Clear Sky Science · de
Kraftvolle, aber rücktreibbare Roboter durch kapstanverstärkte elektroadhäsive Kupplungen
Roboter, die festhalten können und trotzdem sanft wirken
Stellen Sie sich eine Roboterhand vor, die einen reifen Pfirsich behutsam fassen und kurze Zeit später ein schweres Werkzeug festhalten kann — und das alles kompakt und energieeffizient. Dieses Papier stellt einen neuen Ansatz vor, solche Hände zu bauen, indem man die Kraftübertragung neu denkt. Die Forschenden kombinieren clevere Geometrie mit elektrisch steuerbarer Reibung, um kompakte Mechanismen zu schaffen, die sowohl stark als auch leicht zu bewegen sind, ähnlich einer menschlichen Hand, die weich nachgibt, aber bei Bedarf arretieren kann.
Warum Roboterhände sowohl Muskelkraft als auch eine sanfte Berührung brauchen
Moderne Roboter haben Schwierigkeiten, die Mischung aus Kraft, Geschwindigkeit und Sensitivität der menschlichen Hand zu erreichen. Herkömmliche Elektromotoren benötigen oft sperrige Getriebe, um genügend Drehmoment zu liefern, was sie schwer, ineffizient und schwer rücktreibbar macht — das heißt, es ist schwierig für eine Person oder ein Objekt, sie durch Gegenkraft zu bewegen. Bei Aufgaben wie der Lebensmittelhandhabung, Assistenz für Menschen oder dem Verpacken zerbrechlicher Gegenstände ist das problematisch: Die Hand soll bei Kontakt sicher nachgeben, aber Objekte nach dem Positionieren zuverlässig halten. Bestehende Lösungsansätze wie weiche Roboter, luftbetriebene Systeme und veränderliche Steifigkeitsmechanismen bieten Teilantworten, sind aber oft schwach, langsam oder schwer auf viele Gelenke skalierbar.
Eine neue Methode, einen Motor auf viele Finger zu verteilen
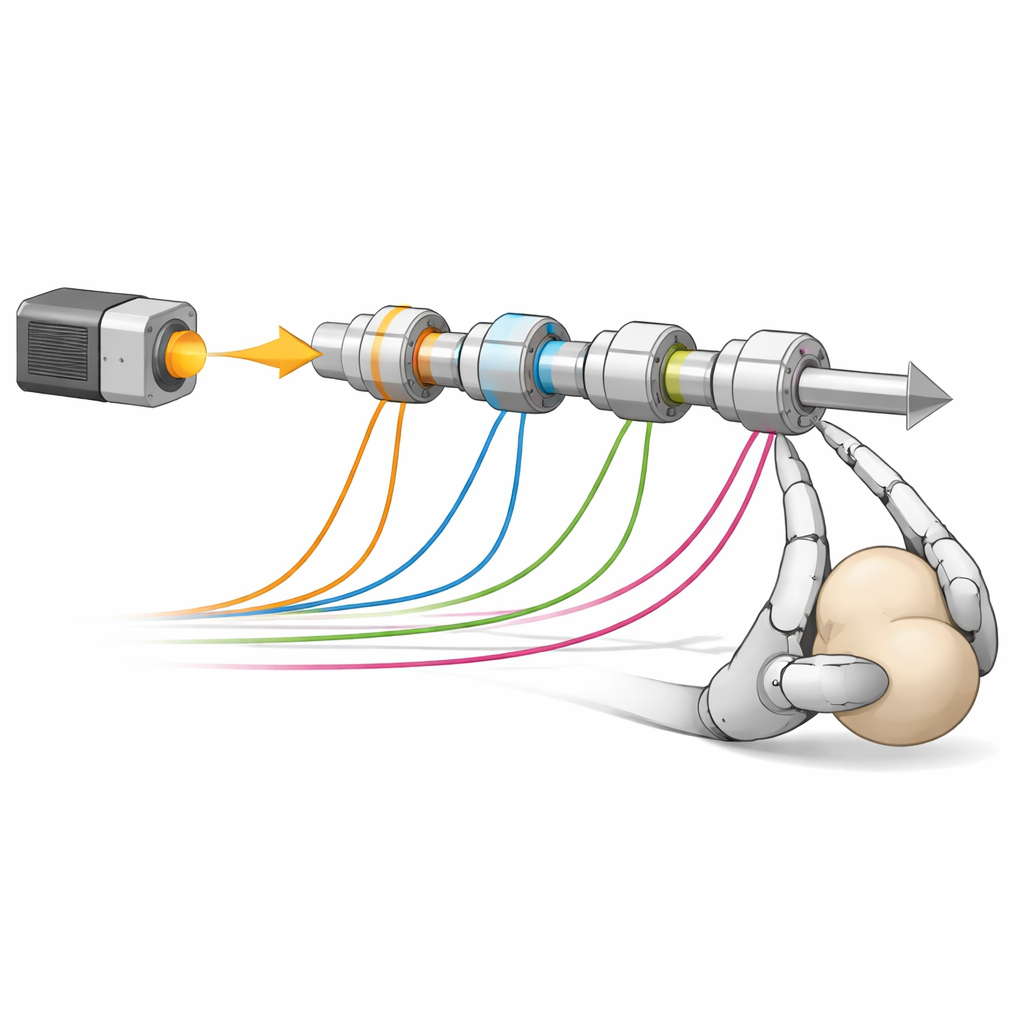
Die Autorinnen und Autoren schlagen eine „elektromechanische Multiplexing“-Architektur vor, die es einem einzelnen Motor erlaubt, viele Gelenke anzutreiben, indem die Kraft über spezielle Bremsen geleitet wird, sogenannte elektroadhäsive Kupplungen. Man kann sich eine drehende Welle vorstellen, die durch den Arm verläuft, mit dünnen Folienbändern, die um Zylinder entlang der Länge gewickelt sind. Ist die Spannung abgeschaltet, greifen diese Bänder kaum und die Bewegung kann frei passieren. Wird Spannung angelegt, sorgt elektrostatische Anziehung dafür, dass die Bänder haften, sodass Reibung entlang der Kurvenwicklung große Kräfte an die angeschlossenen Sehnen übertragen kann. Indem Kupplungen paarweise eingesetzt werden — eine zum Ziehen einer Sehne von der Welle, eine zum Arretieren dieser Sehne am Gehäuse — kann das System jeden Finger zwischen einer weichen, rücktreibbaren Bewegungsphase und einer festen, energieeffizienten Haltephase umschalten, ohne dass der Motor dauerhaft hart arbeiten muss.
Gekrümmte Oberflächen nutzen, um winzige Kräfte zu verstärken
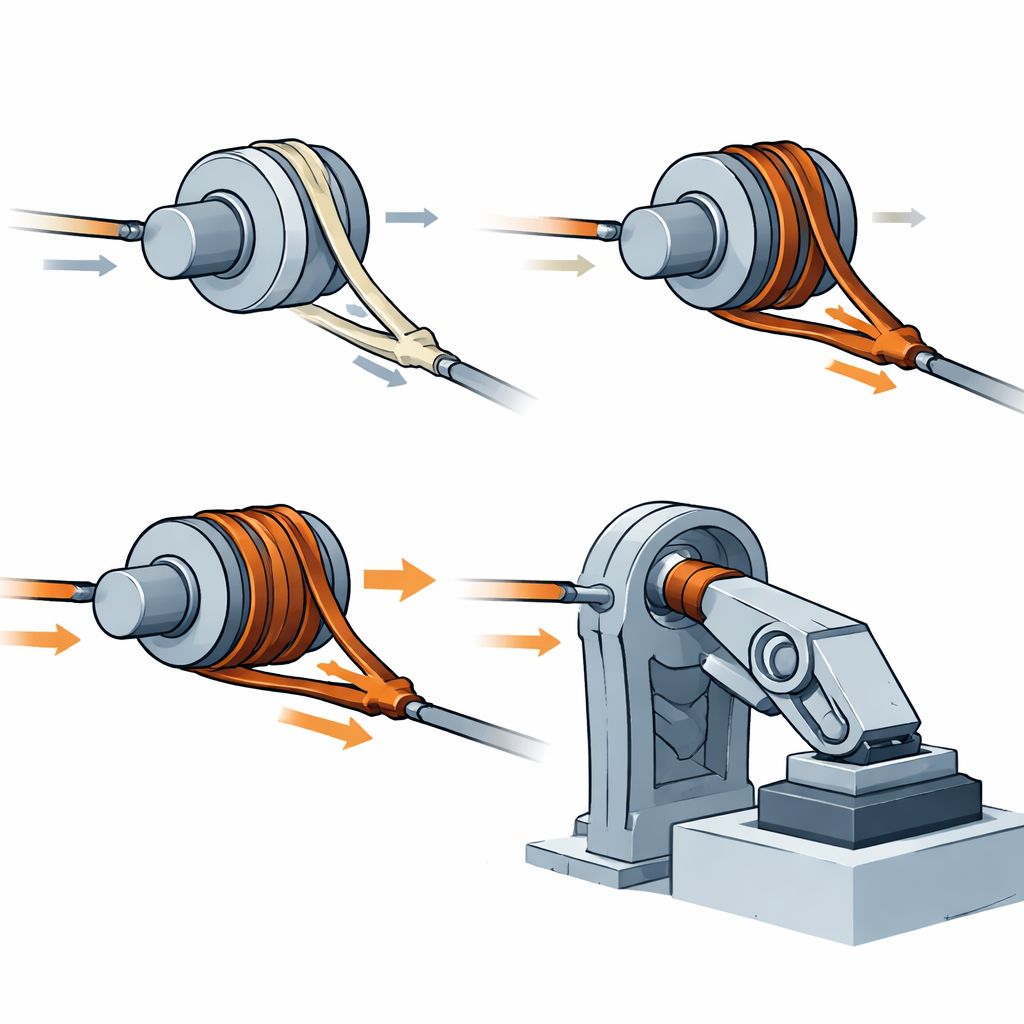
Der Kern des Ansatzes besteht darin, den „Kapstan-Effekt“ zu nutzen, dasselbe Prinzip, das es einem Seemann erlaubt, eine schwere Leinenlast durch Umwickeln an einem Pfosten zu halten. Hier wird ein dünner elektroadhäsiver Streifen um eine zylindrische Oberfläche gelegt. Das Team erweiterte die klassische Kapstan-Theorie um die zusätzliche Normalkraft, die durch elektrostatische Anziehung erzeugt wird. Ihr Modell zeigt, dass die übertragene Kraft mit dem Wickelwinkel exponentiell wächst, jedoch nur in Bereichen, in denen der Streifen über die Oberfläche gleitet. Experimente mit ein- und mehrlagigen Wicklungen bestätigten dieses Verhalten: Mit zunehmender Anzahl an Umdrehungen kann die Kupplung Kräfte über 100 Newton halten, während die Kraft bei ausgeschalteter Spannung auf nur einige Newton abfällt. Hochgeschwindigkeitsaufnahmen der Dehnung im gewickelten Streifen zeigten, wie eine Gleitfront auf der Hochzugseite beginnt und sich mit steigender Belastung entlang des Bogens ausbreitet, was ein physikalisches Bild davon liefert, wie die Kupplung Last teilt und wo sie am effektivsten ist.
Von winzigen Impulsen zu sanftem, menschenfreundlichem Greifen
Da die Kupplungen elektronisch gesteuert werden, lässt sich ihre Kraft zeitlich formen. Die Forschenden maßen, wie schnell die Kupplungen unter verschiedenen Spannungen und Ansteuerungsmustern ein- und ausschalten, und fanden heraus, dass sie sich in nur wenigen Millisekunden lösen und effektiv in der Nähe von 1 Kilohertz arbeiten können. Diese Geschwindigkeit ermöglicht Pulsweitenmodulation: Anstatt die Kupplung dauerhaft einzuschalten, begrenzen kurze An-/Aus-Impulse, wie viel Spannung in der Sehne aufgebaut wird, so dass Kräfte auf Bruchteile eines Newtons abgestimmt werden können. In diesem niederkraftigen „Gleit“-Regime fühlen sich die Gelenke nachgiebig an und lassen sich leicht verschieben, wodurch die Hand sich an Objekte anpasst und sicher von einem Benutzer rückgetrieben werden kann. Bei kontinuierlicher Schaltung liefert dieselbe Hardware hohe Haltekräfte.
Eine Zwei-Finger-Demonstration, die den Modus auf Abruf wechselt
Um das Konzept auf Systemebene zu demonstrieren, baute das Team einen Zwei-Finger-Greifer mit drei Gelenken pro Finger. Alle sechs Gelenke teilen sich einen Motor, und jede Sehne wird von einem Paar Kupplungen in einer Lastübertragungs-Konfiguration gesteuert — eine zum Ziehen, eine zum Arretieren. Mit niederfrequenten Spannungspulsen werden die Finger weich und nachgiebig: Sie kompensieren Rückholfedern, schließen sich sanft um weichen Schaum oder dünnen Kunststoff und lassen sich mit geringen Kräften zurückdrücken, während der Kontakt gehalten wird. Wenn die äußeren „Arretier“-Kupplungen eingerückt sind, werden die Sehnen am Gehäuse verriegelt und der Greifer kann Lasten über ein Kilogramm halten, einschließlich schwerer Objekte in Haken- oder Faustähnlichen Griffen. Entscheidend ist, dass das Halten nahezu keine Motorleistung erfordert, weil die Kupplungen — nicht der Motor — die Last tragen.
Was das für zukünftige Roboterhände bedeuten könnte
Insgesamt zeigt die Arbeit, dass sich durch die Kombination aus intelligenter Geometrie, Elektroadhäsion und sorgfältiger zeitlicher Steuerung kompakte Roboterhände bauen lassen, die über drei Größenordnungen an Kräften abdecken — von federleichter Berührung bis hin zum festen Griff — und dabei rücktreibbar und energieeffizient bleiben. Anstatt weitere Motoren und Getriebe hinzuzufügen, können Konstrukteure einen Motor auf viele Gelenke verteilen und diese dünnfilmigen Kupplungen nutzen, um zu entscheiden, wann jeder Finger weich und kooperativ oder verriegelt und stark sein soll. Das weist auf zukünftige Roboterhände hin, die leichter sind, sicheres Miteinander mit Menschen ermöglichen und besser mit der unordentlichen Vielfalt realer Objekte umgehen können.
Zitation: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
Schlüsselwörter: robotische Greifer, elektroadhäsive Kupplungen, rücktreibbare Aktuation, Kapstan-Effekt, geschickte Manipulation