Clear Sky Science · ar
سيمفونية المشابك: تنسيق قوس منعكس أحادي المشبك صريح لحركات مستقلة في ساق بيو-روبوتية
لماذا يهم وجود روبوت بمخض الركبة
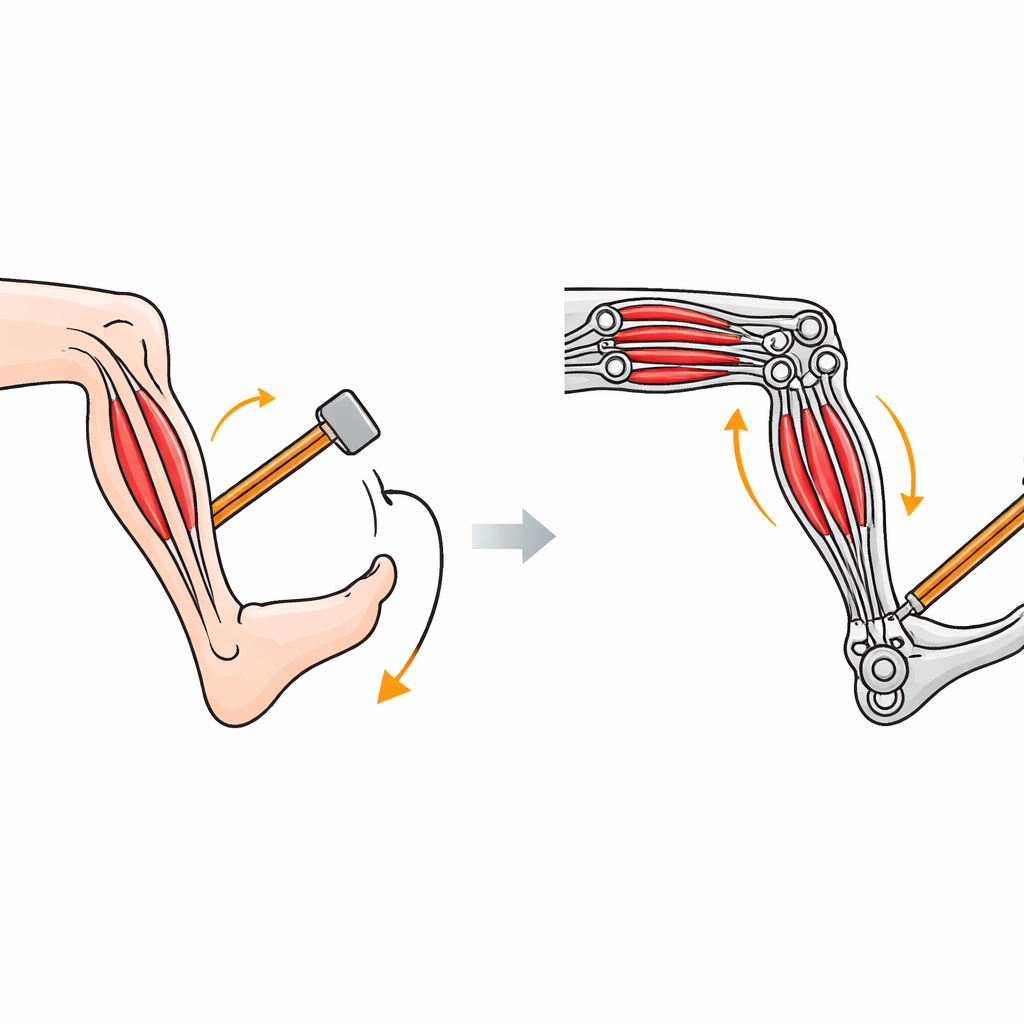
الدفعة المألوفة تحت الركبة التي تجعل ساقك تقفز ليست مجرد خدعة طبية—بل هي واحدة من أسرع ردود الفعل التلقائية في الجسم، وتساعدنا على البقاء منتصبين عندما يتغير سطح الأرض فجأة. توضح هذه الورقة كيف بنى العلماء ساقًا روبوتيةً تعيد إنتاج هذا المنعكس بدقة بحيث لا يمكنك، اعتمادًا على القياسات وحدها، التمييز بينها وبين ساق إنسانية. مثل هذا الاختراق قد يجعل الروبوتات الشبيهة بالبشر والهيكليات الخارجية والأطراف الاصطناعية أكثر ثباتًا واستجابةً وراحةً للاستخدام اليومي.
من العضلات اللينة إلى ساق روبوتية تشبه الحياة
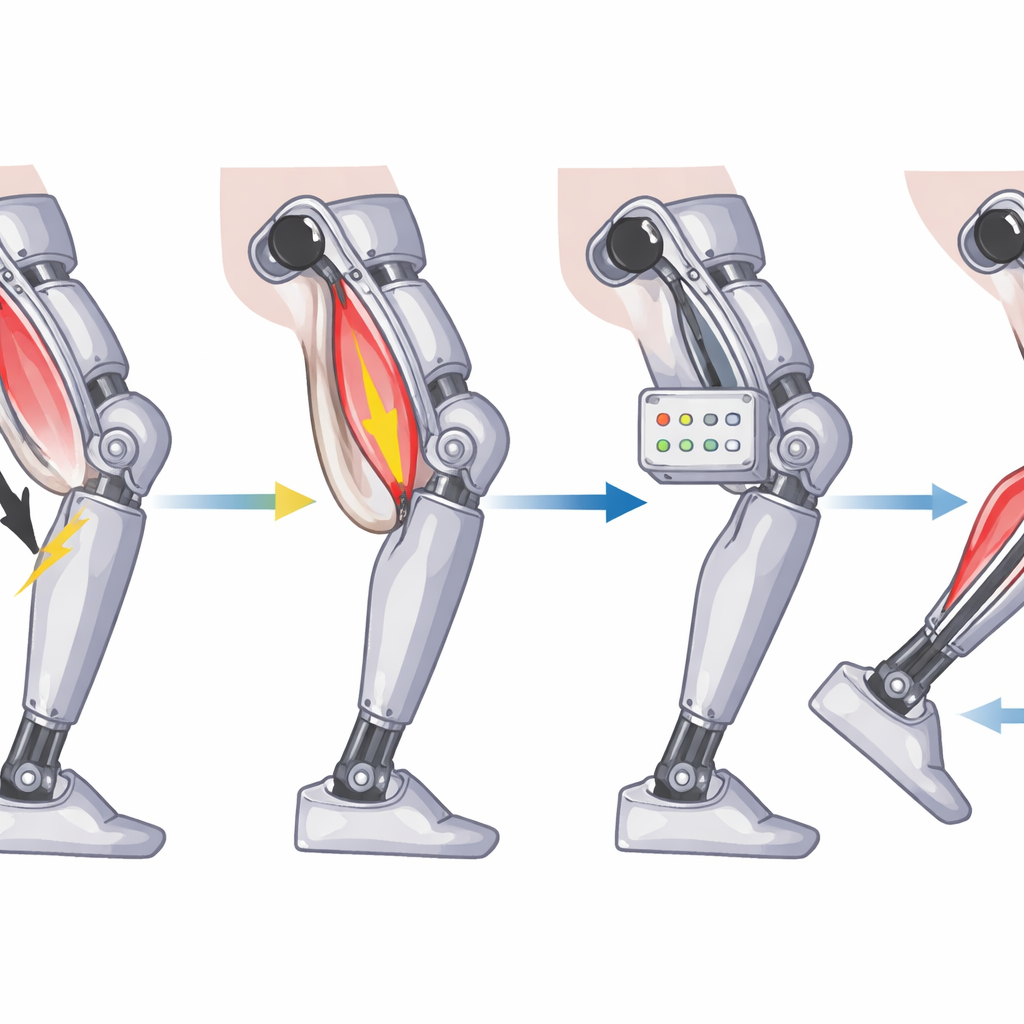
صمم الباحثون ساقًا صناعية يمنى تحاكي تشريح الإنسان عن كثب: الورك والفخذ والرضفة والساق والقدم بوزن وسلوك مفصلي واقعيين. بدلًا من المحركات الصلبة، استخدموا أربع "عضلات" هوائية تقصر عندما يملؤها الهواء المضغوط، تمامًا مثل ألياف العضلات البيولوجية. مفصل ركبة مُشَكّل بطريقة خاصة ومسار للرضفة يضمنان أن القوى والحركات تمر عبر الساق بنفس الطريقة التي تحدث عند الإنسان، بحيث تؤدي الاضطرابات الصغيرة عند الوتر أسفل الرضفة إلى تمدد واقعي للعضلات الصناعية.
الاستماع إلى العضلات كما يفعل الجسم
في أجسامنا، تقيس مجسات صغيرة داخل العضلات مقدار التمدد وسرعته وترسل إشارات عبر اتصال وحيد في الحبل الشوكي—قوس المنعكس الأحادي المشبك—لإحداث انقباض سريع. قلدت المجموعة هذا المسار بزرع مجسات تمدد داخل كل عضلة صناعية. عندما يمدّ المطرقة المتحكم بها العضلات الهوائية عبر الوتر، ترسل المجسات إشارة كهربائية إلى متحكم بسيط، يترجمها إلى تغييرات في ضغط الهواء. ثم تنقبض العضلات، موجّهةً الطرف السفلي من الساق كما يفعل عضلة الفخذ الرباعية في منعكس الركبة لدى الإنسان.
وضع الروبوت والبشر على نفس الاختبار
لمعرفة مدى تقارب الروبوت من البشر، أجرى العلماء تجارب متطابقة على 14 متطوعًا بشريًا وعلى الساق البايو-روبوتية. في جميع الحالات، كانت المطرقة المعلقة بندولًا تضرب الوتر من زوايا بدء متعددة، مولدةً ضربات قابلة للتكرار. بالنسبة للبشر، سجلوا نشاط العضلات باستخدام أقطاب سطحية وتعقّبوا حركة الساق بكاميرات عالية السرعة. وبالنسبة للروبوت، سجّلوا إشارات المجسات وضغط الهواء وحركة المفصل. ثم قارنوا توقيتات رئيسية: المدة التي احتاجتها المطرقة للوصول إلى أقصى انغماس، ومدى سرعة ظهور الإشارة الانعكاسية الأولى، وكم استغرق حتى بدأت الساق في التحرك، وكم استغرق حتى بلغت الركبة زاويتها القصوى.
التوقيت والحركة وميزة ميكانيكية خفية
نمط المنعكس العام للروبوت—مدى وسرعة انثناء الركبة—وقع ضمن النطاق الذي لوحظ لدى الأشخاص لجميع شدات الضربات. كما أن توقيت الأحداث الميكانيكية، من تأثير المطرقة إلى أقصى تأرجح للساق، تبع أيضًا قيم البشر عن كثب، رغم أن الإشارات الكهربائية في الروبوت تنتقل أسرع بكثير من نبضات الأعصاب. جزء من هذا التطابق يرجع إلى مفصل الركبة والرضفة المصممين بعناية، اللذين يخلقان ذراع رافعة يتغير بطول الزاوية. بالقرب من زوايا الركبة شبه المستقيمة، تؤدي تغييرات صغيرة في زاوية الركبة إلى تغييرات أكبر في طول العضلة، مما يجعل المنعكس حساسًا بشكل خاص عندما نكون أكثر عرضة للتعثر أو الخطأ في خطوة. هذا "المكبر" الميكانيكي المدمج هو مثال على ما يسميه المهندسون الذكاء المتجسد: سلوك ذكي ينبع من شكل الجسم وخصائص المواد، لا من البرمجيات وحدها.
ماذا يعني هذا لآلات المشي المستقبلية
من خلال إظهار أن ساقًا روبوتية لينة تقودها عضلات يمكنها إعادة إنتاج منعكس الركبة البشري بشكل شبه غير مميز، توفر الدراسة مخططًا لبناء آلات ساقية أكثر طبيعية ومتانة. بدلًا من الاعتماد فقط على حسابات كثيفة وتحكّم عالي المستوى، يمكن للروبوتات الشبيهة بالبشر والهيكليات الخارجية المزودة بالطاقة والأطراف الاصطناعية المستقبلية أن تستخدم حلقات منعكسية مماثلة لالتقاط نفسها بسرعة عند التعثر، مما يمنح أنظمة اتخاذ القرار البطيئة وقتًا للتفاعل. تشير هذه الدراسة إلى أن استعارة أبسط دوائر المنعكس في الجسم ودمجها في أجهزة تشبه العضلات يمكن أن تقرب الأرجل المصممة هندسيًا خطوة كبيرة نحو خفة الحركة والأمان في الحركة البشرية.
الاستشهاد: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
الكلمات المفتاحية: ساق بيو-روبوتية, منعكس الركبة, الروبوتات اللينة, عضلات صناعية هوائية, المشي الشبيه بالبشر