Clear Sky Science · tr
Kapstanla Güçlendirilen Elektroadezif Kavrama ile Hem Güçlü Hem Geri Sürülebilir Robotlar
Sıkıca Tutabilen Ama Yine de Nazik Hissedilebilen Robotlar
Olgun bir şeftaliyi nazikçe kavrayıp, birkaç saniye sonra ağır bir aleti sağlamca tutabilen bir robot el hayal edin—bütün bunları kompakt ve enerji açısından verimli şekilde yapıyor. Bu makale, robotların kuvvet iletimini yeniden düşünerek böyle eller inşa etmenin yeni bir yolunu sunuyor. Araştırmacılar, akıllı geometriyi ve elektrikle kontrol edilen sürtünmeyi birleştirerek, insan elinin gerektiğinde yumuşakça teslim olup gerektiğinde kilitlenebilmesi gibi hem güçlü hem de kolayca itilebilen kompakt mekanizmalar ortaya koyuyorlar.
Robot Ellerin Hem Kas Hem de Yumuşak Dokunuşa Neden İhtiyacı Var
Günümüz robotları, insan elinin güç, hız ve hassasiyet karışımını yakalamakta zorlanıyor. Geleneksel elektrik motorları genellikle yeterli torku üretmek için hantal redüktörlere ihtiyaç duyar; bu da onları ağır, verimsiz ve geri sürülebilirlik açısından zorlu kılar—yani bir kişinin veya nesnenin itmesiyle kolayca hareket ettirilemez hale getirir. Gıda işleme, insanlara yardım etme veya hassas öğeleri paketleme gibi görevler için bu bir sorundur: elde temasa güvenli şekilde izin vermesini, ancak nesne pozisyona getirildiğinde güvenle tutmasını istersiniz. Yumuşak robotlar, hava destekli sistemler ve değişken sertlikli mekanizmalar gibi mevcut çözümler kısmî yanıtlar sunsa da genellikle zayıf, yavaş veya çok eklemlere ölçeklendirmesi zor olma eğilimindedir.
Bir Motora Birden Fazla Parmak Arasında Gücü Paylaştırmanın Yeni Yolu
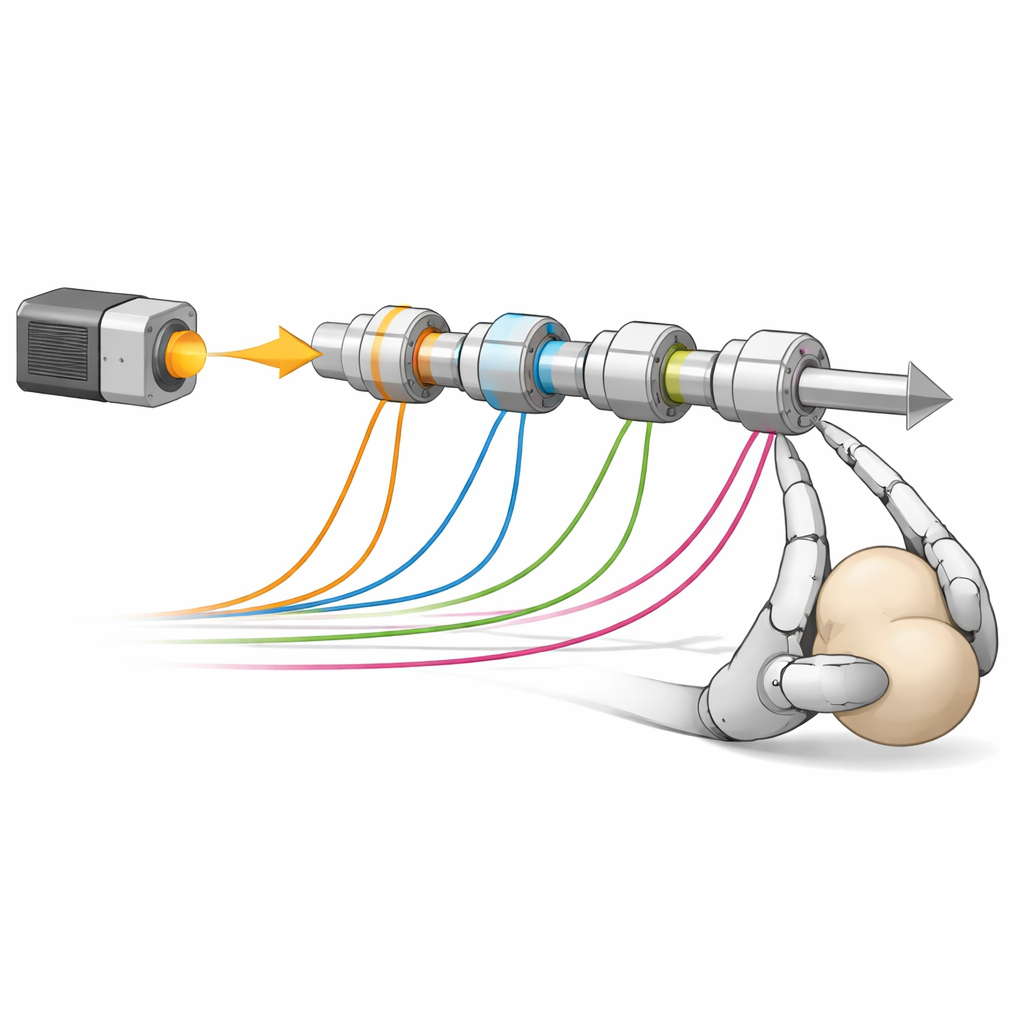
Yazarlar, tek bir motorun gücü birçok ekleme yönlendirmesine izin veren "elektromekanik çoklama" mimarisini öneriyor; güç, elektroadezif kavramalar adı verilen özel frenler üzerinden yönlendiriliyor. Kolu boyunca dönen bir şaftı ve bunun etrafına sarılmış ince film bantlarını düşünebilirsiniz. Voltaj kapalıyken bu bantlar yüzeye neredeyse tutunmaz, hareketin serbestçe geçmesine izin verir. Voltaj uygulandığında elektrostatik çekim bantların yapışmasını sağlar; böylece eğriliğin etrafındaki sarma boyunca sürtünme, eki tendonlara büyük kuvvetler iletebilir. Kavramaları eşleştirerek—bir tane tendonun şafttan çekilmesi için, diğeri tendonun gövdeye kilitlenmesi için—sistem her parmağı yumuşak, geri sürülebilir bir hareket fazı ile motoru zorlamayan, sağlam bir tutma fazı arasında geçiş yaptırabilir.
Küçük Kuvvetleri Büyütmek İçin Eğri Yüzeylerin Kullanılması
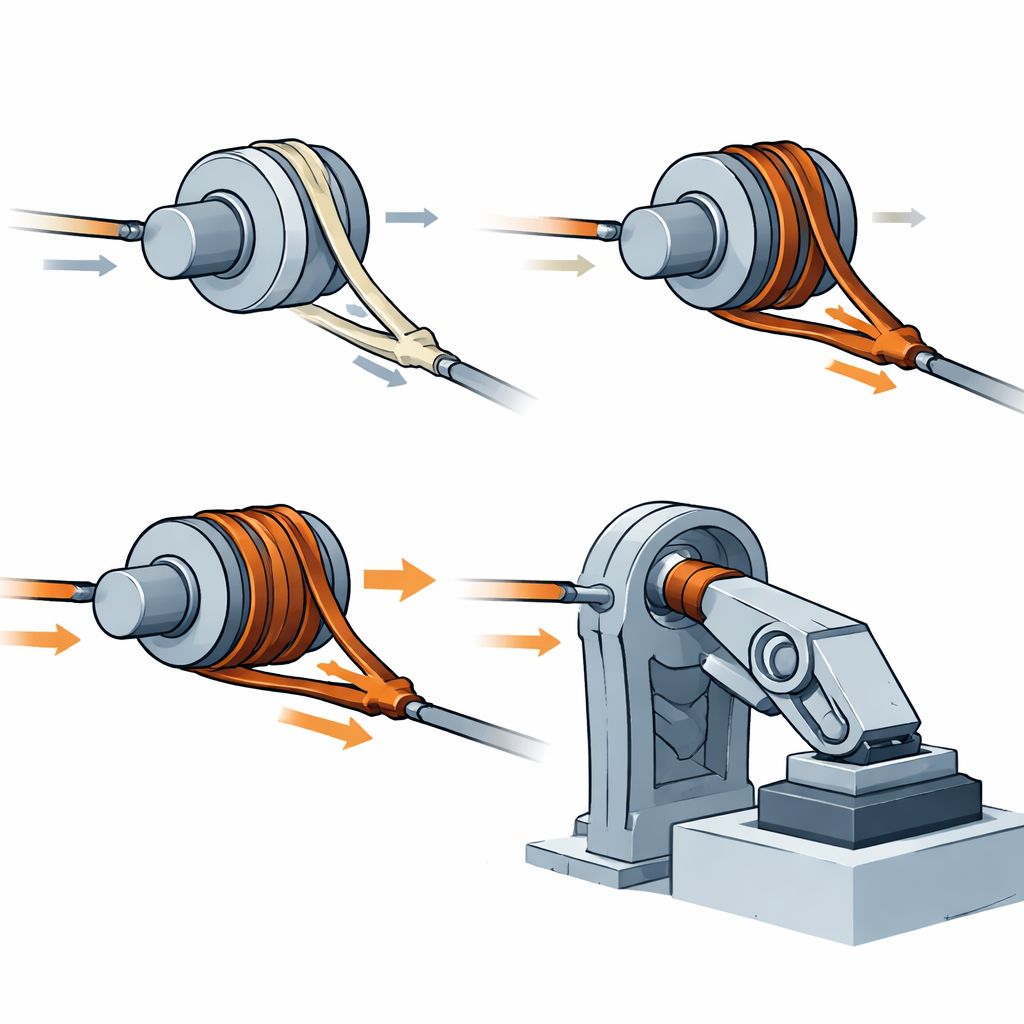
Yaklaşımın özü, bir denizcinin bir ipin ağır yükünü bir direğe sararak tutmasını sağlayanla aynı ilke olan "kapstan etkisinden" yararlanmaktır. Burada ince bir elektroadezif şerit silindirik bir yüzeye sarılır. Ekip, klasik kapstan kuramını elektrostatik çekim tarafından üretilen ekstra normal kuvveti dahil edecek şekilde genişletti. Modelleri, iletilen kuvvetin sarma açısıyla üssel olarak arttığını gösteriyor; fakat bu yalnızca şeridin yüzey üzerinde kaydığı bölgelerde geçerli. Tek ve çok turlu sarmalarla yapılan deneyler bu davranışı doğruladı: tur sayısı arttıkça kavrama 100 newtondan fazla kuvvet tutabiliyor, ancak voltaj kapandığında kuvvet sadece birkaç newtona düşüyor. Sarılı şeridin içindeki gerilimin yüksek hızlı görüntülenmesi, kayma cephesinin yüksek gerilim tarafında nasıl başladığını ve yük arttıkça yayılan yay boyunca nasıl ilerlediğini gösterdi; bu, kavramanın yükü nasıl paylaştığı ve hangi bölgelerde en etkili olduğu hakkında fiziksel bir resim sunuyor.
Minik Darbelerden Pürüzsüz, İnsan Dostu Kavramaya
Kavramalar elektronik olarak kontrol edildiği için kuvvetleri zaman içinde şekillendirilebilir. Araştırmacılar, farklı voltajlar ve sürücü desenleri altında kavramaların ne kadar hızlı açılıp kapandığını ölçtüler; kavramaların yalnızca birkaç milisaniyede serbest bırakılabildiğini ve yaklaşık 1 kilohertz civarında etkili çalışabildiğini buldular. Bu hız, darbe genişlik modülasyonu kullanımını mümkün kılar: kavrama tamamen açık bırakılmak yerine kısa açma-kapama darbeleri tendon üzerindeki gerilimin ne kadar biriktiğini sınırlar ve kuvvetlerin newtonun kesirlerine kadar ayarlanmasına izin verir. Bu düşük kuvvetli "kayma" rejiminde eklemler uyumlu hisseder ve kolayca itilebilir; böylece el nesnelere uyum sağlayabilir ve kullanıcı tarafından güvenli şekilde geri sürülebilir. Sürekli kavrama komutu verildiğinde aynı donanım yüksek tutma kuvvetleri üretir.
İsteğe Bağlı Mod Değiştiren İki Parmaklı Bir Demo
Kavramsal fikri sistem seviyesinde kanıtlamak için ekip, her parmakta üç eklem bulunan iki parmaklı bir kavrayıcı inşa etti. Tüm altı eklem tek bir motoru paylaşıyor ve her tendon yük aktarım konfigürasyonunda bir çift kavrama ile kontrol ediliyor—biri çekme, diğeri kilitleme için. Düşük görevli voltaj darbeleriyle parmaklar yumuşakça uyumlu hale geliyor: dönüş yaylarının etkisini telafi ediyor, yumuşak köpük veya ince plastik etrafında nazikçe kapanıyor ve küçük kuvvetlerle geri itilse bile teması koruyor. Dıştaki "kilitleme" kavramaları etkinleştirildiğinde tendonlar gövdeye kilitleniyor ve kavrayıcı bir kilogramın üzerinde yükleri, kanca veya yumruk benzeri tutuşlarla tutabiliyor. Önemli olan, tutmanın neredeyse hiç motor gücü gerektirmemesi; çünkü yükü taşıyan motor değil, kavramalar oluyor.
Geleceğin Robot Elleri İçin Anlamı
Genel olarak, çalışma akıllı geometri, elektroadezyon ve dikkatli zamanlamayı birleştirerek tüy hafif temasdan sağlam kavramaya kadar üç büyüklük mertebesinde kuvveti kapsayan, aynı zamanda geri sürülebilir ve enerji verimli kompakt robotik eller inşa etmenin mümkün olduğunu gösteriyor. Daha fazla motor ve dişli eklemek yerine tasarımcılar bir motoru birçok eklem arasında paylaşabilir ve bu ince film kavramaları her bir parmağın ne zaman yumuşak ve işbirlikçi ya da kilitli ve güçlü olması gerektiğine karar vermek için kullanabilir. Bu, daha hafif, insan çevresinde daha güvenli ve gerçek dünya nesnelerinin karmaşık çeşitliliğini daha iyi işleyebilen geleceğin robotik ellerine işaret ediyor.
Atıf: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
Anahtar kelimeler: robotik kavrayıcılar, elektroadezif kavramalar, geri sürülebilir aktüasyon, kapstan etkisi, ustalıkla manipülasyon