Clear Sky Science · ja
キャプスタン増幅型静電吸着クラッチによる強くとも逆駆動可能なロボット
しっかり掴めてなおやわらかく感じられるロボット
熟した桃を繊細につまみ、その直後に重い工具をしっかり保持できるロボットの手を想像してみてください—しかもコンパクトでエネルギー効率が高いまま。 本稿は力の伝達方法を再考することで、そうした手を作る新しい方法を提示します。研究者たちは巧妙な形状設計と電気で制御する摩擦を組み合わせ、薄型で強力かつ人の手のように柔らかく動く機構を実現しました。必要なときは滑らかに許容し、必要なときはしっかりロックする、人間の手に似た振る舞いです。
なぜロボットの手は筋力とやわらかさの両方を必要とするのか
現代のロボットは、人間の手が持つ強さ、速度、感度の組み合わせに苦戦しています。従来の電動モータは十分なトルクを出すために大型のギアボックスを必要とすることが多く、これが重量化、非効率化、そして逆駆動の困難さを招きます。食品の取り扱いや人の補助、壊れやすい物品の梱包などでは、接触時に安全にたわむことができ、かつ位置決め後には確実に保持できることが望まれます。ソフトロボットや空気駆動システム、可変剛性機構といった既存の解は一部を満たしますが、弱い、遅い、多関節への拡張が難しい、などの課題が残ります。
一つのモータを多本の指で共有する新しい方法
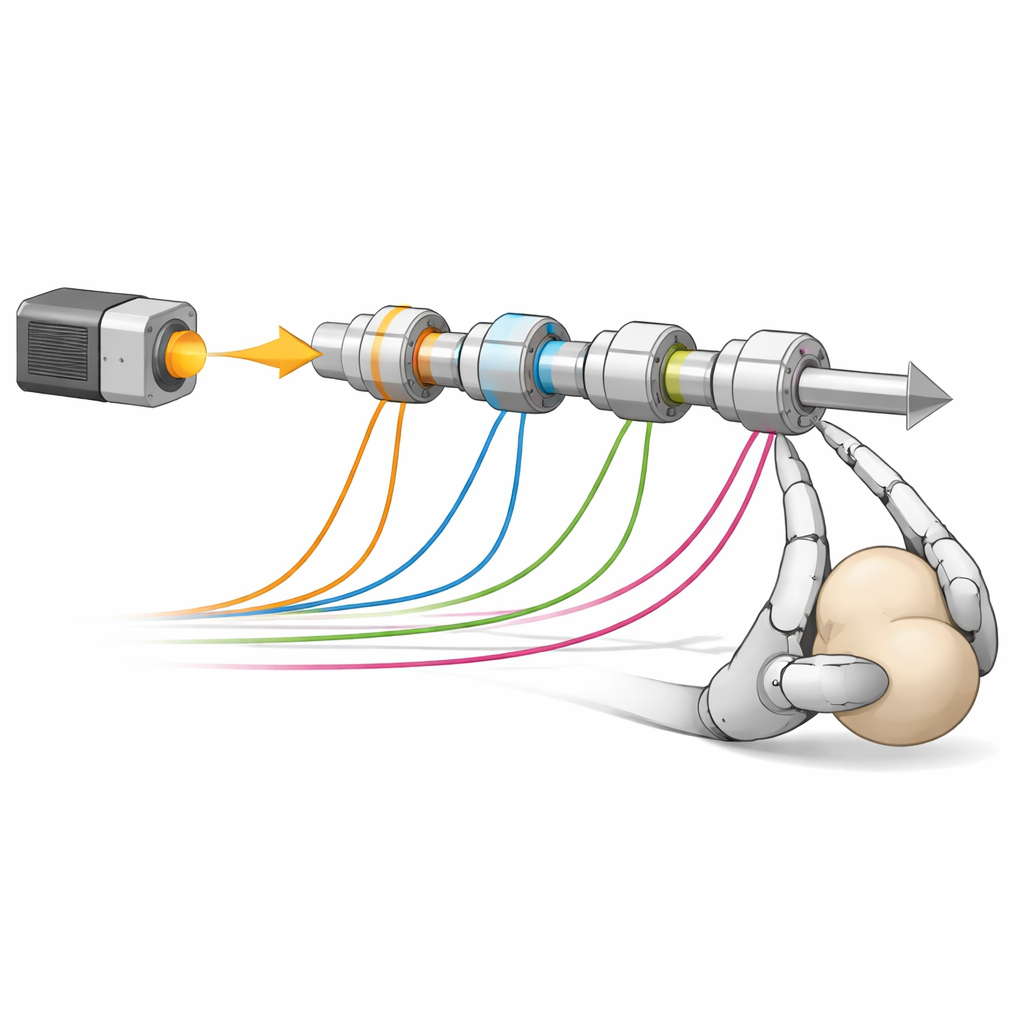
著者らは「電気機械的多重化(electromechanical multiplexing)」という構成を提案します。これは単一のモータで多数の関節を駆動し、駆動力を静電吸着クラッチと呼ぶ特殊なブレーキを通して配分する方式です。腕を通る回転軸に沿って、細い薄膜バンドが複数の円筒に巻かれている様子を想像してください。電圧がオフのときはこれらのバンドはほとんどグリップせず、運動は自由に通過します。電圧が加わると静電吸着によりバンドが張り付き、曲面に沿うラップによって腱に大きな力を伝達できます。クラッチを対で用いることで—一方が軸から腱を引き出し、もう一方がその腱を地面に固定する—各指を柔らかく逆駆動可能な運動フェーズと、モータの負担を増やさずに保持する堅固なフェーズとで切り替えられます。
微小な力を曲面で増幅する
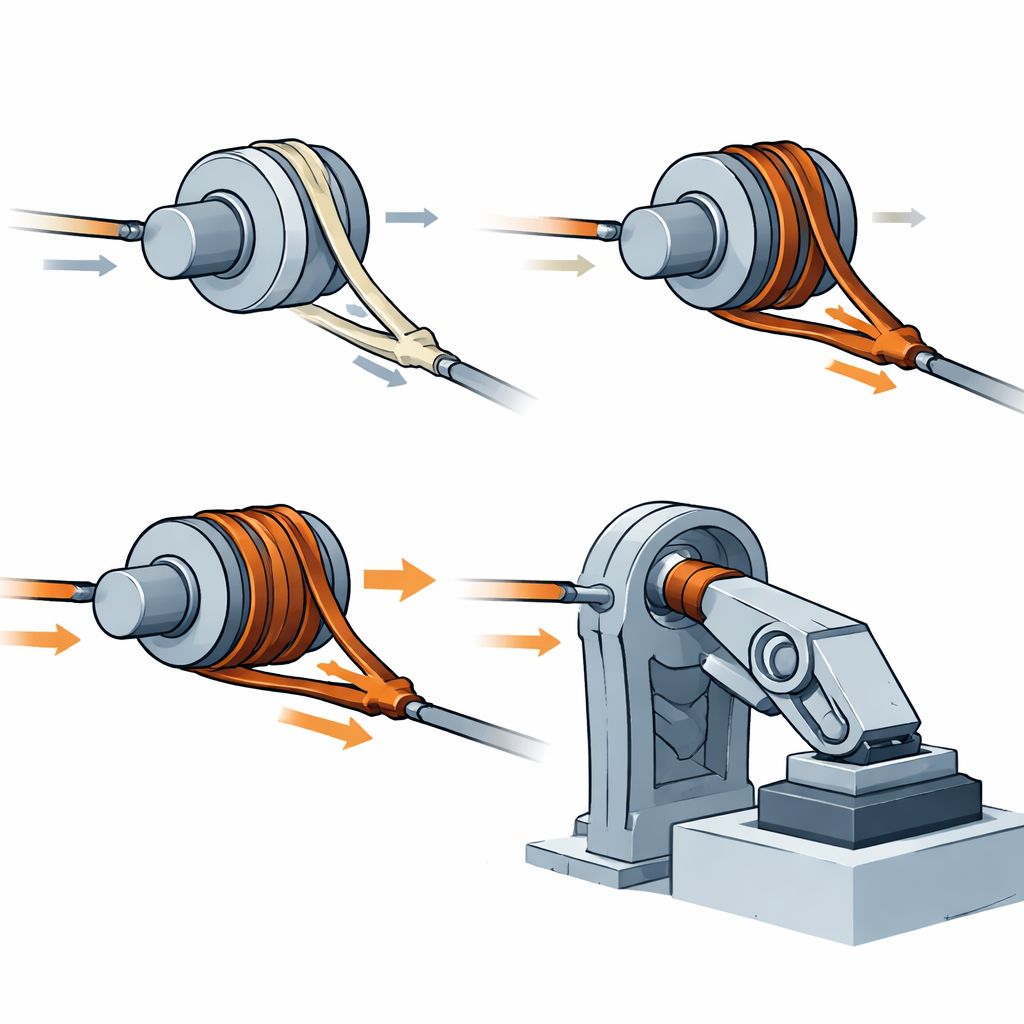
本手法の核心は「キャプスタン効果」を活用する点にあります。これはロープをポストに巻くことで大きな荷重を保持できる原理です。本研究では薄い静電吸着ストリップを円筒に巻き付けます。チームは古典的なキャプスタン理論を、静電吸着が生む追加の法線力を含めるよう拡張しました。モデルは、伝達力が巻き角に対して指数的に増加することを示しますが、それはストリップが表面上で滑っている領域に限られます。単巻・多巻の実験によりこの挙動が確認され、巻き数が増えるほどクラッチは100ニュートンを超える力を保持できる一方で、電圧を切ると力は数ニュートンにまで低下しました。包まれたストリップ内部のひずみを高速撮影した結果、滑り前線が高張力側で始まり荷重増加に従って円弧に沿って進行する様子が明らかになり、クラッチが荷重をどのように分散しどこで有効に働くかの物理像が得られました。
微小パルスから滑らかで人に優しい把持へ
クラッチは電子的に制御されるため、時間的に力の形を整えることができます。研究者たちは様々な電圧と駆動パターン下でクラッチのオン・オフ速度を計測し、数ミリ秒で解放でき、約1キロヘルツ付近で有効に動作することを見いだしました。この速度によりパルス幅変調(PWM)が可能になります。クラッチを完全にオンにし続ける代わりに短いオン・オフのパルスを用いることで腱に蓄積される張力を制限でき、ニュートンの小数分の力まで微調整できます。この低力の「滑り」領域では関節は順応性を示し、少ない力で押し戻すことができるため、物体に沿って手が順応しユーザによる安全な逆駆動を許容します。連続的な係合が命じられれば、同じハードウェアは高い保持力を発揮します。
要求に応じてモードを切り替える二本指デモ
システムレベルで概念を示すため、チームは各指三関節の二本指グリッパを作りました。六つの関節はすべて一つのモータを共有し、各腱は牽引用とロック用の対のクラッチで制御されます。低デューティの電圧パルスでは指は柔らかく順応的になり、復元ばねを補償し、柔らかいフォームや薄いプラスチックを優しく閉じ、接触を保ったまま小さな力で押し戻せます。外側の「ラッチ」クラッチを係合させると腱は地面にロックされ、グリッパはフック掴みやこぶし状の把持で1キログラムを超える荷重を保持できます。重要なのは、保持にほとんどモータ電力が必要ない点で、荷重はモータではなくクラッチが担っています。
将来のロボットハンドに与える意味
総じて、本研究は賢い形状設計、静電吸着、そして精密なタイミング制御を組み合わせることで、羽のように軽い触感から堅固な把持まで、三桁にわたる力のレンジを持ちながら逆駆動可能で電力効率の良いコンパクトなロボットハンドを作れることを示しています。モータとギアを増やす代わりに、一つのモータを多関節で共有し、薄膜クラッチで各指を柔らかく協調させるかロックして強くするかを選べます。これにより将来のロボットハンドはより軽く、人間の周りで安全に振る舞い、現実世界の雑多な物体をよりうまく扱えるようになるでしょう。
引用: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
キーワード: ロボットグリッパー, 静電吸着クラッチ, 逆駆動可能な駆動, キャプスタン効果, 巧緻な操作