Clear Sky Science · sv
Starka men återdrivbara robotar genom kapstan‑förstärkta elektroadhesiva kopplingar
Robotar som kan hålla hårt men ändå upplevas mjuka
Föreställ dig en robothand som varsamt kan gripa ett moget persika och sekunder senare stadigt hålla ett tungt verktyg—allt medan den förblir kompakt och energieffektiv. Denna artikel presenterar ett nytt sätt att bygga sådana händer genom att ompröva hur robotar överför kraft. Forskarna kombinerar smart geometri och elektriskt styrd friktion för att skapa kompakta mekanismer som både är starka och lätta att driva baklänges, ungefär som en mänsklig hand som kan ge efter mjukt men låsa sig när det behövs.
Varför robothänder behöver både muskler och känslighet
Moderna robotar har svårt att nå människohandens kombination av styrka, hastighet och känslighet. Traditionella elektriska motorer behöver ofta klumpiga växellådor för att ge tillräckligt moment, vilket gör dem tunga, ineffektiva och svåra att backdriva—det vill säga svåra för en person eller ett föremål att förflytta genom att trycka mot dem. För uppgifter som hantering av livsmedel, assistans till människor eller packning av känsliga föremål är detta problematiskt: man vill att handen säkert ska ge efter vid kontakt, men också hålla föremål säkert när de väl är placerade. Befintliga lösningar som mjukrobotar, luftdrivna system och variabla stelhetsmekanismer ger delvisa svar men tenderar att vara svaga, långsamma eller svåra att skala upp till många leder.
Ett nytt sätt att dela en motor mellan många fingrar
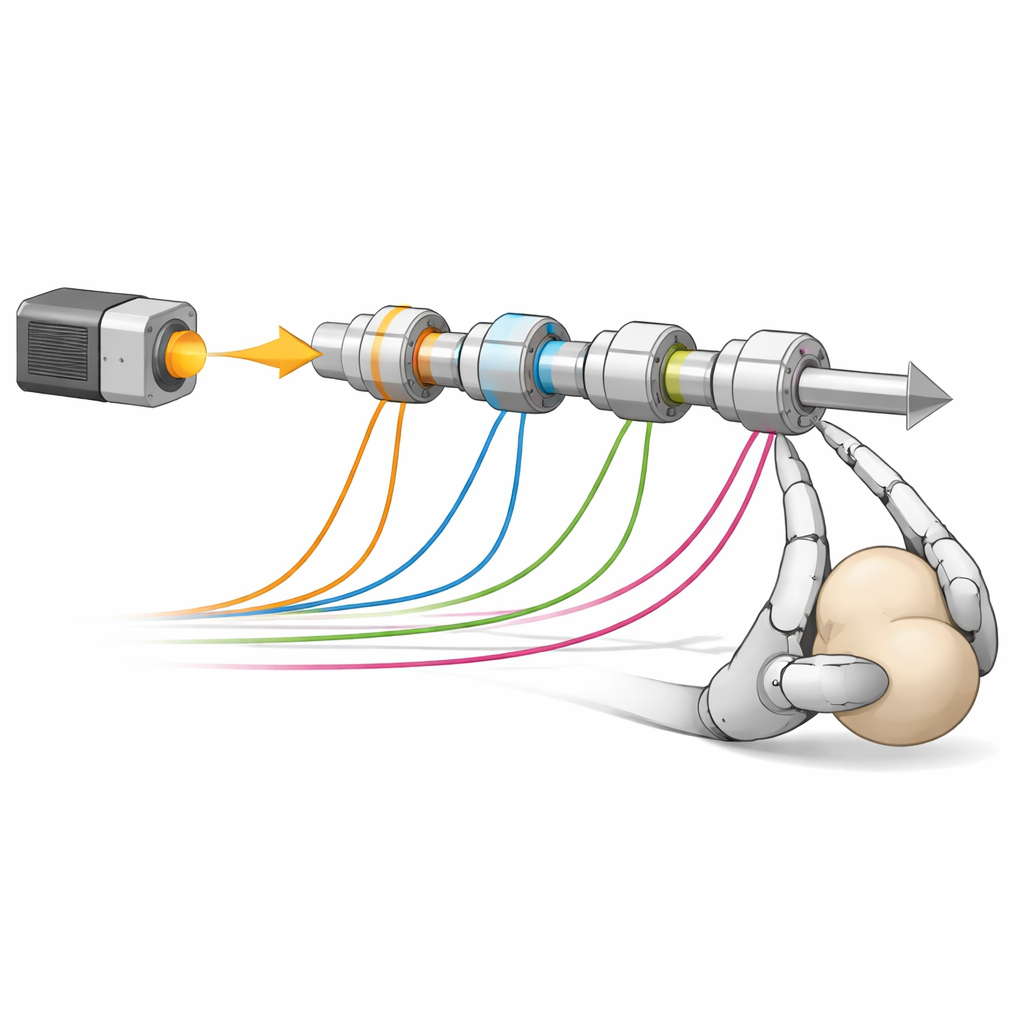
Författarna föreslår en "elektromekanisk multiplexerings"-arkitektur som låter en enda motor driva många leder genom att leda kraften via speciella bromsar kallade elektroadhesiva kopplingar. Tänk dig en roterande axel genom armen, med små, tunna filmband lindade runt cylindrar längs dess längd. När spänningen är av greppar banden knappt ytan, vilket tillåter rörelse att passera fritt. När spänning appliceras gör elektrostatisk attraktion att banden fastnar, så friktion längs den böjda omslutningen kan överföra stora krafter till anslutna senor. Genom att para ihop kopplingar—en för att dra en sena från axeln, en annan för att låsa den senan mot grund—kan systemet växla varje finger mellan en mjuk, återdrivbar rörelsefas och en fast, energieffektiv hållningsfas utan att lämna motorn på hög belastning.
Använda kurvade ytor för att förstärka små krafter
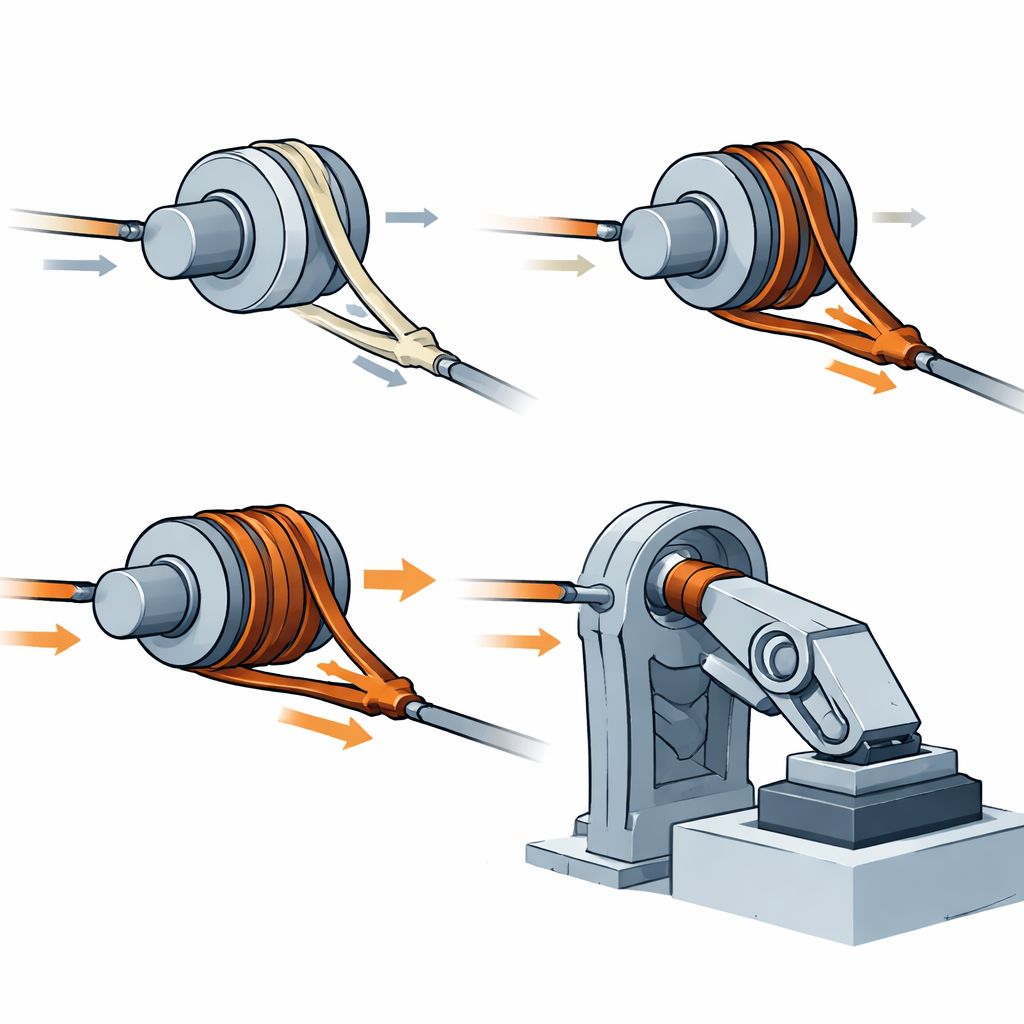
Kärnan i tillvägagångssättet är att utnyttja "kapstan‑effekten", samma princip som låter en sjöman hålla en tung last i ett rep genom att linda det runt en pollare. Här lindas en tunn elektroadhesiv remsa runt en cylindrisk yta. Teamet utvidgade klassisk kapstanteori för att inkludera den extra normalkraft som genereras av elektrostatisk attraktion. Deras modell visar att den överförda kraften växer exponentiellt med omslutningsvinkeln, men endast i de regioner där remsan glider över ytan. Experiment med en- och flervarvsomslag bekräftade detta beteende: när antalet varv ökar kan kopplingen hålla krafter som överstiger 100 newton, men när spänningen är av sjunker kraften till endast några newton. Högfartsinspelning av töjning inne i den lindade remsan avslöjade hur en glidfront startar på högspänningssidan och fortskrider längs bågen när belastningen ökar, vilket ger en fysisk bild av hur kopplingen delar lasten och var den är mest effektiv.
Från korta pulser till mjuka, människovänliga grepp
Eftersom kopplingarna styrs elektroniskt kan deras kraft formas över tiden. Forskarna mätte hur snabbt kopplingarna slår på och av vid olika spänningar och drivmönster och fann att de kan frisättas på bara några millisekunder och fungera effektivt nära 1 kilohertz. Denna hastighet möjliggör användning av pulsbreddsmodulering: istället för att lämna kopplingen fullt på, begränsar korta on–off‑pulser hur mycket spänning som byggs upp i senan, vilket gör att krafterna kan ställas in ner till bråkdelar av en newton. I detta låga‑krafts"slips"‑läge känns lederna följsamma och är lätt att trycka runt, vilket låter handen anpassa sig till föremål och säkert backdrivas av en användare. När kontinuerlig inbindning kommenderas levererar samma hårdvara höga hållkrafter.
En tvåfingrig demo som växlar läge på begäran
För att bevisa konceptet på systemnivå byggde teamet en tvåfingrig gripare med tre leder per finger. Alla sex leder delar en enda motor, och varje sena styrs av ett par kopplingar i lastöverföringskonfiguration—en för att dra, en för att låsa. Med lågpliktiga spänningspulser blir fingrarna mjukt eftergivliga: de kompenserar för returfjädrar, sluter sig försiktigt runt mjumt skum eller tunn plast och kan tryckas tillbaka med små krafter samtidigt som kontakt bibehålls. När de yttre "låsnings"-kopplingarna engageras låses senorna mot grund och griparen kan hålla laster över ett kilogram, inklusive tunga föremål i krok‑ och näve‑liknande grepp. Avgörande är att hållning kräver nästan ingen motorenergi, eftersom kopplingarna—inte motorn—bär lasten.
Vad detta kan innebära för framtida robot‑händer
Sammantaget visar arbetet att genom att kombinera smart geometri, elektroadhesion och noggrann tidsstyrning är det möjligt att bygga kompakta robothänder som täcker tre storleksordningar i kraft—från fjäderlätt beröring till fast grepp—samtidigt som de förblir återdrivbara och energieffektiva. I stället för att lägga till fler motorer och växlar kan konstruktörer dela en motor över många leder och använda dessa tunnfilmskopplingar för att bestämma när varje finger ska vara mjukt och samarbetsvilligt eller låst och starkt. Detta pekar mot framtida robot‑händer som är lättare, säkrare runt människor och bättre rustade att hantera den röriga mångfalden av verkliga föremål.
Citering: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
Nyckelord: robotgrepp, elektroadhesiva kopplingar, återdrivbar drivning, kapstaneffekt, fingertoppsmanipulation