Clear Sky Science · nl
Krachtige maar terugdrijfbare robots dankzij kapstan‑versterkte elektroadhesieve koppelingen
Robots die stevig vasthouden maar toch zacht aanvoelen
Stel je een robothand voor die een rijpe perzik voorzichtig kan vastpakken en even later een zwaar gereedschap stevig kan vasthouden—en dat alles terwijl hij compact en energiezuinig blijft. Dit artikel presenteert een nieuwe manier om zulke handen te bouwen door opnieuw te denken over hoe robots kracht overbrengen. De onderzoekers combineren slimme geometrie met elektrisch geregelde wrijving om compacte mechanismen te creëren die zowel sterk zijn als gemakkelijk te bewegen, vergelijkbaar met een menselijke hand die zacht toegeeft maar zich kan vergrendelen wanneer dat nodig is.
Waarom robothanden zowel spierkracht als een zachte aanraking nodig hebben
Moderne robots hebben moeite om de combinatie van kracht, snelheid en gevoeligheid van de menselijke hand te evenaren. Traditionele elektromotoren hebben vaak omvangrijke tandwielen nodig om voldoende koppel te leveren, waardoor ze zwaar, inefficiënt en moeilijk terug te drijven zijn—dus lastig voor een persoon of object om door tegen te duwen in beweging te zetten. Voor taken zoals voedsel hantering, hulp aan mensen of het verpakken van kwetsbare voorwerpen is dit een probleem: je wilt dat de hand bij contact veilig toegeeft, maar ook dat hij objecten stevig vasthoudt zodra ze gepositioneerd zijn. Bestaande oplossingen zoals zachte robots, pneumatische systemen en mechanismen met variabele stijfheid bieden gedeeltelijke antwoorden, maar zijn vaak zwak, traag of moeilijk op te schalen naar veel gewrichten.
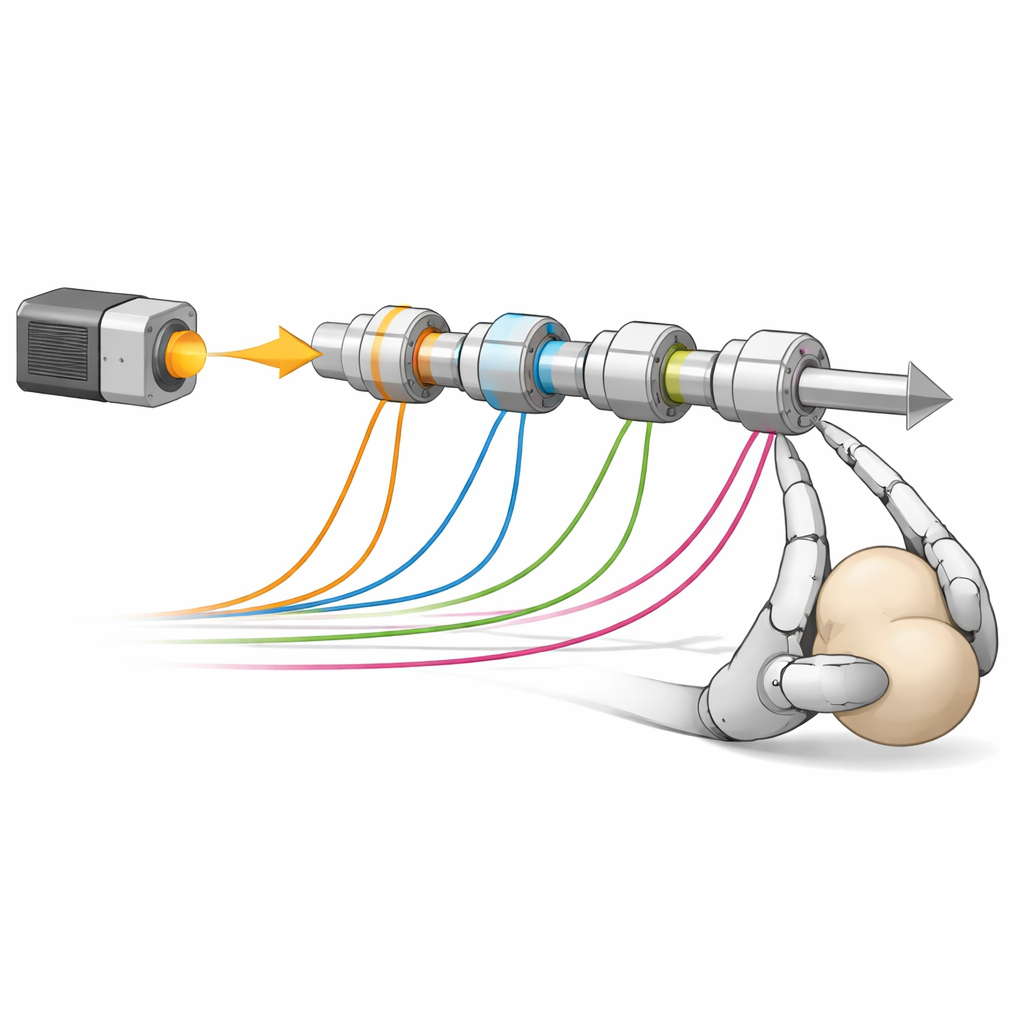
Een nieuwe manier om één motor over veel vingers te verdelen
De auteurs stellen een "elektromechanische multiplex"-architectuur voor die het mogelijk maakt dat één motor veel gewrichten aandrijft door vermogen te leiden via speciale remmen, zogenaamde elektroadhesieve koppelingen. Denk aan een draaiende as die door de arm loopt, met kleine, dunne filmbandjes gewikkeld om cilinders langs de lengte. Wanneer de spanning uitstaat, grijpen deze bandjes nauwelijks, waardoor beweging vrij kan passeren. Wanneer spanning wordt aangelegd, zorgt elektrostatische aantrekking ervoor dat de bandjes vastkleven, zodat wrijving langs de gebogen wikkeling grote krachten kan overbrengen naar gekoppelde pezen. Door koppelingen te combineren—één om een pees van de as te trekken en een andere om die pees aan de grond te vergrendelen—kan het systeem elke vinger schakelen tussen een zachte, terugdrijfbare bewegingsfase en een stevige, energiezuinige houdfase zonder dat de motor continu hard hoeft te werken.
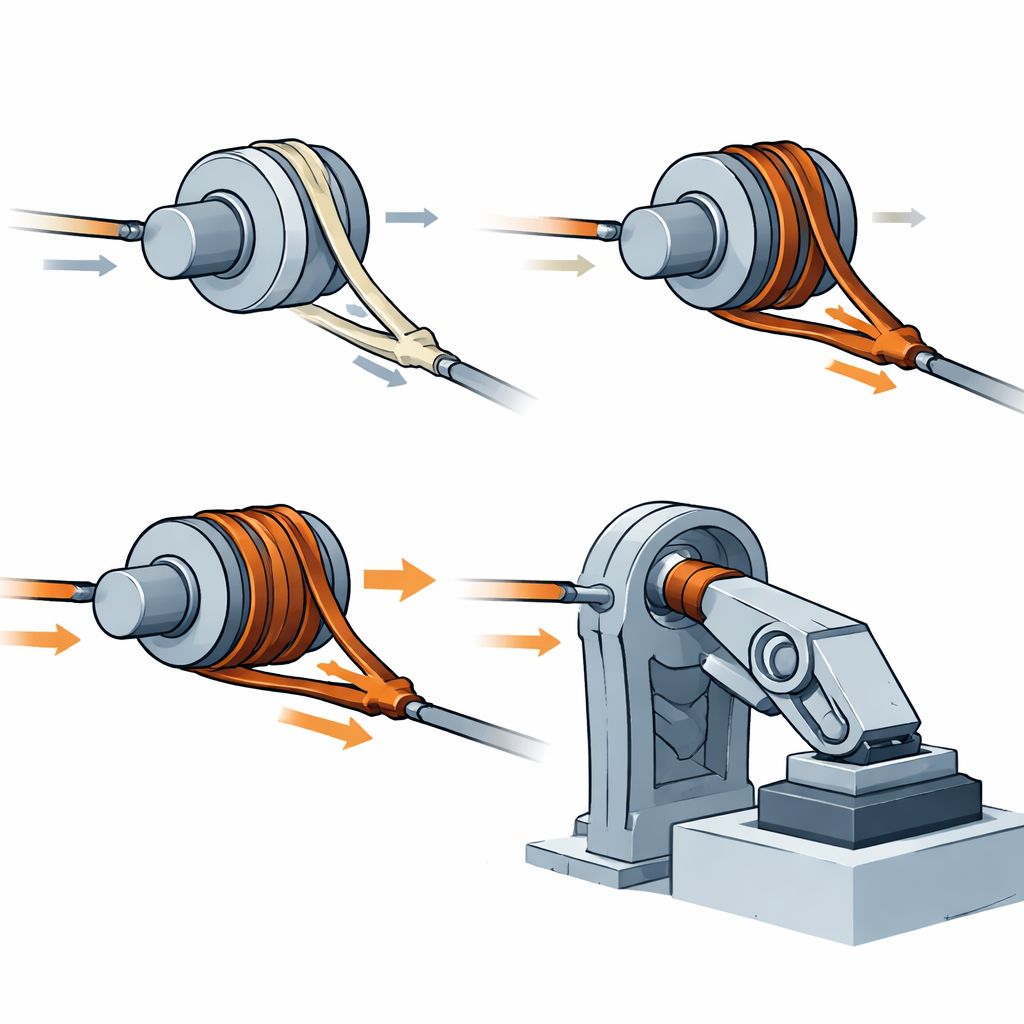
Gebogen oppervlakken gebruiken om kleine krachten te versterken
De kern van de benadering is het benutten van het "kapstan‑effect", hetzelfde principe waarmee een matroos een zwaar touw kan vasthouden door het om een paal te wikkelen. Hier wordt een dun elektroadhesief stripje om een cilindrisch oppervlak gewikkeld. Het team breidde de klassieke kapstan‑theorie uit om de extra normaalkracht te omvatten die door elektrostatische aantrekking wordt gegenereerd. Hun model toont aan dat de overgedragen kracht exponentieel toeneemt met de wikkelhoek, maar alleen in de gebieden waar het stripje over het oppervlak schuift. Experimenten met één- en meermaals wikkelingen bevestigden dit gedrag: naarmate het aantal windingen toeneemt, kan de koppeling krachten boven 100 newton vasthouden, terwijl de kracht, wanneer de spanning uitstaat, terugvalt naar slechts enkele newtons. Hoge‑snelheidsopnamen van rek in het gewikkelde stripje toonden hoe een slipfront begint aan de zijde met hoge spanning en zich langs de boog voortplant naarmate de belasting toeneemt, wat een fysiek beeld geeft van hoe de koppeling de last verdeelt en waar hij het meest effectief is.
Van kleine pulsen tot vloeiende, mensvriendelijke grijpen
Aangezien de koppelingen elektronisch worden aangestuurd, kan hun kracht in de tijd worden vormgegeven. De onderzoekers maten hoe snel de koppelingen in- en uitschakelen onder verschillende spanningen en aandrijfpatronen en vonden dat ze in slechts enkele milliseconden kunnen loslaten en effectief kunnen werken nabij 1 kilohertz. Deze snelheid maakt pulsbreedtemodulatie mogelijk: in plaats van de koppeling continu ingeschakeld te laten, beperken korte aan‑uitpulsen hoeveel spanning zich in de pees opbouwt, waardoor krachten tot fracties van een newton kunnen worden afgestemd. In dit laag‑krachtige "slip"‑regime voelen de gewrichten compliant aan en zijn ze gemakkelijk te verplaatsen, waardoor de hand zich aan objecten kan aanpassen en veilig door een gebruiker teruggeduwd kan worden. Bij continue inschakeling levert dezelfde hardware hoge houdkrachten.
Een tweewijzige demonstratie die op verzoek van modus wisselt
Om het concept op systeemniveau te bewijzen bouwde het team een tweewijzige gripper met drie gewrichten per vinger. Alle zes gewrichten delen één motor, en elke pees wordt geregeld door een paar koppelingen in de lastoverdrachtsconfiguratie—één om te trekken, één om te vergrendelen. Met lage‑duty spanningspulsen worden de vingers zacht compliant: ze compenseren terugveervoorspanning, sluiten voorzichtig rondom zacht schuim of dun plastic en kunnen met kleine krachten worden teruggedrukt terwijl ze contact behouden. Wanneer de buitenste "vergrendelende" koppelingen worden geactiveerd, worden de pezen aan de grond vergrendeld en kan de gripper belastingen van meer dan een kilogram vasthouden, inclusief zware objecten in haak- en vuistachtige grepen. Belangrijk is dat vasthouden vrijwel geen motorkracht vereist, omdat de koppelingen—niet de motor—de last dragen.
Wat dit kan betekenen voor toekomstige robothanden
Alles bij elkaar toont het werk aan dat door het combineren van slimme geometrie, elektroadhesie en zorgvuldige timing het mogelijk is compacte robothanden te bouwen die drie ordes van grootte in kracht overspannen—van veerlicht contact tot stevige greep—terwijl ze terugdrijfbaar en energiezuinig blijven. In plaats van meer motoren en tandwielen toe te voegen, kunnen ontwerpers één motor over veel gewrichten delen en deze dunne‑film koppelingen gebruiken om te bepalen wanneer elke vinger zacht en meewerkend moet zijn of vergrendeld en sterk. Dit wijst op toekomstige robothanden die lichter zijn, veiliger in de buurt van mensen en beter in staat om de rommelige variëteit van objecten in de echte wereld te hanteren.
Bronvermelding: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
Trefwoorden: robotische grippers, elektroadhesieve koppelingen, terugdrijfbare aandrijving, kapstan‑effect, vaste manipulatie