Clear Sky Science · zh
通过卷筒放大电粘合离合器实现既强劲又可回驱的机器人
既能紧握又能温柔感应的机器人
想象一只机器人手,它能小心翼翼地握住熟透的桃子,然后在片刻后稳稳抓住沉重的工具——同时仍保持体积紧凑且能耗低。本文提出了一种通过重新思考机器人如何传递力来构建此类机械手的新方法。研究人员结合巧妙的几何构型和电控摩擦,创造出既强大又易于推动的紧凑机制,类似于能在需要时柔软让步又能锁定的人的手。
为什么机器人手既需要“肌肉”又需要“软触感”
现代机器人难以匹配人手在力量、速度和触觉敏感度方面的综合表现。传统电机常需笨重的齿轮箱以产生足够扭矩,这使得系统变重、效率低且难以回驱——也就是说,当人或物体对其施力时难以被推动。对于处理食物、辅助人类或包装易碎物品等任务,这是一大问题:你希望机械手在接触时能安全地让步,但在位置就位后又能牢固抓住物体。现有方案如软体机器人、气动系统和可变刚度机制提供了部分解答,但往往力量不足、速度慢或难以扩展到多个关节。
用一种电机驱动多根手指的全新方式
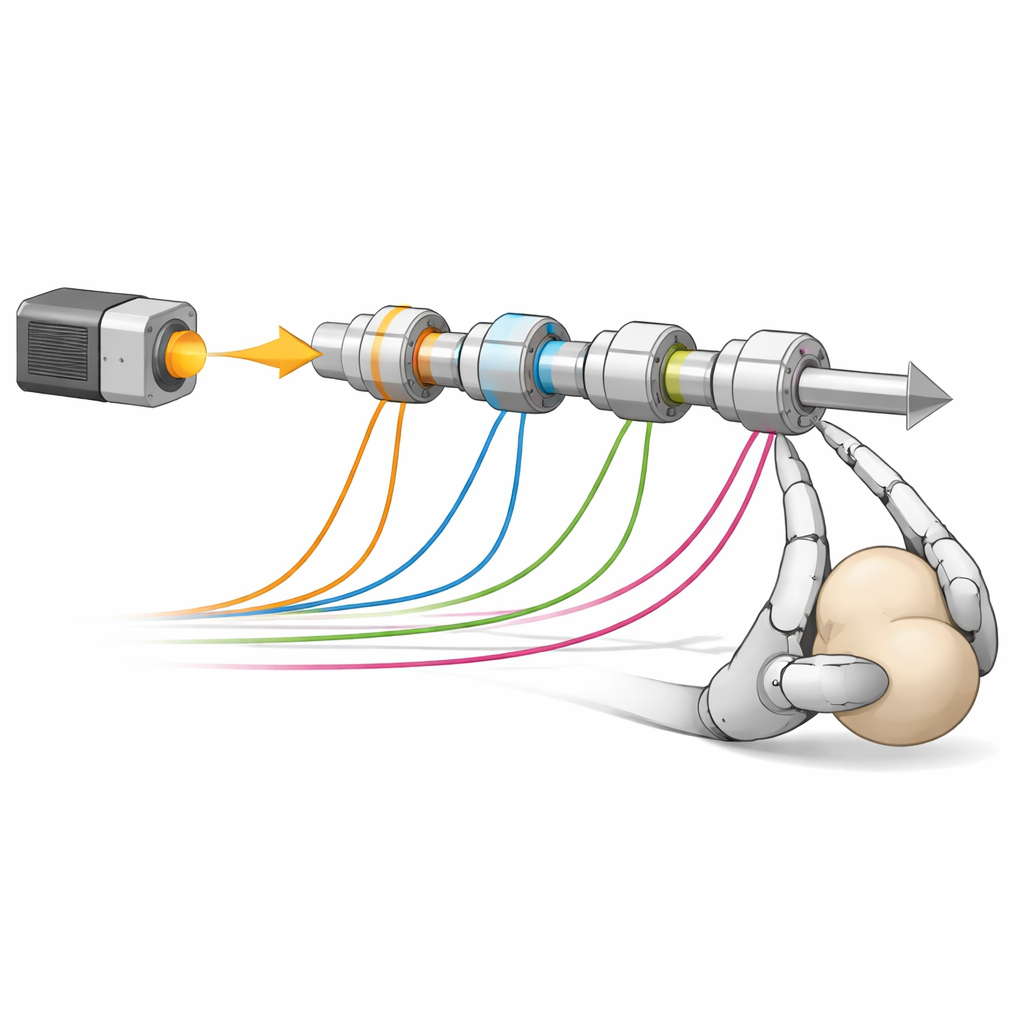
作者提出了一种“机电复用”架构,允许单个电机通过特殊制动器——电粘合离合器——驱动多个关节。可以把它想象成一根沿臂部贯穿的旋转轴,轴上沿长度方向围绕着一系列细薄膜带。当电压关闭时,这些薄带几乎不抓持表面,允许运动自由传递;当施加电压时,静电吸引使薄带粘附,从而通过沿曲面缠绕产生的摩擦把大力传递给连接的腱索。通过配对离合器——一个从轴上拉动腱索,另一个将该腱索锁定到固定点——系统可以在每根手指之间切换:既具备柔软、可回驱的运动相位,又能在不让电机持续高负荷运行的情况下进入稳固、省能的保持相位。
利用曲面放大微小力
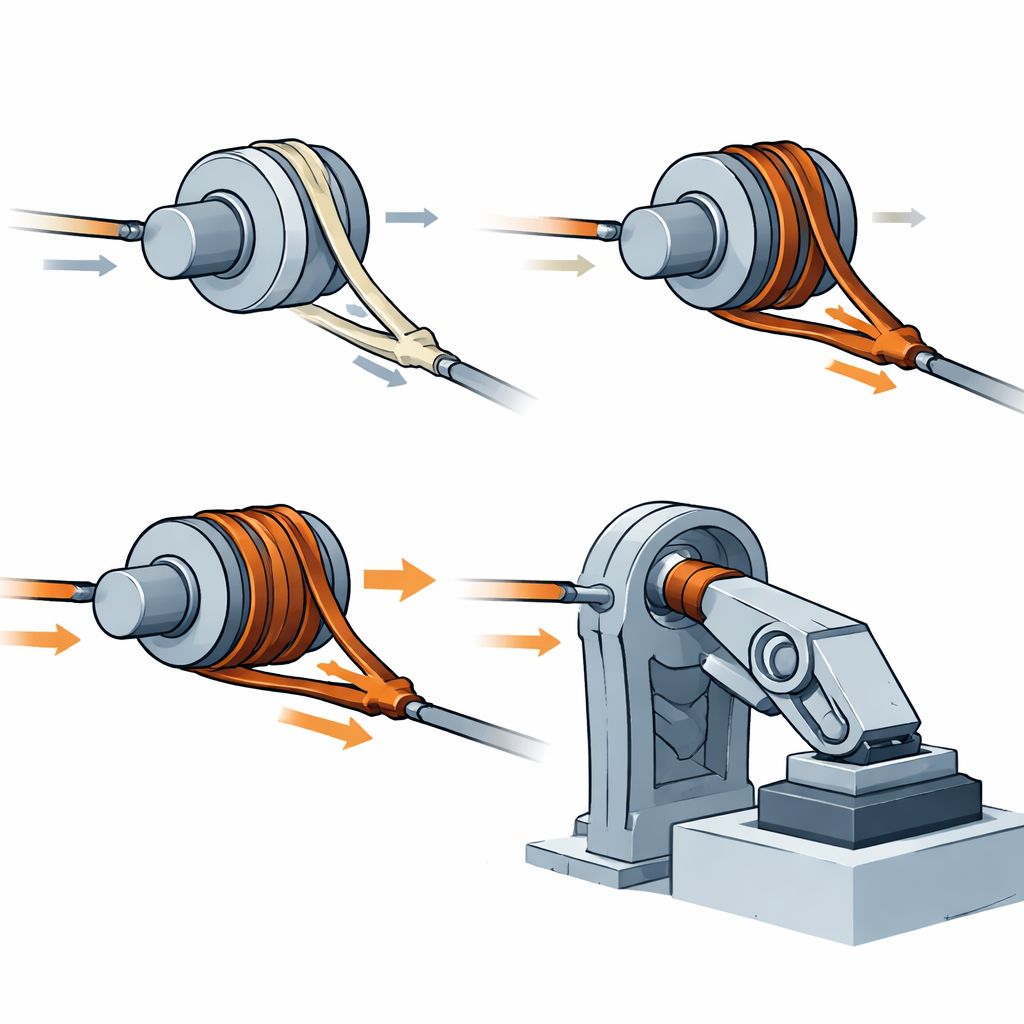
该方法的核心是利用“卷筒效应”,这与水手通过将绳索缠绕在柱子上以牵持重物的原理相同。在这里,一条薄的电粘合条缠绕在圆柱表面上。团队将经典的卷筒理论扩展,纳入由静电吸引产生的额外法向力。他们的模型显示,传递力随缠绕角度呈指数增长,但仅在薄带相对于表面发生滑动的区域有效。单圈与多圈缠绕的实验验证了这一行为:随着圈数增加,离合器可承受超过100牛顿的力,而当电压关闭时,力会降至仅几牛顿。对缠绕薄带内部应变的高速成像显示出滑移前沿如何从高张力侧开始并随载荷增加沿弧长推进,给出了离合器如何分担载荷及其最有效位置的物理图景。
从短脉冲到平滑、对人友好的抓取
由于离合器由电子方式控制,其输出力可以随时间被塑造。研究者测量了在不同电压和驱动模式下离合器打开和关闭的速度,发现它们能在几毫秒内释放,并能在接近1千赫兹的频率下有效工作。这一速度使得可以使用脉宽调制:不将离合器保持全开,而是以短促的开-关脉冲限制腱索张力的累积,从而将力调节到牛顿的分数级。在这种低力“滑移”工作区,关节呈现出顺应性,易于被推动,使机械手能贴合物体并能被用户安全地回驱。当命令持续啮合时,相同的硬件又能产生很高的保持力。
可按需切换模式的两指演示
为在系统层面验证该概念,团队构建了一个两指抓持器,每根手指有三个关节。所有六个关节共用一台电机,每根腱索由一对处于载荷传递配置的离合器控制——一只用于牵引,一只用于锁定。通过低占空比的电压脉冲,手指变得柔软且富有顺应性:它们补偿回位弹簧,轻柔地闭合包裹软泡沫或薄塑料,并能在小力作用下被推开同时保持接触。当外侧的“锁定”离合器啮合时,腱索被锁定到基座,抓持器可承受超过一千克的负载,包括钩持和拳状抓取的重物。关键在于,保持负载几乎不消耗电机功率,因为载荷由离合器承担——而非电机。
这对未来机器人手意味着什么
总体而言,这项工作表明,通过结合巧妙的几何设计、电粘合以及精确的时序控制,可以构建体积紧凑的机器人手,其力范围跨越三个数量级——从羽毛般的轻触到牢固的握持——同时保持可回驱性和能效。设计者无需增加更多电机和齿轮,而是可以让一台电机服务于多个关节,并用这些薄膜离合器决定每根手指何时应温和顺从、何时应锁定并提供强力。这为未来更轻、更安全、且更能应对现实世界多样化物体的机器人手指明了方向。
引用: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
关键词: 机器人抓手, 电粘合离合器, 可回驱执行, 卷筒效应, 灵巧操控