Clear Sky Science · pt
Sinfonia sináptica: orquestração de um arco reflexo monossináptico explícito para movimentos autônomos em uma perna biorrobótica
Por que um robô com reflexo patelar importa
O conhecido toque abaixo do joelho que faz a perna pular é mais do que um truque clínico — é uma das reações automáticas mais rápidas do corpo, ajudando-nos a manter a postura quando o chão se move inesperadamente. Este artigo mostra como cientistas construíram uma perna robótica que reproduz fielmente esse reflexo patelar a tal ponto que, com base apenas nas medições, é difícil distingui-la de uma perna humana. Essa conquista poderia tornar futuros robôs humanoides, exoesqueletos e próteses mais estáveis, responsivos e confortáveis no uso diário.
De músculos macios a uma perna robótica com aparência de vida
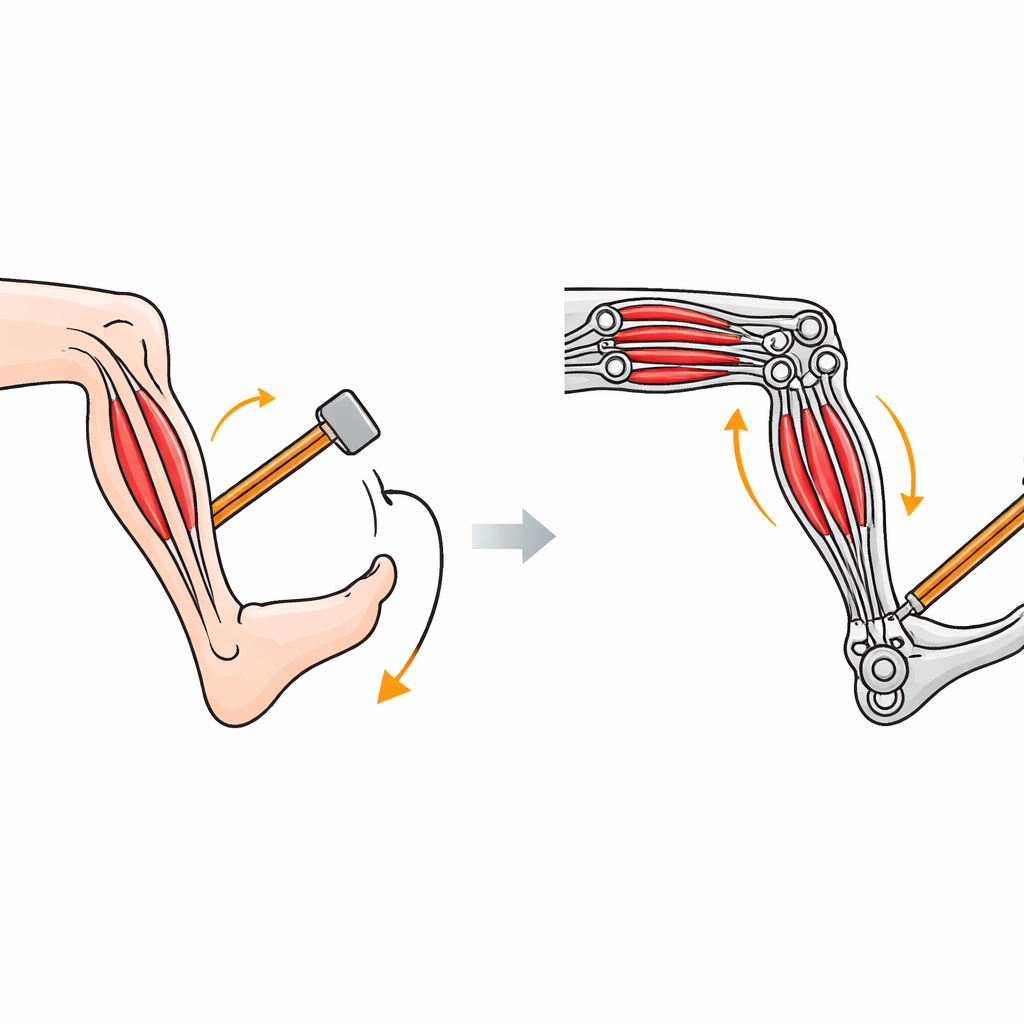
Os pesquisadores projetaram uma perna direita artificial que segue de perto a anatomia humana: quadril, coxa, patela, canela e pé, com peso e comportamento articular realistas. Em vez de motores rígidos, usaram quatro “músculos” pneumáticos que encurtam quando ar pressurizado os preenche, muito parecido com as fibras musculares biológicas. Uma articulação de joelho especialmente moldada e o encaminhamento da patela garantem que forças e movimentos atravessam a perna da mesma forma que em pessoas, de modo que até pequenas perturbações no tendão abaixo da patela conduzam a um alongamento realista dos músculos artificiais.
Ouvindo músculos do mesmo modo que o corpo
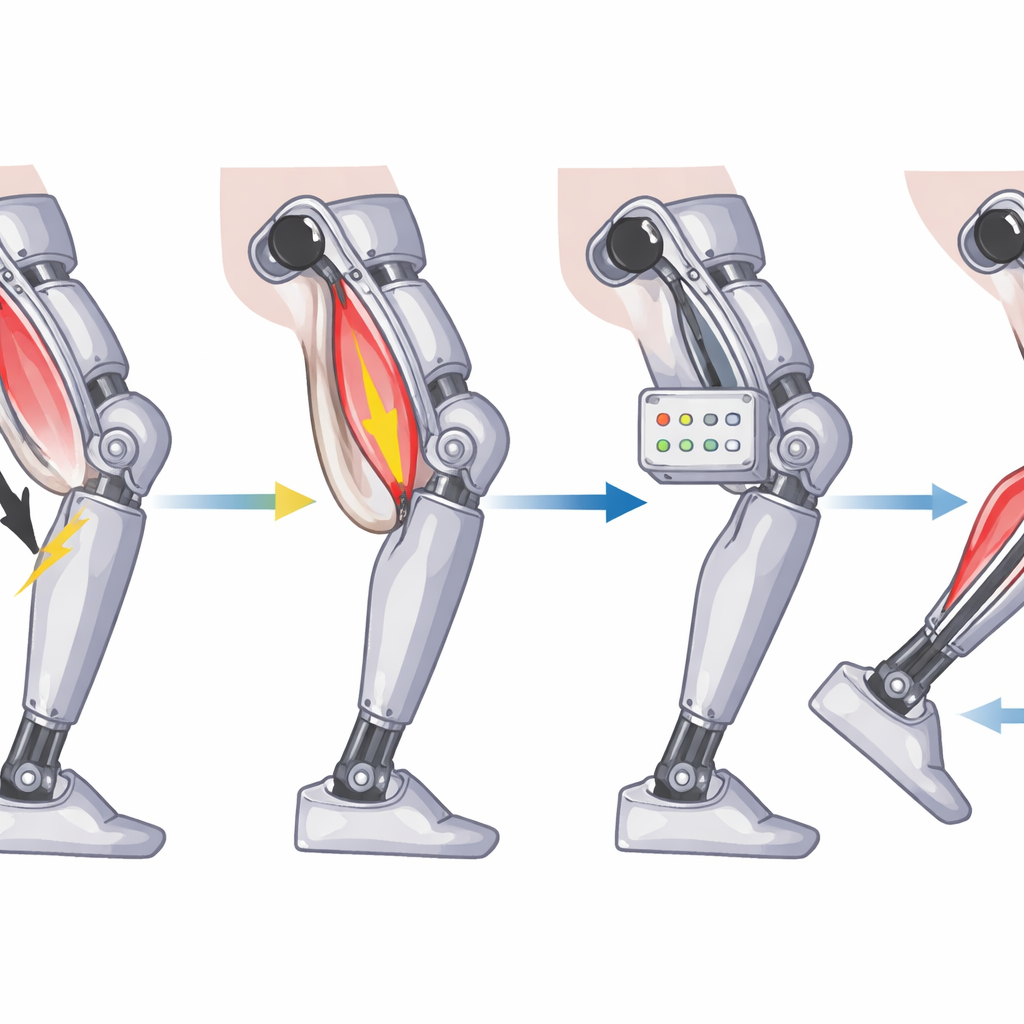
No nosso corpo, sensores minúsculos dentro dos músculos detectam o alongamento e a velocidade desse alongamento e enviam sinais por meio de uma única conexão na medula — o arco reflexo monossináptico — para desencadear uma contração rápida. A equipe imitou esse caminho incorporando sensores de alongamento dentro de cada músculo artificial. Quando um martelo controlado estica os músculos pneumáticos via tendão, os sensores enviam um sinal elétrico para um controlador simples, que o traduz em mudanças na pressão do ar. Os músculos então se contraem, balançando a perna inferior, assim como o quadríceps faz no reflexo patelar humano.
Submetendo robô e humanos ao mesmo teste
Para avaliar quão próximo o robô ficava das pessoas, os cientistas realizaram experimentos idênticos com 14 voluntários humanos e com a perna biorrobótica. Em todos os casos, um martelo montado em um pêndulo atingia o tendão a partir de vários ângulos iniciais, produzindo batidas repetíveis. Nos humanos, registraram a atividade muscular com eletrodos de superfície e rastrearam o movimento da perna com câmeras de alta velocidade. No robô, registraram sinais dos sensores, pressão do ar e movimento articular. Em seguida, compararam tempos chave: quanto tempo o martelo levou para atingir a indentação máxima, quão rapidamente apareceu o primeiro sinal reflexo, quanto tempo até a perna começar a se mover e quanto tempo até o joelho alcançar seu ângulo máximo.
Tempos, movimento e uma vantagem mecânica oculta
O padrão reflexo geral do robô — o quanto e quão rápido o joelho dobrou — situou-se firmemente dentro da faixa observada em sujeitos humanos para todas as intensidades de batida. O tempo dos eventos mecânicos, do impacto do martelo ao balanço máximo da perna, também seguiu de perto os valores humanos, mesmo que os sinais elétricos no robô viajem muito mais rápido do que os impulsos nervosos. Parte dessa correspondência vem da articulação do joelho e do encaminhamento da patela cuidadosamente projetados, que criam um braço de alavanca dependente do ângulo. Perto de ângulos de joelho quase estendidos, pequenas mudanças no ângulo do joelho produzem alterações maiores no comprimento do músculo, tornando o reflexo especialmente sensível quando estamos mais em risco de tropeçar ou pisar em falso. Esse “amplificador” mecânico embutido é um exemplo do que os engenheiros chamam de inteligência incorporada: comportamento inteligente que emerge da forma e dos materiais do corpo, não apenas do software.
O que isso significa para máquinas de andar no futuro
Ao demonstrar que uma perna robótica macia, acionada por músculos, pode reproduzir o reflexo patelar humano quase de forma indistinguível, o estudo fornece um roteiro para construir máquinas com pernas mais naturais e robustas. Em vez de depender apenas de computação pesada e controle de alto nível, futuros robôs humanoides, exoesqueletos motorizados e próteses poderiam usar laços reflexos semelhantes para se recuperar rapidamente ao tropeçar, dando tempo para sistemas de tomada de decisão mais lentos reagirem. Este trabalho sugere que emprestar os circuitos reflexos mais simples do corpo e incorporá-los em hardware semelhante a músculos pode aproximar muito as pernas projetadas da agilidade e segurança do movimento humano.
Citação: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
Palavras-chave: perna biorrobótica, reflexo do joelho, robótica suave, músculos artificiais pneumáticos, locomoção humanoide