人間と同じ経路で脚に伝わるため、膝蓋腱下の小さな摂動でも人工筋の現実的な伸張を引き起こします。
体が筋肉を“聞く”方法を再現する
私たちの体内では、筋肉内の小さなセンサーが伸張とその速度を検出し、単一の脊髄接続である単シナプス反射弧を通じて信号を送り、迅速な収縮を引き起こします。研究チームはこれを模倣し、各人工筋の内部に伸張センサーを埋め込みました。制御されたハンマーの打撃が腱を介して空気圧筋を伸ばすと、センサーは電気信号を単純なコントローラーに送ります。コントローラーはそれを空気圧の変化に変換し、筋肉が収縮して下腿を振り、ヒトの膝反射での大腿四頭筋と同様の動作を生み出します。
ロボットと人間を同じ試験にかける
ロボットがどれほど人間に近いかを評価するため、研究者たちは14人の被験者とバイオロボット脚で同一の実験を実施しました。すべての場合で振り子に取り付けたハンマーが複数の初期角度から腱を打ち、再現性のある打撃を生み出しました。人間では表面電極で筋活動を記録し、高速カメラで脚の動きを追跡しました。ロボットではセンサー信号、空気圧、関節の動きを記録しました。そこから主要なタイミングを比較しました:ハンマーが最大の押し込みに達するまでの時間、最初の反射信号が現れる速さ、脚が動き出すまでの時間、膝が最大角に達するまでの時間です。
タイミング、運動、そして隠れた機械的有利さ
ロボットの全体的な反射パターン――膝がどれだけ、どれだけ速く曲がるか――は、すべての打撃強度において被験者で観察された範囲内に収まりました。ハンマー衝撃から最大振り子運動までの機械的事象のタイミングも、人間の値に非常に近似しました。これはロボット内の電気信号が神経インパルスよりずっと速く伝わるにもかかわらず成り立っています。この一致の一部は、膝関節と膝蓋骨の細かく設計された形状によるもので、角度依存のてこの腕を生み出します。ほぼ伸びきった膝角付近では、膝角の小さな変化が筋長のより大きな変化を生み、つまずきや踏み外しのリスクが高いときに反射が特に敏感になります。この内蔵された機械的“増幅器”は、単にソフトウェアだけでなく、体の形状や素材から生じる賢い振る舞い、すなわちエンボディド・インテリジェンスの一例です。
将来の歩行機械にとっての意義
軟らかく筋肉駆動のロボット脚が人間の膝反射をほとんど区別できないほどに再現できることを示したことで、この研究はより自然で堅牢な脚型機械を作るための設計図を提供します。重い計算や高次制御に頼る代わりに、将来のヒューマノイド、動力付き外骨格、義足は同様の反射ループを用いてつまずいた際に素早く姿勢を回復し、遅い意思決定システムに余裕を与えることができるでしょう。本研究は、体の最も単純な反射回路を取り入れ、筋肉のようなハードウェアに埋め込むことで、工学的に作られた脚が人間の運動の機敏さと安全性に大きく近づけることを示唆しています。
引用: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
キーワード: バイオロボット脚, 膝反射, ソフトロボティクス, 空気圧人工筋, ヒューマノイド歩行