Clear Sky Science · en
Strong yet backdrivable robots through capstan-amplified electroadhesive clutches
Robots That Can Hold Tight but Still Feel Gentle
Imagine a robot hand that can delicately grasp a ripe peach and then, moments later, firmly hold a heavy tool—all while staying compact and energy‑efficient. This paper presents a new way to build such hands by rethinking how robots transmit force. The researchers combine clever geometry and electrically controlled friction to create compact mechanisms that are both strong and easy to push around, much like a human hand that can yield softly yet lock in place when needed.
Why Robot Hands Need Both Muscle and a Soft Touch
Modern robots struggle to match the human hand’s mix of strength, speed, and sensitivity. Traditional electric motors often need bulky gearboxes to produce enough torque, which makes them heavy, inefficient, and hard to backdrive—that is, difficult for a person or object to move by pushing against them. For tasks such as handling food, assisting people, or packing delicate items, this is a problem: you want the hand to safely give way on contact, yet also hold objects securely once positioned. Existing solutions like soft robots, air-powered systems, and variable-stiffness mechanisms offer partial answers but tend to be weak, slow, or hard to scale to many joints.
A New Way to Share One Motor Across Many Fingers
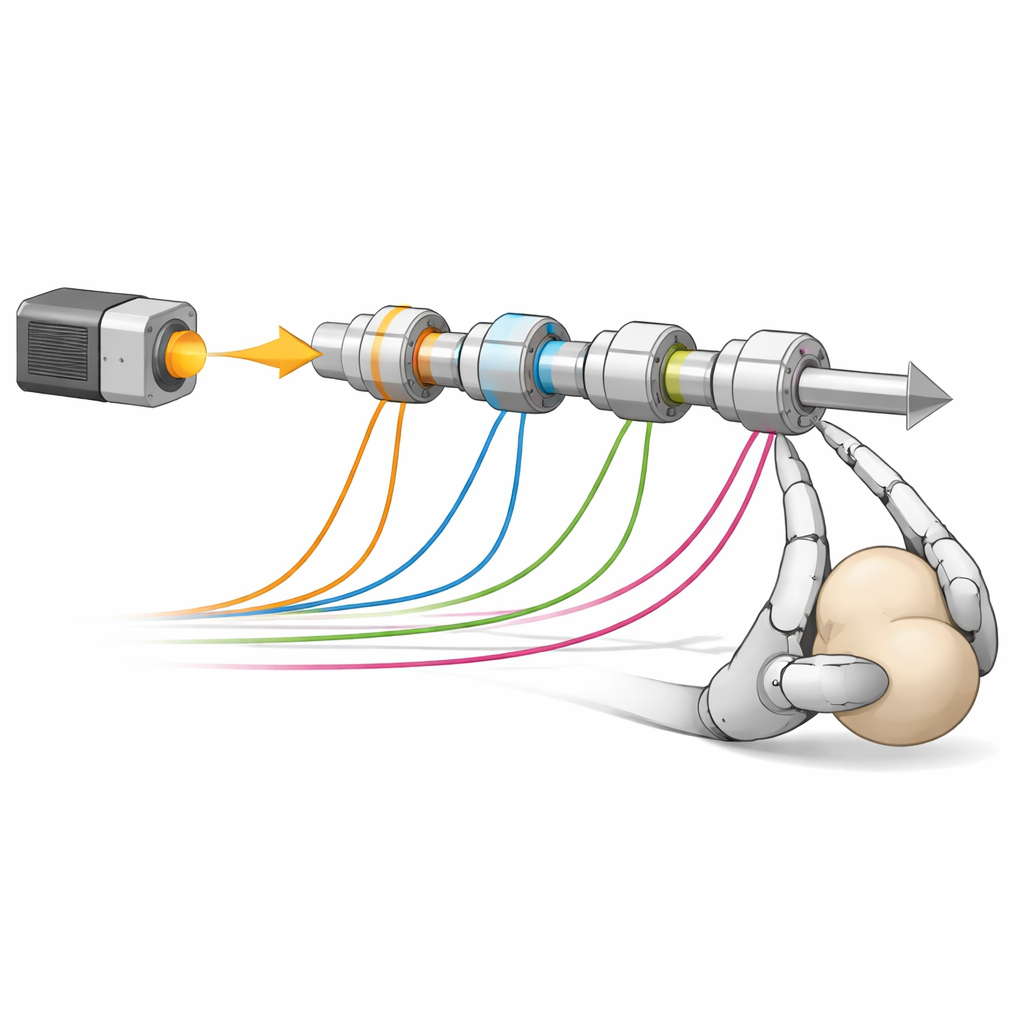
The authors propose an "electromechanical multiplexing" architecture that lets a single motor drive many joints by routing power through special brakes called electroadhesive clutches. Think of a spinning shaft running through the arm, with small, thin-film bands wrapped around cylinders along its length. When voltage is off, these bands barely grip the surface, allowing motion to pass by freely. When voltage is applied, electrostatic attraction makes the bands stick, so friction along the curved wrap can transmit large forces to attached tendons. By pairing clutches—one to pull a tendon from the shaft, another to latch that tendon to ground—the system can switch each finger between a soft, backdrivable motion phase and a firm, energy-efficient holding phase without leaving the motor working hard.
Using Curved Surfaces to Amplify Tiny Forces
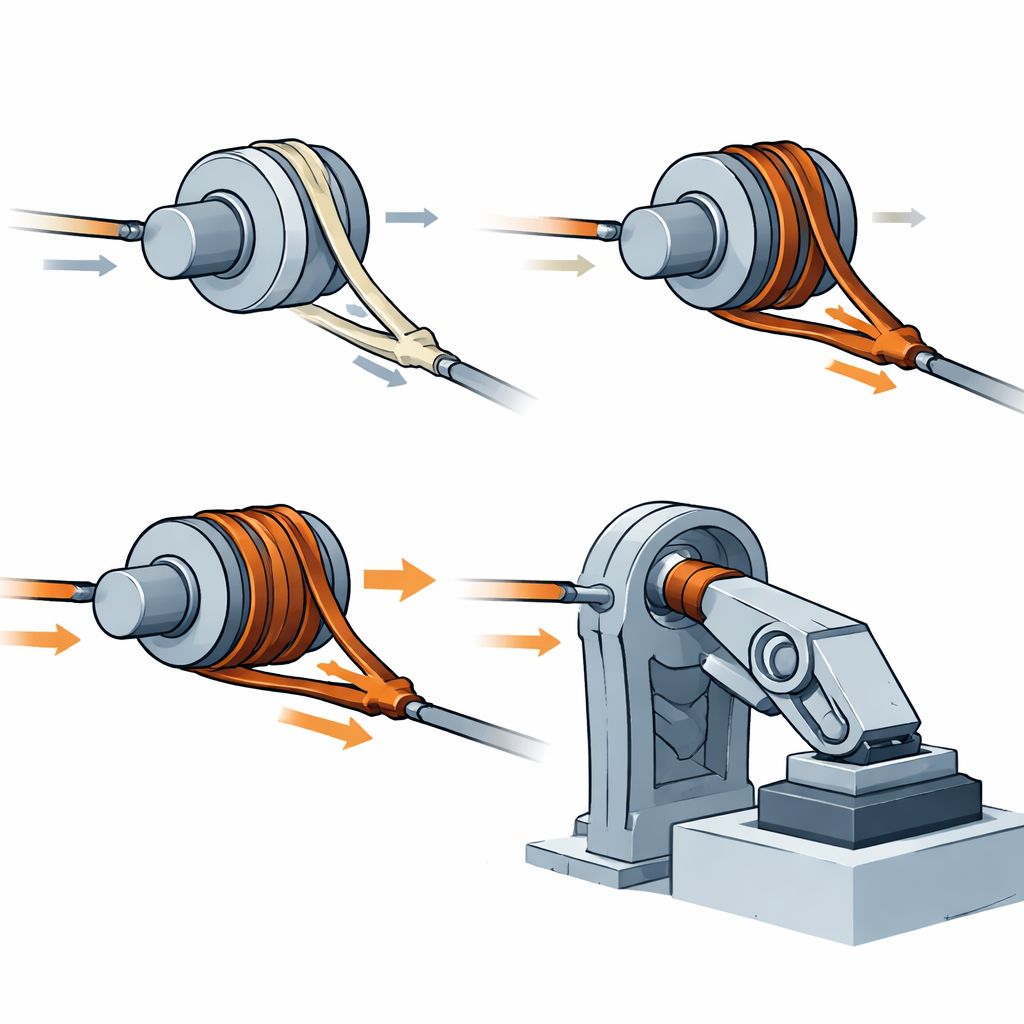
The heart of the approach is to exploit the "capstan effect," the same principle that lets a sailor hold a heavy rope load by wrapping it around a post. Here, a thin electroadhesive strip is wrapped around a cylindrical surface. The team extended classical capstan theory to include the extra normal force generated by electrostatic attraction. Their model shows that the transmitted force grows exponentially with wrap angle, but only in regions where the strip is slipping over the surface. Experiments with single- and multi-turn wraps confirmed this behavior: as the number of turns increases, the clutch can hold forces exceeding 100 newtons, yet when the voltage is off, the force drops to only a few newtons. High-speed imaging of strain inside the wrapped strip revealed how a slip front starts on the high-tension side and progresses along the arc as load increases, providing a physical picture of how the clutch shares load and where it is most effective.
From Tiny Pulses to Smooth, Human-Friendly Grasping
Because the clutches are controlled electronically, their force can be shaped in time. The researchers measured how quickly the clutches turn on and off under different voltages and drive patterns, finding that they can release in just a few milliseconds and operate effectively near 1 kilohertz. This speed makes it possible to use pulse-width modulation: instead of leaving the clutch fully on, short on–off pulses limit how much tension builds in the tendon, allowing forces to be tuned down to fractions of a newton. In this low-force "slip" regime, the joints feel compliant and are easily pushed around, enabling the hand to conform to objects and be safely backdriven by a user. When continuous engagement is commanded, the same hardware produces high holding forces.
A Two-Finger Demo That Switches Modes on Demand
To prove the concept at the system level, the team built a two-finger gripper with three joints per finger. All six joints share a single motor, and each tendon is controlled by a pair of clutches in the load-transfer configuration—one for pulling, one for locking. With low-duty voltage pulses, the fingers become softly compliant: they compensate for return springs, gently close around soft foam or thin plastic, and can be pushed back with small forces while maintaining contact. When the outer "latching" clutches are engaged, the tendons lock to ground and the gripper can hold loads over a kilogram, including heavy objects in hook and fist-like grasps. Crucially, holding requires almost no motor power, because the clutches—not the motor—carry the load.
What This Could Mean for Future Robot Hands
Overall, the work shows that by combining smart geometry, electroadhesion, and careful timing, it is possible to build compact robotic hands that span three orders of magnitude in force—from feather-light touch to firm grip—while remaining backdrivable and power efficient. Rather than adding more motors and gears, designers can share one motor across many joints and use these thin-film clutches to decide when each finger should be soft and cooperative or locked and strong. This points toward future robotic hands that are lighter, safer around people, and better able to handle the messy variety of real-world objects.
Citation: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
Keywords: robotic grippers, electroadhesive clutches, backdrivable actuation, capstan effect, dexterous manipulation