Clear Sky Science · pl
Mocne, a jednocześnie podatne roboty dzięki elektromagnetycznym sprzęgłom elektroadhezyjnym wzmocnionym efektem kaptana
Roboty, które potrafią mocno trzymać, a jednocześnie być delikatne
Wyobraź sobie robotyczną dłoń, która potrafi delikatnie uchwycić dojrzałe brzoskwinie, a chwilę później mocno trzymać ciężkie narzędzie — wszystko to w kompaktowej i energooszczędnej formie. W artykule przedstawiono nowy sposób konstrukcji takich dłoni poprzez przemyślenie, jak roboty przekazują siłę. Naukowcy łączą sprytne kształty i elektrycznie sterowane tarcie, tworząc kompaktowe mechanizmy, które są zarówno silne, jak i łatwe do poruszenia z zewnętrznego źródła, podobnie jak ludzka dłoń, która może łagodnie ustąpić, a w razie potrzeby zablokować się.
Dlaczego dłonie robotów potrzebują i siły, i delikatnego dotyku
Współczesne roboty mają trudności z dorównaniem ludzkiej dłoni w połączeniu siły, szybkości i czułości. Tradycyjne silniki elektryczne często wymagają masywnych przekładni, by wygenerować odpowiedni moment obrotowy, co czyni je ciężkimi, nieefektywnymi i trudnymi do zewnętrznego poruszenia — to znaczy, żeby człowiek lub przedmiot mogły je łatwo przesunąć przy popychaniu. W zadaniach takich jak obsługa żywności, asysta ludziom czy pakowanie delikatnych przedmiotów to problem: chcesz, by dłoń bezpiecznie ustępowała przy kontakcie, a jednocześnie pewnie trzymała obiekty, gdy są już ustawione. Istniejące rozwiązania, jak roboty miękkie, systemy pneumatyczne czy mechanizmy o zmiennej sztywności, dają częściowe odpowiedzi, ale zwykle są słabe, wolne lub trudno je skalować do wielu stawów.
Nowy sposób na użycie jednego silnika dla wielu palców
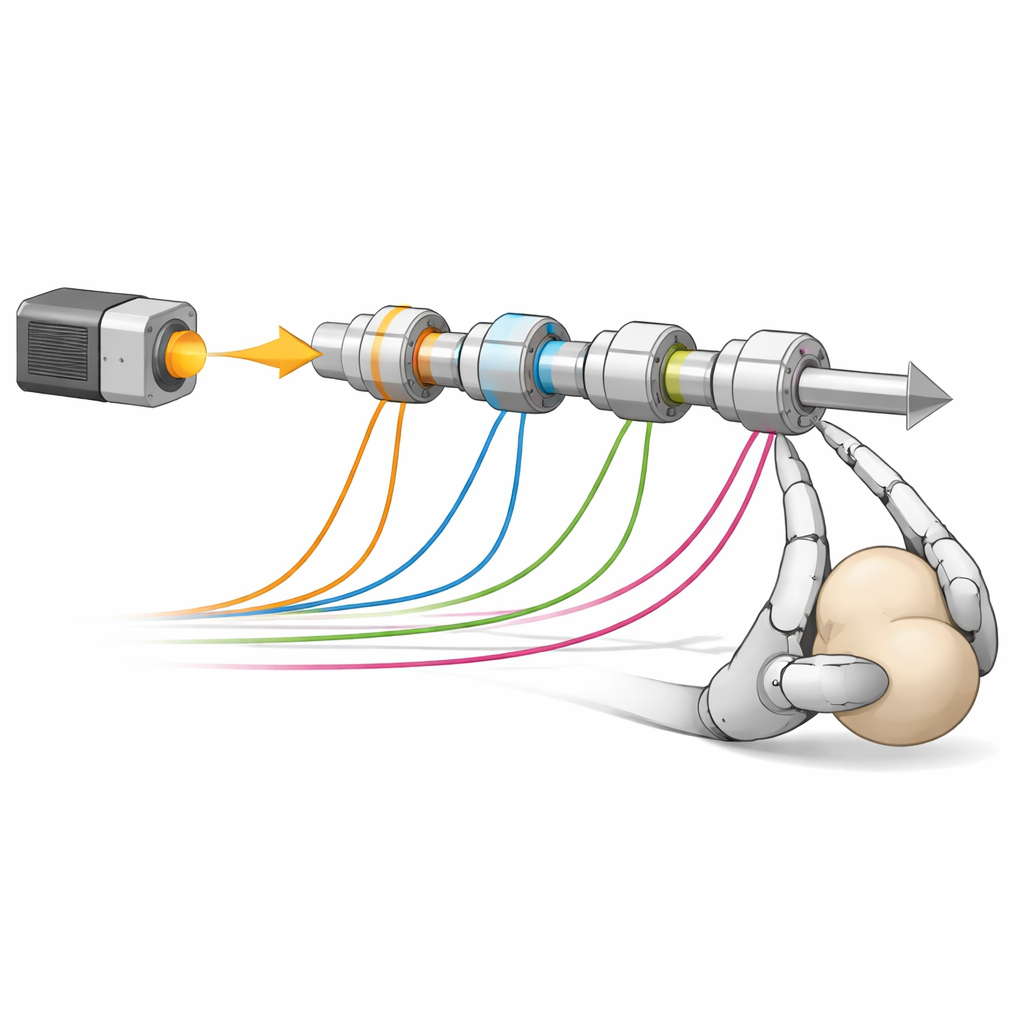
Autorzy proponują architekturę „multipleksowania elektromechanicznego”, która pozwala jednemu silnikowi napędzać wiele stawów, kierując moc przez specjalne hamulce zwane sprzęgłami elektroadhezyjnymi. Wyobraź sobie wirujący wał przebiegający przez ramię, z cienkimi taśmami owiniętymi wokół cylindrów wzdłuż jego długości. Gdy napięcie jest wyłączone, taśmy ledwie trzymają powierzchnię, pozwalając na swobodne przemieszczanie. Gdy przyłożone jest napięcie, przyciąganie elektrostatyczne powoduje, że taśmy przywierają, więc tarcie na zakrzywionym owinięciu może przenosić duże siły na przymocowane ścięgna. Parując sprzęgła — jedno do pociągnięcia ścięgna za wału, drugie do zablokowania ścięgna do podłoża — system może przełączać każdy palec między miękką, podatną na zewnętrzne napędzanie fazą ruchu a mocną, energooszczędną fazą trzymania, bez obciążania silnika.
Wykorzystanie zakrzywionych powierzchni do wzmocnienia niewielkich sił
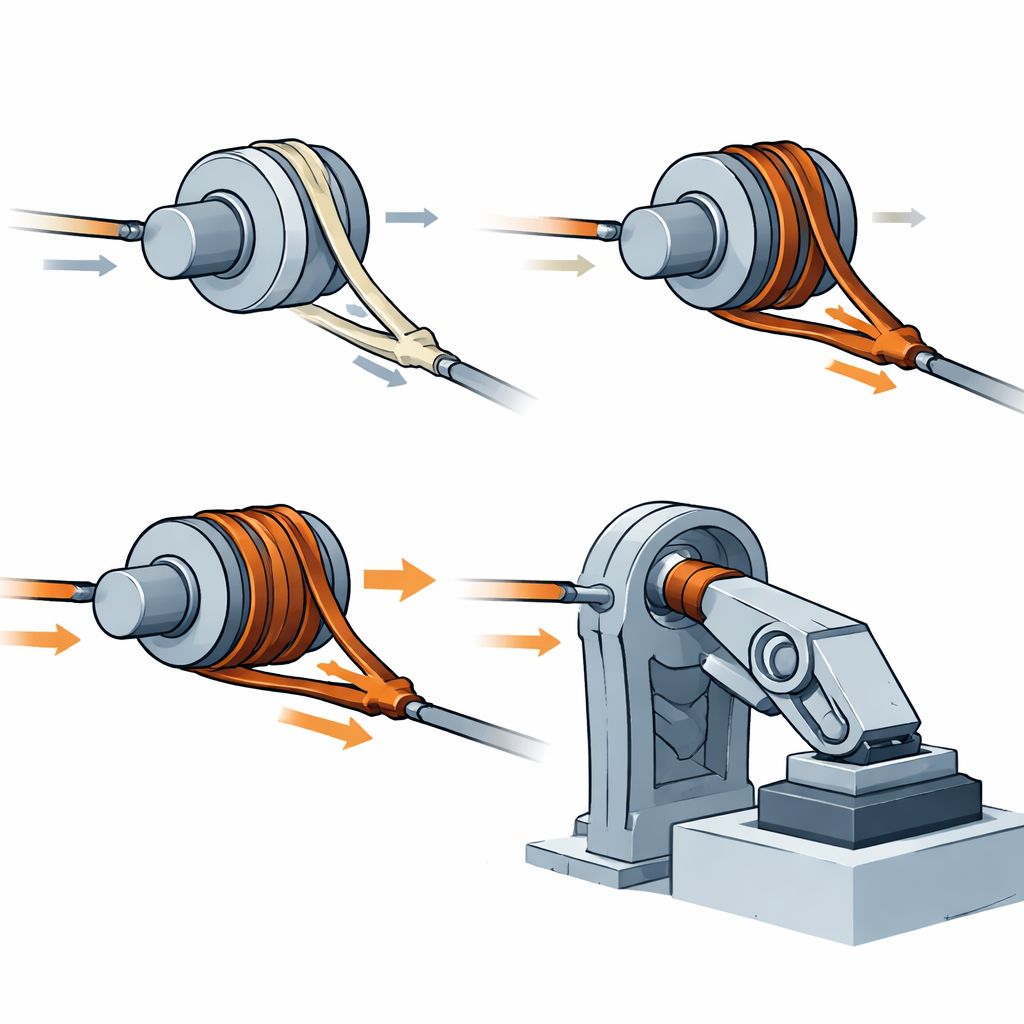
Rdzeniem podejścia jest wykorzystanie „efektu kaptana”, tej samej zasady, dzięki której żeglarz może utrzymać ciężkie obciążenie liny owijając ją wokół pale. Tutaj cienki pasek elektroadhezyjny jest owinięty wokół powierzchni cylindrycznej. Zespół rozszerzył klasyczną teorię kaptana, uwzględniając dodatkową siłę normalną generowaną przez przyciąganie elektrostatyczne. Ich model pokazuje, że przenoszona siła rośnie wykładniczo wraz z kątem owinięcia, ale tylko w obszarach, gdzie pasek się ślizga po powierzchni. Eksperymenty z pojedynczymi i wielokrotnymi zwojami potwierdziły to zachowanie: wraz ze wzrostem liczby zwojów sprzęgło może utrzymać siły przekraczające 100 niutonów, a gdy napięcie jest wyłączone, siła spada do zaledwie kilku niutonów. Fotografie o dużej prędkości obrazujące odkształcenia wewnątrz owiniętego paska ujawniły, jak front poślizgu zaczyna się po stronie o wysokim napięciu i postępuje wzdłuż łuku w miarę wzrostu obciążenia, dostarczając fizycznego obrazu, jak sprzęgło rozkłada obciążenie i gdzie jest najbardziej efektywne.
Od krótkich impulsów do płynnego, przyjaznego dla człowieka chwytu
Dzięki elektronicznemu sterowaniu sprzęgieł, ich siłę można kształtować w czasie. Naukowcy zmierzyli, jak szybko sprzęgła włączają się i wyłączają przy różnych napięciach i schematach sterowania, wykazując, że mogą zwalniać w zaledwie kilka milisekund i działać efektywnie w pobliżu 1 kiloherca. Ta szybkość umożliwia stosowanie modulacji szerokości impulsu: zamiast trzymać sprzęgło cały czas włączone, krótkie impulsy włączenia–wyłączenia ograniczają narastanie napięcia w ścięgnie, pozwalając na regulację sił do ułamków niutona. W tym niskosilnym reżimie „poślizgu” stawy wydają się podatne i łatwo je przesunąć, co pozwala ręce dopasować się do obiektów i bezpiecznie być napędzanym zewnętrznie przez użytkownika. Gdy zażądane jest ciągłe zaangażowanie, to samo wyposażenie generuje duże siły trzymania.
Demonstrator dwupalcowy, który przełącza tryby na żądanie
Aby potwierdzić koncepcję na poziomie systemowym, zespół zbudował chwytak dwupalcowy z trzema stawami na palec. Wszystkie sześć stawów dzieli pojedynczy silnik, a każde ścięgno jest kontrolowane przez parę sprzęgieł w konfiguracji przenoszenia obciążenia — jedno do pociągnięcia, drugie do zablokowania. Przy impulsach o niskim wypełnieniu palce stają się miękko podatne: kompensują sprężyny powrotne, delikatnie zaciskają się wokół miękkiej pianki lub cienkiego plastiku i można je odsunąć niewielkimi siłami, zachowując kontakt. Gdy zewnętrzne „zatrzaskujące” sprzęgła są załączone, ścięgna blokują się do podłoża, a chwytak może utrzymać ładunki powyżej kilograma, w tym ciężkie przedmioty chwycone hakowo lub w sposób przypominający pięść. Co kluczowe, utrzymanie wymaga prawie żadnej mocy silnika, ponieważ obciążenie przenoszą sprzęgła — a nie silnik.
Co to może znaczyć dla przyszłych dłoni robotycznych
Ogólnie praca pokazuje, że przez połączenie sprytnej geometrii, elektroadhezji i starannego timingu możliwe jest zbudowanie kompaktowych dłoni robotycznych pokrywających trzy rzędy wielkości siły — od piórkowo lekkiego dotyku po mocny chwyt — pozostając jednocześnie podatnymi na zewnętrzne napędzanie i energooszczędnymi. Zamiast dodawać więcej silników i przekładni, projektanci mogą dzielić jeden silnik między wiele stawów i używać tych cienkowarstwowych sprzęgieł do decydowania, kiedy każdy palec ma być miękki i współpracujący, a kiedy zablokowany i silny. To wskazuje na przyszłe dłonie robotyczne, które będą lżejsze, bezpieczniejsze w kontakcie z ludźmi i lepiej radzące sobie z nieuporządkowaną różnorodnością obiektów w rzeczywistym świecie.
Cytowanie: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
Słowa kluczowe: chwytaki robotyczne, sprzęgła elektroadhezyjne, aktuacja podatna na zewnętrzne napędzanie, efekt kaptana, dexteryczna manipulacja