Clear Sky Science · es
Robots fuertes pero retroaccionables mediante embragues electroadhesivos amplificados por capstán
Robots que pueden sujetar con firmeza pero seguir sintiéndose suaves
Imagínese una mano robótica que pueda agarrar con delicadeza un melocotón maduro y, momentos después, sostener con firmeza una herramienta pesada—todo manteniéndose compacta y eficiente energéticamente. Este artículo presenta una nueva forma de construir esas manos replanteando cómo los robots transmiten fuerzas. Los investigadores combinan una geometría ingeniosa y fricción controlada eléctricamente para crear mecanismos compactos que son a la vez potentes y fáciles de mover, como una mano humana que puede ceder suavemente pero bloquearse cuando es necesario.
Por qué las manos robóticas necesitan a la vez músculo y tacto suave
Los robots modernos tienen dificultades para igualar la mezcla de fuerza, velocidad y sensibilidad de la mano humana. Los motores eléctricos tradicionales suelen necesitar cajas reductoras voluminosas para producir suficiente par, lo que los hace pesados, ineficientes y difíciles de retroaccionar—es decir, complicados de mover por una persona u objeto que empuje contra ellos. Para tareas como manipular alimentos, asistir a personas o empaquetar objetos delicados, esto es un problema: se desea que la mano ceda con seguridad al contacto, pero que también sujete los objetos de forma segura una vez posicionados. Las soluciones existentes, como robots blandos, sistemas neumáticos y mecanismos de rigidez variable ofrecen respuestas parciales pero tienden a ser débiles, lentas o difíciles de escalar a muchos grados de libertad.
Una nueva forma de compartir un solo motor entre varios dedos
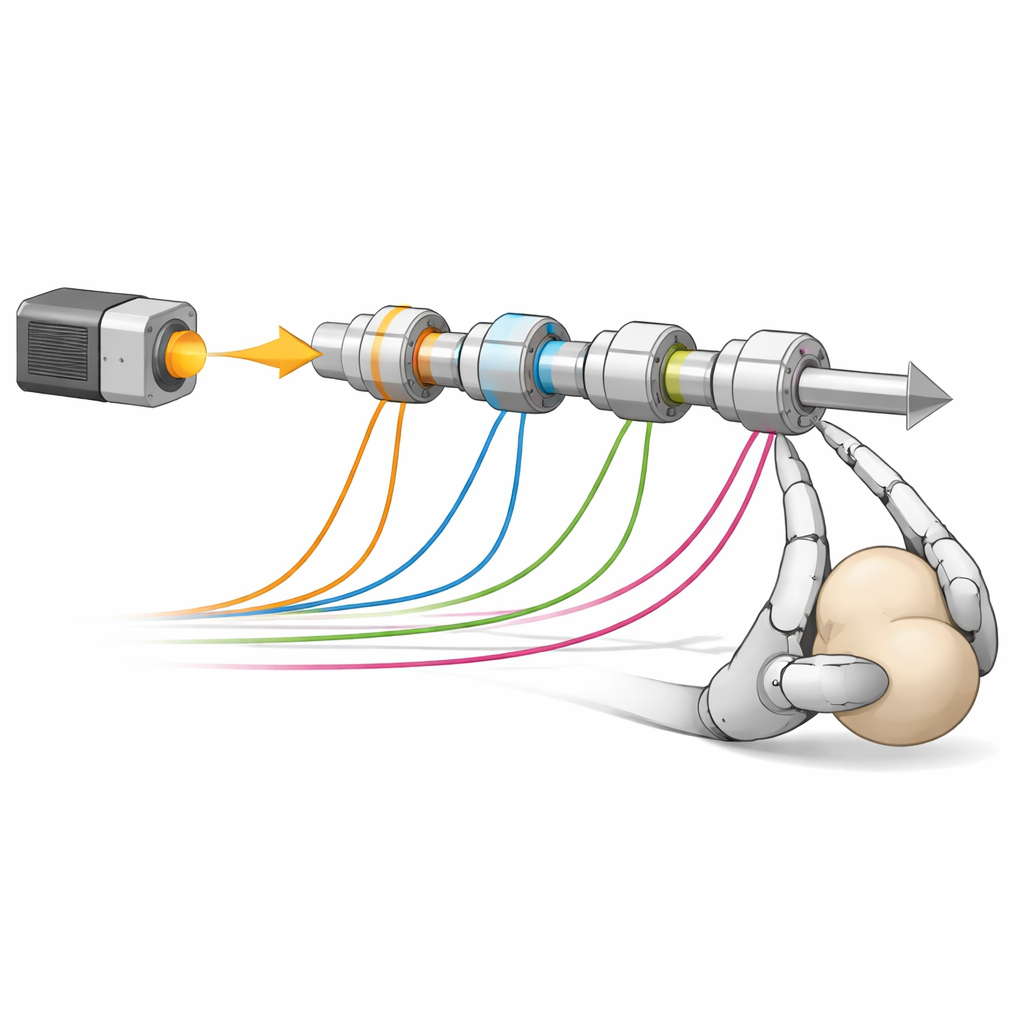
Los autores proponen una arquitectura de "multiplexado electromecánico" que permite a un único motor accionar muchas articulaciones canalizando potencia a través de frenos especiales llamados embragues electroadhesivos. Piense en un eje giratorio que recorre el brazo, con pequeñas bandas de película delgada envueltas alrededor de cilindros a lo largo de su longitud. Cuando el voltaje está apagado, estas bandas apenas agarran la superficie, permitiendo que el movimiento pase libremente. Cuando se aplica voltaje, la atracción electrostática hace que las bandas se adhieran, de modo que la fricción a lo largo del envolvimiento curvo puede transmitir grandes fuerzas a tendones conectados. Al emparejar embragues—uno para tirar de un tendón desde el eje y otro para fijar ese tendón a tierra—el sistema puede alternar cada dedo entre una fase de movimiento blando y retroaccionable y una fase de sujeción firme y eficiente energéticamente sin que el motor trabaje intensamente.
Usar superficies curvas para amplificar fuerzas diminutas
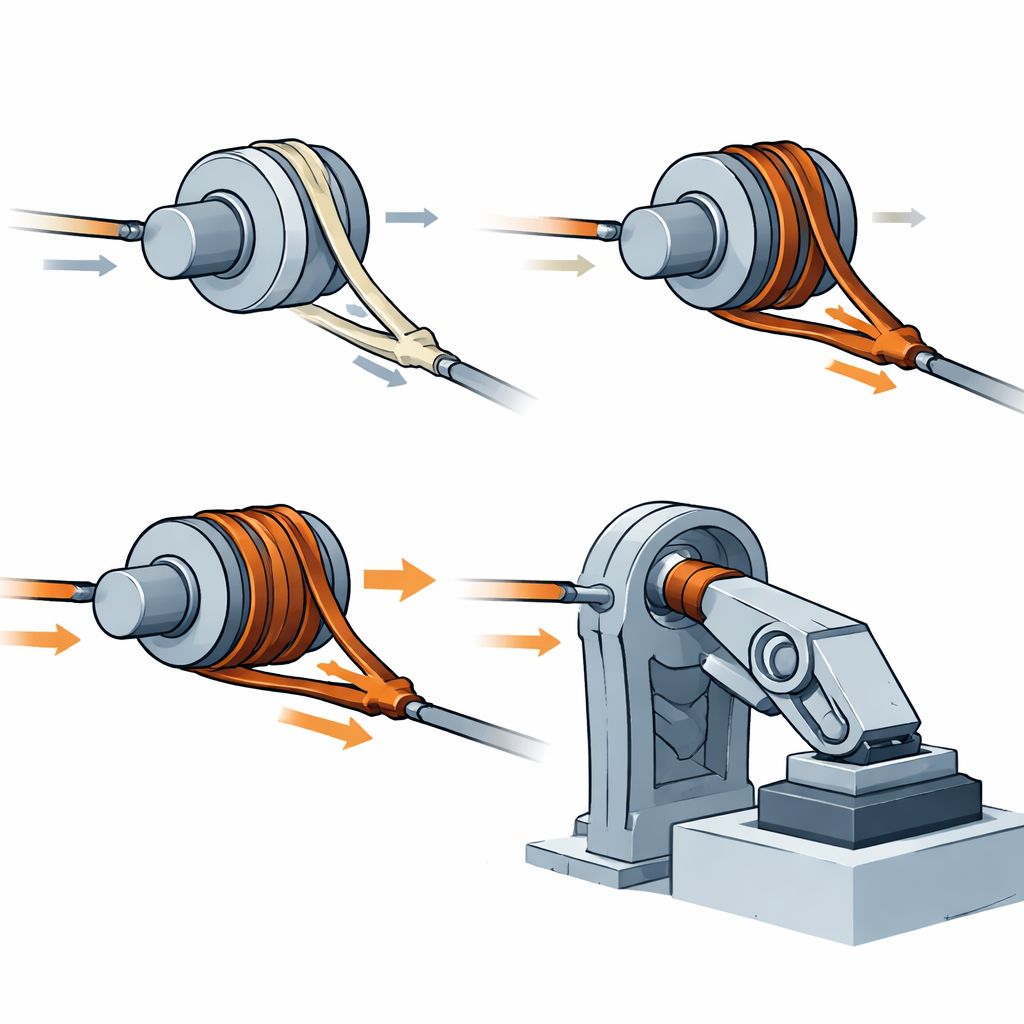
El núcleo del enfoque es explotar el "efecto capstán", el mismo principio que permite a un marinero sostener una carga pesada de cuerda al envolverla alrededor de un poste. Aquí, una tira electroadhesiva delgada se envuelve alrededor de una superficie cilíndrica. El equipo extendió la teoría clásica del capstán para incluir la fuerza normal adicional generada por la atracción electrostática. Su modelo muestra que la fuerza transmitida crece exponencialmente con el ángulo de envolvimiento, pero solo en las regiones donde la tira está deslizando sobre la superficie. Experimentos con envolvimientos de una y varias vueltas confirmaron este comportamiento: a medida que aumenta el número de vueltas, el embrague puede sujetar fuerzas que superan los 100 newton, pero cuando el voltaje está apagado, la fuerza cae a solo unos pocos newton. Imágenes a alta velocidad de la deformación dentro de la tira envuelta revelaron cómo un frente de deslizamiento comienza en el lado de alta tensión y progresa a lo largo del arco conforme aumenta la carga, proporcionando una imagen física de cómo el embrague repartes la carga y dónde es más eficaz.
De pulsos diminutos a agarres suaves y amigables para las personas
Como los embragues se controlan electrónicamente, su fuerza puede moldearse en el tiempo. Los investigadores midieron la rapidez con la que los embragues se activan y desactivan bajo diferentes voltajes y patrones de accionamiento, encontrando que pueden liberarse en solo unos pocos milisegundos y operar eficazmente cerca de 1 kilohertz. Esta velocidad hace posible usar modulación por ancho de pulso: en lugar de dejar el embrague completamente activado, pulsos cortos de encendido y apagado limitan cuánto se tensa el tendón, permitiendo ajustar las fuerzas hasta fracciones de newton. En este régimen de bajo esfuerzo de "deslizamiento", las articulaciones se sienten conformes y son fácilmente movibles, lo que permite que la mano se adapte a los objetos y sea retroaccionada de forma segura por un usuario. Cuando se solicita un acoplamiento continuo, el mismo hardware produce altas fuerzas de sujeción.
Una demostración de dos dedos que cambia de modo bajo demanda
Para probar el concepto a nivel de sistema, el equipo construyó una pinza de dos dedos con tres articulaciones por dedo. Las seis articulaciones comparten un único motor, y cada tendón se controla mediante un par de embragues en la configuración de transferencia de carga—uno para tirar y otro para bloquear. Con pulsos de voltaje de baja ocupación, los dedos se vuelven suavemente conformes: compensan los resortes de retorno, se cierran con delicadeza alrededor de espuma blanda o plástico fino, y pueden retrocederse con pequeñas fuerzas mientras mantienen el contacto. Cuando se activan los embragues exteriores de "enganche", los tendones se bloquean a tierra y la pinza puede sostener cargas superiores a un kilogramo, incluidos objetos pesados en agarres tipo gancho y puño. De forma crucial, sujetar requiere casi ninguna potencia del motor, porque son los embragues—no el motor—los que soportan la carga.
Qué podría significar esto para las manos robóticas futuras
En conjunto, el trabajo muestra que al combinar geometría inteligente, electroadhesión y temporización cuidadosa, es posible construir manos robóticas compactas que abarcan tres órdenes de magnitud en fuerza—from un toque de pluma hasta un agarre firme—mientras siguen siendo retroaccionables y eficientes en consumo. En lugar de añadir más motores y engranajes, los diseñadores pueden compartir un motor entre muchas articulaciones y usar estos embragues de película delgada para decidir cuándo cada dedo debe ser blando y cooperativo o bloqueado y fuerte. Esto apunta hacia futuras manos robóticas más ligeras, más seguras alrededor de las personas y mejor preparadas para manejar la variada y desordenada realidad de los objetos del mundo real.
Cita: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
Palabras clave: pinzas robóticas, embragues electroadhesivos, actuación retroaccionable, efecto capstán, manipulación diestra