Clear Sky Science · ar
روبوتات قوية لكنها قابلة للإرجاع عبر قوابض كهرلصقية مُضخَّمة بتأثير الكبستان
روبوتات يمكنها الإمساك بقوة لكنها تظل طرية الإحساس
تخيل يد روبوت تستطيع الإمساك بلطف بخوخ ناضج ثم، بعد لحظات، تمسك أداة ثقيلة بثبات—كل ذلك مع بقائها صغيرة الحجم وموفرة للطاقة. تقدم هذه الورقة طريقة جديدة لبناء مثل هذه الأيدي عبر إعادة التفكير في كيفية نقل القوة داخل الروبوت. يجمع الباحثون بين هندسة ذكية واحتكاك يتم التحكم به كهربائياً لابتكار آليات مدمجة تكون قوية وفي الوقت نفسه سهلة الإرجاع للحركة، تماماً كما اليد البشرية التي يمكنها الخضوع برفق ثم أن تقفل مكانها عند الحاجة.
لماذا تحتاج أيادي الروبوت مزيجاً من القوة واللمسة الناعمة
تجد الروبوتات الحديثة صعوبة في مسايرة مزيج اليد البشرية من القوة والسرعة والحساسية. المحركات الكهربائية التقليدية غالباً ما تحتاج إلى صناديق تروس ضخمة لتوليد عزم كافٍ، مما يجعلها ثقيلة وغير كفؤة وصعبة الإرجاع—أي صعب تحريكها يدويًا أو بواسطة جسم آخر بدفع مباشر. بالنسبة لمهام مثل التعامل مع الطعام، مساعدة الناس، أو تعبئة عناصر هشة، يمثل هذا مشكلة: تريد أن تتجاوب اليد بأمان عند الملامسة، وفي الوقت نفسه أن تثبت الأشياء بأمان بعد وضعها. الحلول الحالية مثل الروبوتات اللينة، الأنظمة الهوائية، والآليات متغيرة الصلابة تقدم إجابات جزئية لكنها تميل لأن تكون ضعيفة أو بطيئة أو صعبة التوسعة إلى عدد كبير من المفاصل.
طريقة جديدة لمشاركة محرك واحد بين عدة أصابع
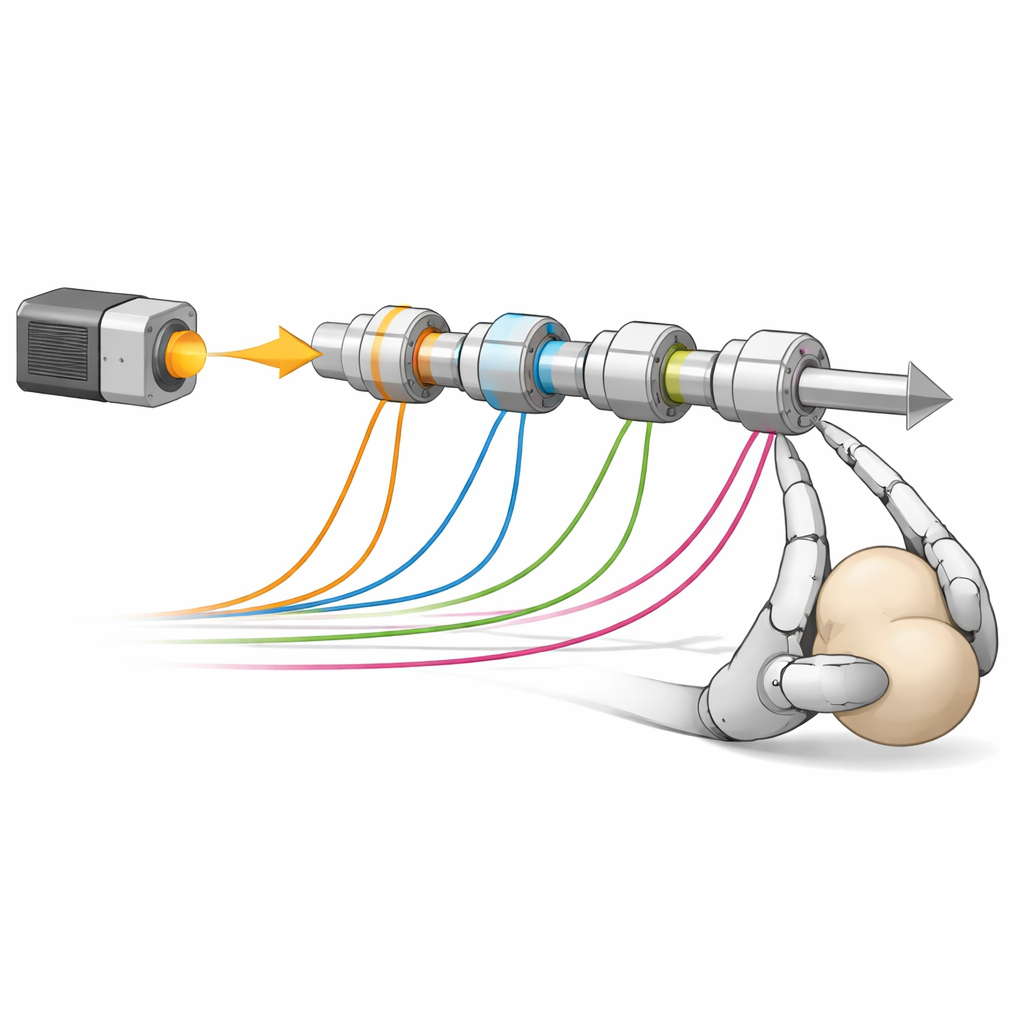
يقترح المؤلفون بنية «تعدد توافقي كهروميكانيكي» تسمح لمحرك واحد بتحريك عدة مفاصل عبر توجيه الطاقة عبر فرامل خاصة تسمى قوابض كهرلصقية. تخيل عمود دوران يمر عبر الذراع، مع شرائط رقيقة ملفوفة حول أسطوانات على امتداده. عندما لا يُطبق فولت، تمسك هذه الشرائط السطح بشكل طفيف، مما يسمح بمرور الحركة بحرية. عند تطبيق الفولت، يؤدي الجذب الكهروستاتيكي إلى التصاق الشرائط، فتسمح الاحتكاكات على الالتفاف المنحني بنقل قوى كبيرة إلى الأوتار المربوطة. عبر إقران قوابض—واحدة لسحب الوتر من العمود، وأخرى لربط ذلك الوتر إلى الأرضية—يمكن للنظام تحويل كل إصبع بين طور حركة طري وقابل للإرجاع وطور إمساك صلب وموفر للطاقة دون إجبار المحرك على العمل الشاق.
استخدام الأسطح المنحنية لتكبير قوى صغيرة
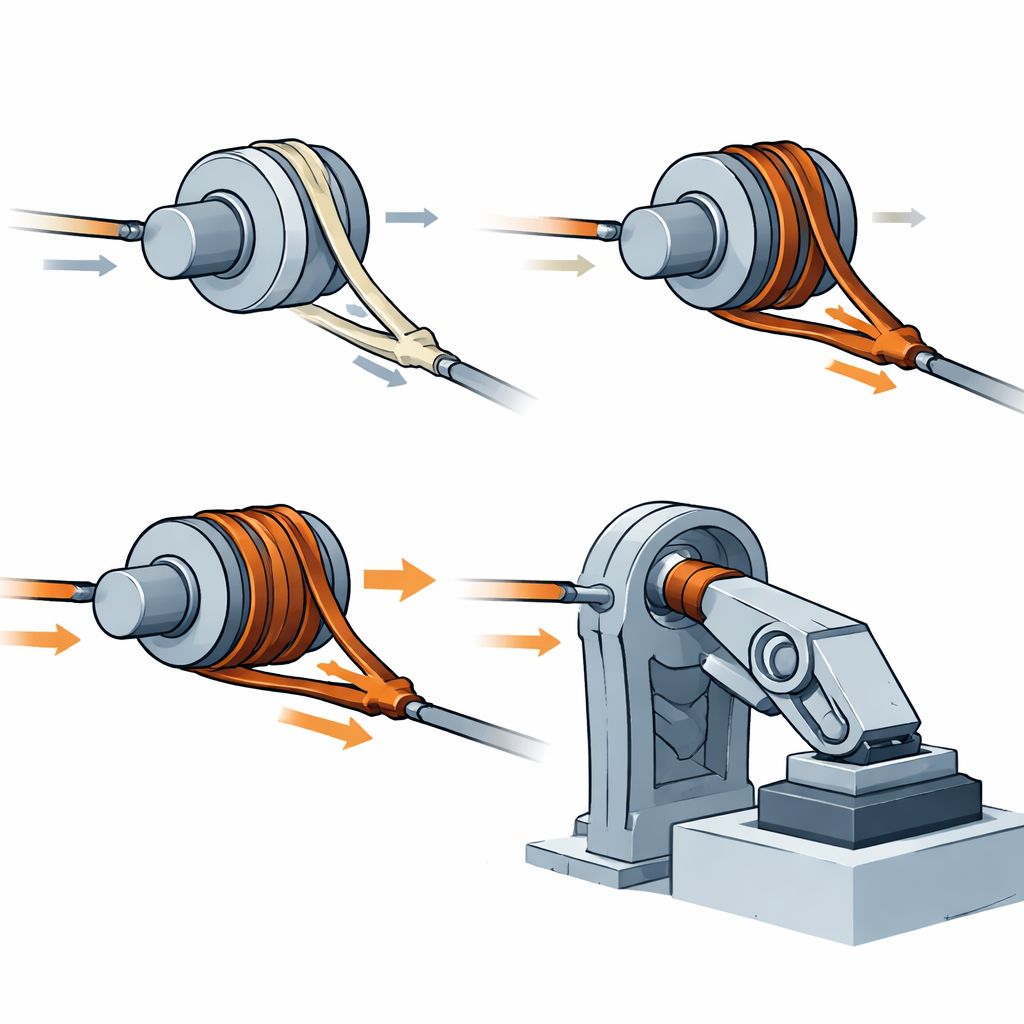
جوهر النهج هو استغلال «تأثير الكبستان»، نفس المبدأ الذي يمكّن البحار من إمساك حبل ثقيل بلفّه حول عمود. هنا تُلف شريط كهرلصقي رقيق حول سطح أسطواني. وسع الفريق النظرية التقليدية للكبستان لتشمل القوة العمودية الإضافية التي يولدها الجذب الكهروستاتيكي. تُظهر نماذجهم أن القوة المنقولة تنمو أُسِّياً مع زاوية اللف، لكن هذا صحيح فقط في المناطق التي ينزلق فيها الشريط فوق السطح. أكدت تجارب على لفّات مفردة ومتعددة هذه السلوكيات: مع ازدياد عدد اللفات، يمكن للقابض حمل قوى تتجاوز 100 نيوتن، ومع ذلك عندما يُقطع الفولت تنخفض القوة إلى بضعة نيوتن فقط. كشفت تصويرات عالية السرعة للانفعال داخل الشريط الملفوف كيف يبدأ جبه الانزلاق من جهة الشد العالي ويتقدم على القوس مع زيادة الحمل، مما يعطي صورة فيزيائية عن كيفية توزيع الحمل وأين تكون القابض أكثر فعالية.
من نبضات صغيرة إلى إمساك ناعم مناسب للبشر
بما أن القوابض تُتحكم إلكترونياً، يمكن تشكيل قوتها زمنياً. قاس الباحثون سرعة تشغيل وإيقاف القوابض تحت فولتات وأنماط قيادة مختلفة، ووجدوا أنها تستطيع التحرر في غضون بضعة ميليثوانٍ وتعمل بفعالية قرب 1 كيلو هرتز. تتيح هذه السرعة استخدام تعديل عرض النبضة: بدلاً من إبقاء القابض مُغلقاً تماماً، تحد نبضات تشغيل/إيقاف القصيرة مقدار الشد المتراكم في الوتر، مما يسمح بضبط القوى إلى أجزاء من النيوتن. في هذا النطاق المنخفض للقوة —وضع "الانزلاق"— تبدو المفاصل مطاوعة ويسهل دفعها، ما يمكّن اليد من التوافق مع الأجسام وأن تكون قابلة للإرجاع بأمان بواسطة المستخدم. عند طلب تفعيل مستمر، تنتج نفس الأجهزة قوى امساك عالية.
عرض عملي بإصبعين يبدّل أوضاعه حسب الطلب
لإثبات المفهوم على مستوى النظام، بنى الفريق ملاقط بإصبعين بثلاثة مفاصل لكل إصبع. تشترك المفاصل الستة كلها في محرك واحد، ويتحكم بكل وتر زوج من القوابض في تكوين نقل الحمل—واحدة للسحب، وأخرى للقفل. مع نبضات فولت منخفضة الواجب، تصبح الأصابع مطاوعة بلطف: تعوض زنبركات العودة، تُغلق برفق حول رغوة ناعمة أو بلاستيك رقيق، ويمكن دفعها بقوى صغيرة مع المحافظة على الاتصال. عندما تُفعل القوابض الخارجية "اللاقطة"، تُقفل الأوتار إلى الأرض ويمكن للملاقط حمل حمولات تفوق كيلوغراماً، بما في ذلك أجسام ثقيلة في إمساكات شبيهة بالخطاف أو القبضة. والأهم أن الإمساك يكاد لا يتطلب طاقة من المحرك، لأن القوابض—وليس المحرك—تحمل الحمل.
ماذا قد يعني هذا لأيدي الروبوت المستقبلية
بشكل عام، يظهر العمل أنه عبر الجمع بين هندسة ذكية، الكهرلصق، والتوقيت الدقيق، من الممكن بناء أيدي روبوتية مدمجة تغطي ثلاثة رتل من القوة—من لمسة رقيقة كالريشة إلى قبضة قوية—مع بقاء القدرة على الإرجاع وكفاءة الطاقة. بدلاً من إضافة المزيد من المحركات والتروس، يمكن للمصممين مشاركة محرك واحد بين عدة مفاصل واستخدام هذه القوابض الرقيقة لتقرير متى يجب أن يكون كل إصبع طرياً ومتعاوناً أو مقفلاً وقوياً. يشير هذا إلى أيادي روبوتية مستقبلية أخف وزناً، أكثر أماناً حول البشر، وأفضل في التعامل مع تنوع الأشياء الواقعية والفوضوية.
الاستشهاد: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
الكلمات المفتاحية: ملاقط روبوتية, قوابض كهرلصقية, نظام دفع قابل للإرجاع, تأثير الكبستان, التلاعب الماهر