Clear Sky Science · fr
Symphonie synaptique : orchestration d’un arc réflexe monosynaptique explicite pour des mouvements autonomes dans une jambe biorobotique
Pourquoi un robot avec réflexe rotulien est important
La tape familière sous le genou qui fait soudainement bondir la jambe est plus qu’un tour de clinique : c’est l’une des réactions automatiques les plus rapides du corps, elle nous aide à rester droits quand le sol se dérobe. Cet article montre comment des chercheurs ont construit une jambe robotisée qui reproduit ce réflexe rotulien si fidèlement que, d’après les seules mesures, on la distingue difficilement d’une jambe humaine. Une telle avancée pourrait rendre les futurs robots humanoïdes, exosquelettes et prothèses plus stables, plus réactifs et plus confortables au quotidien.
Des muscles souples à une jambe robotique réaliste
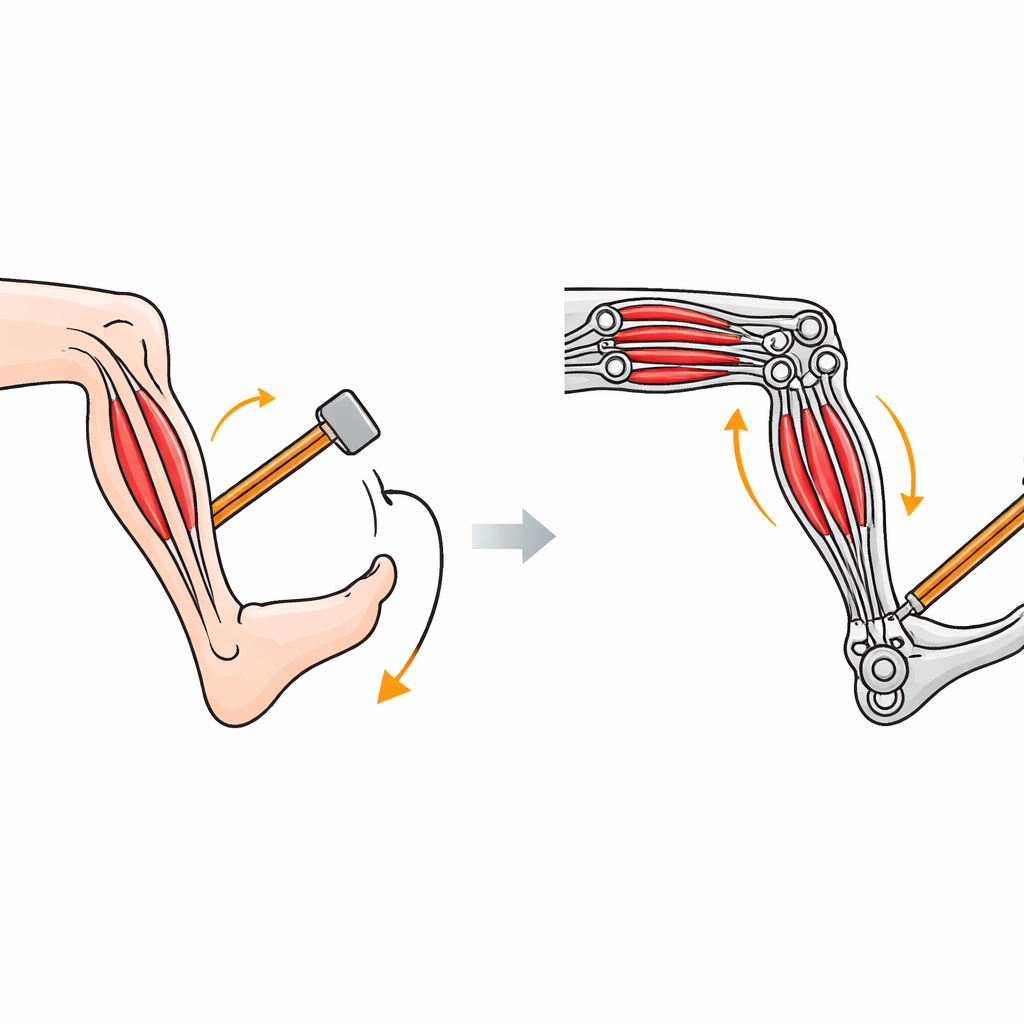
Les chercheurs ont conçu une jambe droite artificielle reproduisant fidèlement l’anatomie humaine : bassin, cuisse, rotule, tibia et pied avec des masses et des comportements articulaires réalistes. Au lieu de moteurs rigides, ils ont utilisé quatre « muscles » pneumatiques qui se raccourcissent lorsqu’on les met sous pression d’air, à la manière des fibres musculaires biologiques. Une articulation du genou spécialement profilée et un guidage de la rotule garantissent que forces et mouvements traversent la jambe comme chez l’humain, de sorte que même de petites perturbations au niveau du tendon sous la rotule entraînent un étirement réaliste des muscles artificiels.
Écouter les muscles comme le fait le corps
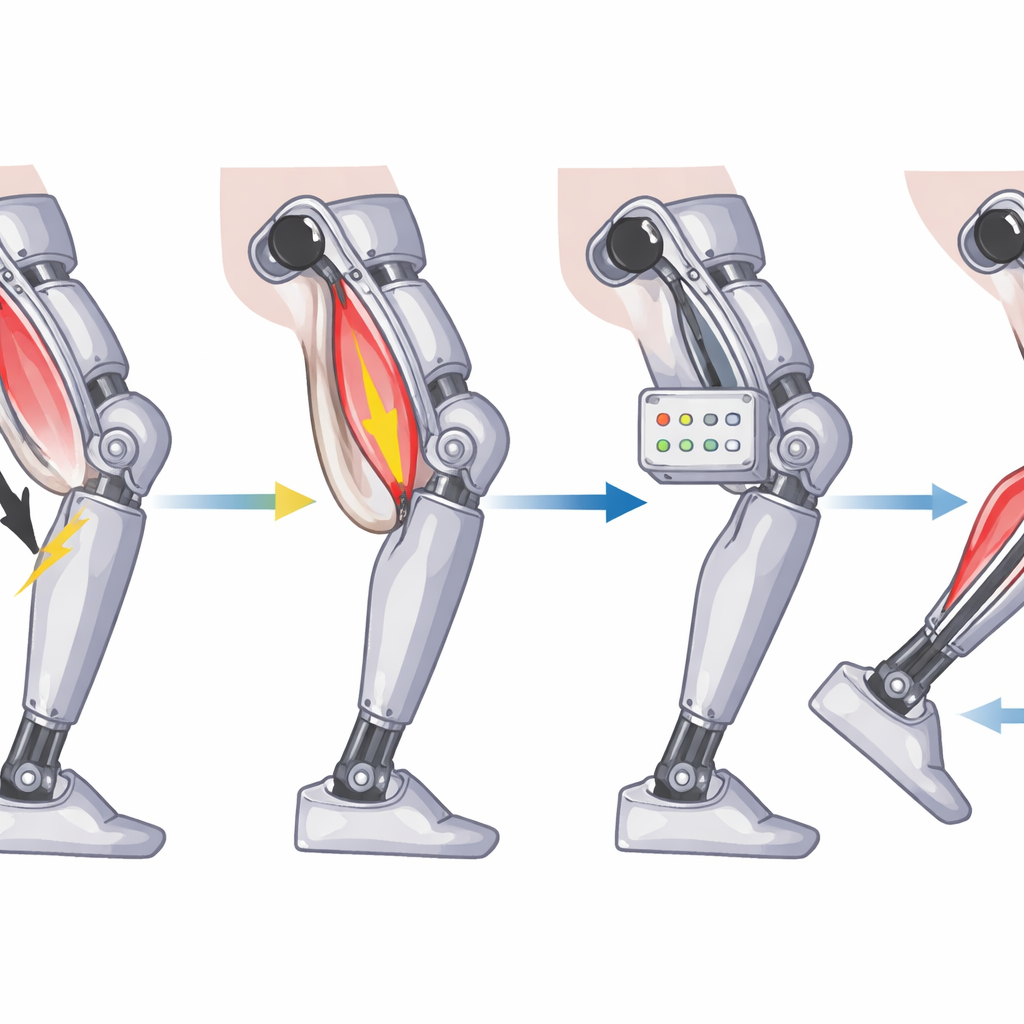
Dans nos corps, de minuscules capteurs au sein des muscles détectent l’étirement et la vitesse d’étirement et envoient des signaux par une connexion unique dans la moelle épinière — l’arc réflexe monosynaptique — pour déclencher une contraction rapide. L’équipe a reproduit ce chemin en intégrant des capteurs d’étirement dans chaque muscle artificiel. Lorsqu’un marteau contrôlé étire les muscles pneumatiques via le tendon, les capteurs envoient un signal électrique à un contrôleur simple, qui le traduit en variations de pression d’air. Les muscles se contractent alors et balancent la jambe inférieure, exactement comme le quadriceps le fait dans le réflexe rotulien humain.
Mettre le robot et les humains au même examen
Pour évaluer la similarité entre le robot et l’humain, les scientifiques ont mené des expériences identiques sur 14 volontaires humains et sur la jambe biorobotique. Dans tous les cas, un marteau monté sur un pendule frappait le tendon depuis plusieurs angles de départ, produisant des tapes reproductibles. Chez les humains, ils ont enregistré l’activité musculaire avec des électrodes de surface et suivi le mouvement de la jambe à l’aide de caméras haute vitesse. Pour le robot, ils ont enregistré les signaux des capteurs, la pression d’air et le mouvement des articulations. Ils ont ensuite comparé des temps-clés : le délai pour que le marteau atteigne la profondeur maximale d’impact, la rapidité d’apparition du premier signal réflexe, le temps avant le début du mouvement de la jambe et le délai jusqu’à l’atteinte de l’angle maximal du genou.
Chronométrage, mouvement et un avantage mécanique caché
Le profil réflexe global du robot — jusqu’où et à quelle vitesse le genou se pliait — se situait pleinement dans l’étendue observée chez les sujets humains pour toutes les forces de frappe. Le chronométrage des événements mécaniques, de l’impact du marteau au balancement maximal de la jambe, suivait également de près les valeurs humaines, bien que les signaux électriques du robot circulent beaucoup plus vite que les influx nerveux. Une partie de cette similarité vient de la forme soigneusement étudiée de l’articulation du genou et de la rotule, qui crée un bras de levier dépendant de l’angle. Autour d’angles de genou quasi-étendus, de petits changements d’angle produisent des variations plus grandes de la longueur musculaire, rendant le réflexe particulièrement sensible quand nous sommes le plus exposés au risque de trébucher ou de faire un faux pas. Cet « amplificateur » mécanique intégré illustre ce que les ingénieurs appellent l’intelligence incarnée : un comportement malin qui émerge de la forme et des matériaux du corps, pas seulement du logiciel.
Ce que cela signifie pour les machines qui marchent demain
En montrant qu’une jambe robotique souple, actionnée par des muscles, peut reproduire presque indiscernablement le réflexe rotulien humain, l’étude fournit une feuille de route pour construire des machines à pattes plus naturelles et robustes. Plutôt que de s’appuyer uniquement sur des calculs lourds et un contrôle de haut niveau, les futurs robots humanoïdes, exosquelettes motorisés et prothèses pourraient utiliser des boucles réflexes similaires pour se rattraper rapidement en cas de trébuchement, laissant aux systèmes de décision plus lents le temps de réagir. Ce travail suggère que reprendre les circuits réflexes les plus simples du corps et les intégrer dans du matériel semblable à du muscle peut rapprocher considérablement les jambes ingénierées de l’agilité et de la sécurité du mouvement humain.
Citation: Nadler, T., Stutzig, N., Haeufle, D. et al. Synaptic symphony: orchestration of an explicit monosynaptic reflex arc for autonomous movements in a biorobotic leg. npj Robot 4, 26 (2026). https://doi.org/10.1038/s44182-026-00090-3
Mots-clés: jambe biorobotique, réflexe rotulien, robotique molle, muscles artificiels pneumatiques, locomotion humanoïde