Clear Sky Science · pt
Robôs fortes e ainda reversíveis por meio de embreagens eletroadesivas amplificadas por capstan
Robôs que podem apertar firme e ainda assim sentir com delicadeza
Imagine uma mão robótica capaz de segurar delicadamente um pêssego maduro e, instantes depois, segurar com firmeza uma ferramenta pesada — tudo mantendo formato compacto e eficiência energética. Este artigo apresenta uma nova forma de construir tais mãos ao repensar como robôs transmitem força. Os pesquisadores combinam geometria inteligente e atrito controlado eletricamente para criar mecanismos compactos que são ao mesmo tempo fortes e fáceis de movimentar, como uma mão humana que cede suavemente mas trava quando necessário.
Por que mãos robóticas precisam de força e sensibilidade
Robôs modernos têm dificuldade em igualar a combinação de força, velocidade e sensibilidade da mão humana. Motores elétricos tradicionais frequentemente exigem caixas de engrenagens volumosas para gerar torque suficiente, tornando-os pesados, ineficientes e difíceis de serem acionados por força externa — isto é, de serem retroacionados. Para tarefas como manuseio de alimentos, assistência a pessoas ou embalagem de itens frágeis, isso é um problema: você quer que a mão ceda com segurança ao contato e, ao mesmo tempo, mantenha objetos com segurança quando posicionados. Soluções existentes, como robótica macia, sistemas pneumáticos e mecanismos de rigidez variável, oferecem respostas parciais, mas tendem a ser fracos, lentos ou difíceis de escalar para muitos graus de liberdade.
Uma nova forma de compartilhar um motor entre vários dedos
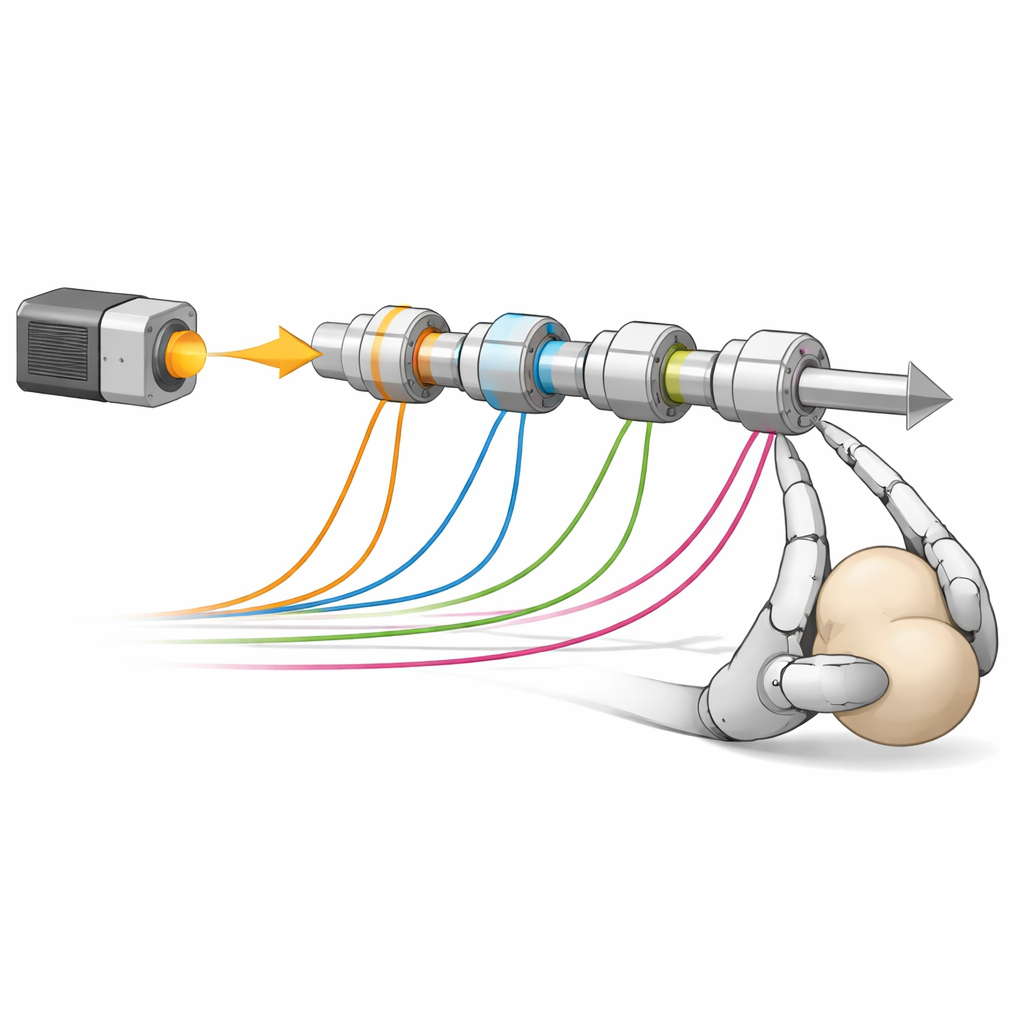
Os autores propõem uma arquitetura de “multiplexação eletromecânica” que permite a um único motor acionar muitas articulações roteando potência por meio de freios especiais chamados embreagens eletroadesivas. Pense em um eixo giratório correndo pelo braço, com pequenas faixas de filme fino envolvendo cilindros ao longo de seu comprimento. Quando a tensão é desligada, essas faixas aderem pouco à superfície, permitindo que o movimento passe livremente. Quando a tensão é aplicada, a atração eletrostática faz as faixas aderirem, de modo que o atrito ao longo do ângulo de contato transmite grandes forças para tendões conectados. Ao parear embreagens — uma para puxar um tendão a partir do eixo e outra para prender esse tendão à estrutura fixa — o sistema pode alternar cada dedo entre uma fase suave e reversível de movimento e uma fase firme e energeticamente eficiente de retenção, sem sobrecarregar o motor.
Usando superfícies curvas para amplificar forças pequenas
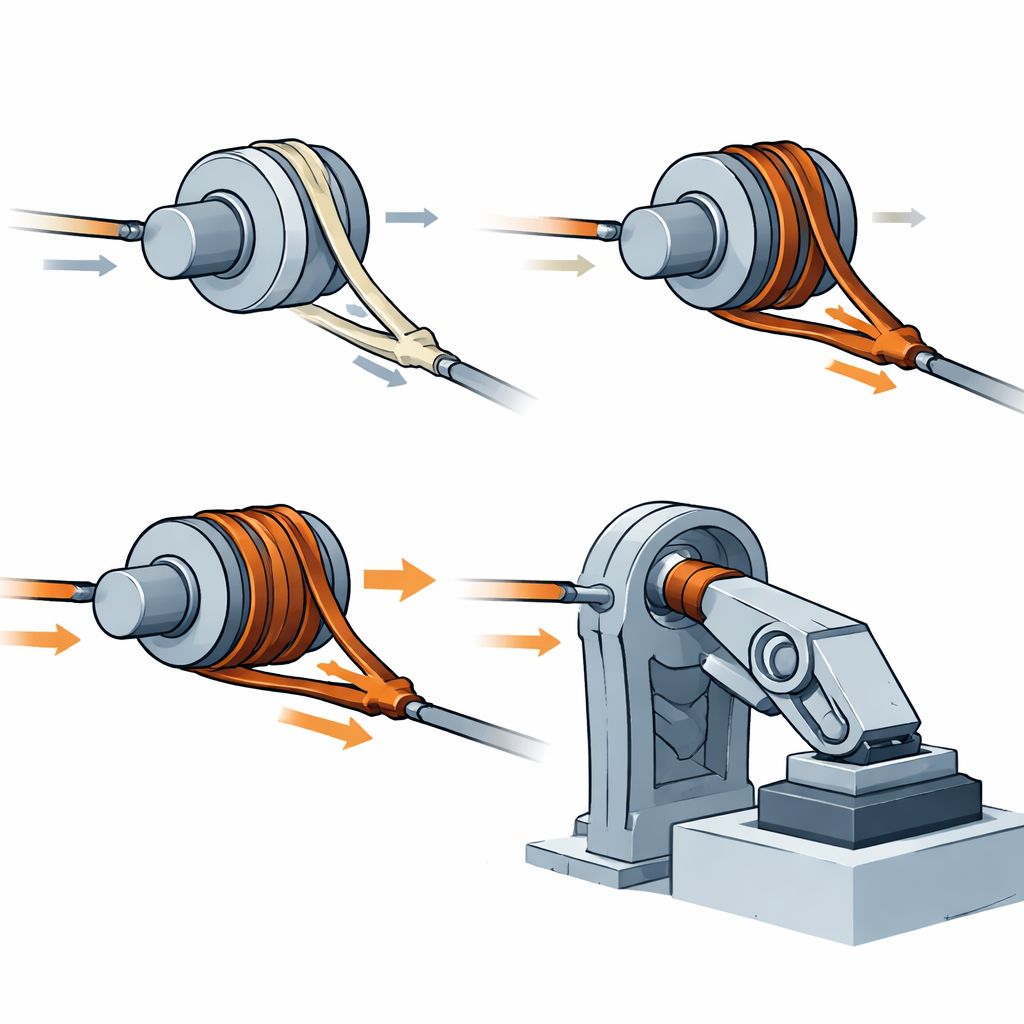
O cerne da abordagem é explorar o “efeito capstan”, o mesmo princípio que permite a um marinheiro segurar uma carga pesada de corda envolvendo-a em um poste. Aqui, uma faixa eletroadesiva fina é enrolada em torno de uma superfície cilíndrica. A equipe estendeu a teoria clássica do capstan para incluir a força normal extra gerada pela atração eletrostática. O modelo mostra que a força transmitida cresce exponencialmente com o ângulo de envolvimento, mas apenas nas regiões onde a faixa está deslizando sobre a superfície. Experimentos com enrolamentos de uma e várias voltas confirmaram esse comportamento: à medida que o número de voltas aumenta, a embreagem pode segurar forças superiores a 100 newtons, mas quando a tensão é desligada a força cai para apenas alguns newtons. Imagens em alta velocidade de deformação dentro da faixa enrolada revelaram como uma frente de deslizamento começa no lado de alta tensão e progride ao longo do arco conforme a carga aumenta, fornecendo uma imagem física de como a embreagem compartilha a carga e onde ela é mais eficaz.
De pulsos minúsculos a um aperto suave e amigável ao humano
Como as embreagens são controladas eletronicamente, sua força pode ser moldada no tempo. Os pesquisadores mediram quão rapidamente as embreagens ligam e desligam sob diferentes tensões e padrões de acionamento, encontrando que podem liberar em apenas alguns milissegundos e operar efetivamente perto de 1 quilohertz. Essa velocidade torna possível usar modulação por largura de pulso: em vez de manter a embreagem totalmente ligada, pulsos curtos liga–desliga limitam quanto tensão se acumula no tendão, permitindo que as forças sejam ajustadas a frações de newton. Nesse regime de baixo esforço de “deslizamento”, as articulações ficam conformes e são facilmente deslocadas, permitindo que a mão se adapte aos objetos e seja com segurança retroacionada por um usuário. Quando é comandado engajamento contínuo, o mesmo hardware produz altas forças de retenção.
Uma demonstração de dois dedos que muda de modo sob demanda
Para comprovar o conceito em nível de sistema, a equipe construiu uma pinça de dois dedos com três articulações por dedo. Todas as seis articulações compartilham um único motor, e cada tendão é controlado por um par de embreagens na configuração de transferência de carga — uma para puxar, outra para travar. Com pulsos de baixa relação cíclica, os dedos tornam-se suavemente conformes: compensam molas de retorno, fecham gentilmente ao redor de espuma macia ou plástico fino e podem ser empurrados com pequenas forças mantendo contato. Quando as embreagens externas de "trava" são engatadas, os tendões são presos ao chassi e a pinça pode segurar cargas acima de um quilograma, incluindo objetos pesados em ganchos e empunhaduras tipo punho. Crucialmente, a retenção requer quase nenhuma energia do motor, porque são as embreagens — não o motor — que suportam a carga.
O que isso pode significar para as mãos robóticas do futuro
No geral, o trabalho mostra que ao combinar geometria inteligente, eletroaderência e temporização cuidadosa, é possível construir mãos robóticas compactas que abrangem três ordens de magnitude em força — do toque mais leve ao aperto firme — permanecendo reversíveis e eficientes em termos de energia. Em vez de adicionar mais motores e caixas de engrenagens, os projetistas podem compartilhar um motor entre muitas articulações e usar essas embreagens de filme fino para decidir quando cada dedo deve ser macio e cooperativo ou travado e forte. Isso aponta para mãos robóticas futuras mais leves, mais seguras em contato com pessoas e melhores para lidar com a variada bagunça de objetos do mundo real.
Citação: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
Palavras-chave: pinças robóticas, embreagens eletroadesivas, atuação reversível, efeito capstan, manipulação hábil