Clear Sky Science · he
רובוטים חזקים אך ניתנים להנעה חיצונית באמצעות מצמדים אלקטרו‑דביקים מוגברים באפקט קפסטן
רובוטים שיכולים להדק בחוזקה ועדיין להרגיש עדינים
דמיינו יד רובוטית שיכולה לאחוז בעדינות אפרסק בשל ואז, רגעים לאחר מכן, להחזיק בחוזקה כלי כבד — וכל זאת בגודל קומפקטי וצריכת אנרגיה יעילה. המאמר מציג שיטה חדשה לבניית ידיים כאלו על ידי חשיבה מחדש על הדרך שבה רובוטים מעבירים כוח. החוקרים משלבים גאומטריה חכמה וחיכוך הנשלט חשמלית כדי ליצור מנגנונים דקים שהם גם חזקים וגם קלים להנעה חיצונית, בדומה ליד אנושית שיכולה לתת בעדינות אך גם לנעול במקומה כשצריך.
מדוע ידיים רובוטיות צריכות גם כוח וגם מגע רך
רובוטים מודרניים מתקשים להשוות את שילוב הכוח, המהירות והחישה של היד האנושית. מנועים חשמליים מסורתיים זקוקים לעתים לתיבות הילוכים מסורבלות כדי להפיק מומנט מספק, מה שהופך אותם לכבדים, בלתי יעילים וקשים להנעה חיצונית — כלומר קשה להזיזם על ידי אדם או חפץ שדוחף נגדם. במשימות כמו טיפול במזון, סיוע לאנשים או אריזה של פריטים עדינים, זו בעיה: רוצים שהיד תוותר בבטחה בעת מגע, אך גם תחזיק עצמים מבלי להחליק אחרי מיקום. פתרונות קיימים כמו רובוטים רכים, מערכות מנועי אוויר ומנגנוני קשיחות משתנה נותנים מענה חלקי אך נוטים להיות חלשים, איטיים או קשים להרחבה למספר מפרקים רב.
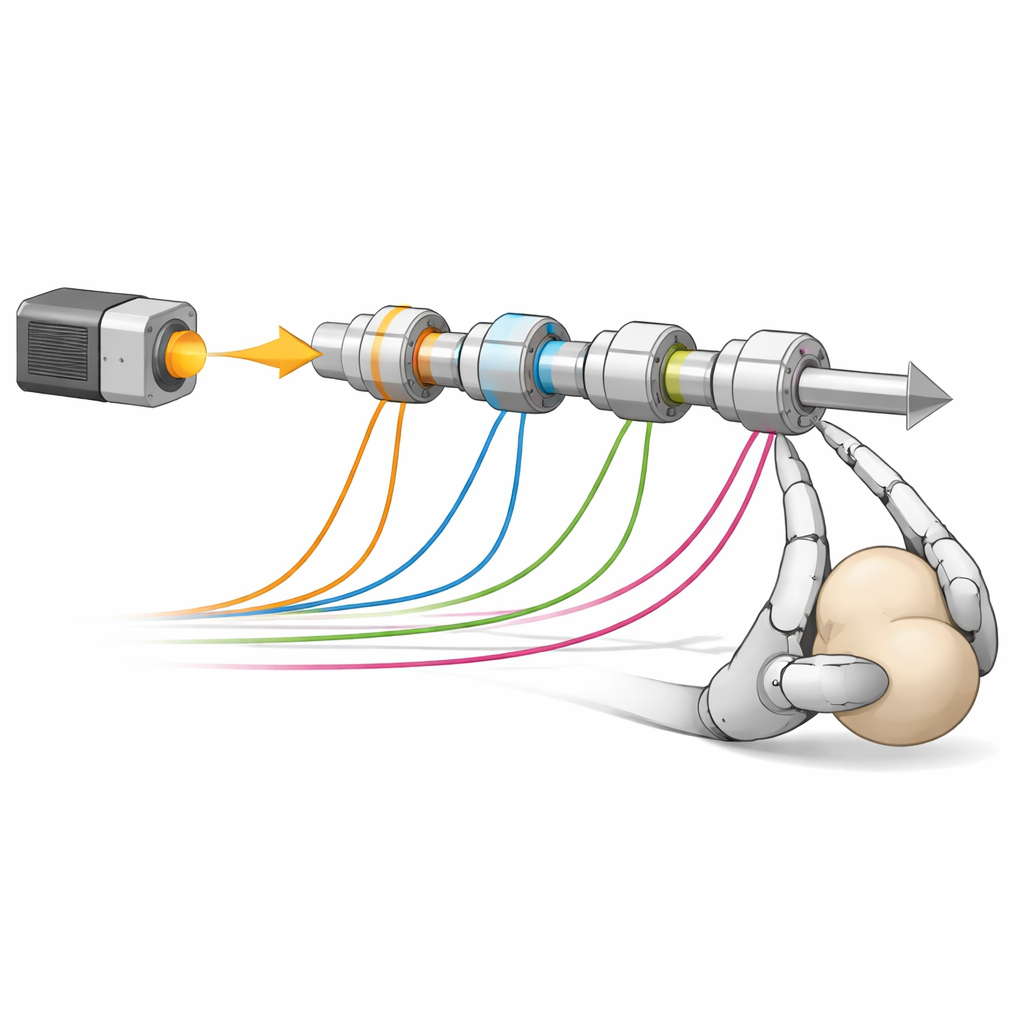
דרך חדשה לשיתוף מנוע יחיד בין אצבעות רבות
המחברים מציעים ארכיטקטורת "מולטי‑פלקס חשמטרית" שמאפשרת למנוע יחיד להניע מפרקים רבים על ידי ניתוב כוח דרך בלמים מיוחדים הנקראים מצמדים אלקטרו‑דביקים. חשבו על ציר מסתובב החוצה לאורך הזרוע, עם סרטים דקים העוטפים גלילים על פני האורך. כשהמתח כבוי, הסרטים כמעט ואינם מאחיזים את המשטח, ומאפשרים תנועה חופשית. כשהמתח מופעל, משיכה אלקטרוסטטית גורמת לסרטים להידבק, כך שהחיכוך לאורך העטיפה יכול להעביר כוחות גדולים לגידים המחוברים. על ידי שילוב מצמדים בזוגות — אחד למשיכת גיד מהציר ואחד לנעילת אותו גיד לקרקע — המערכת יכולה להעביר כל אצבע בין שלב תנועה רכה וניתנת להנעה חיצונית לבין שלב אחיזה חזק ויעיל אנרגטית, בלי להשאיר את המנוע בעבודה קשה.
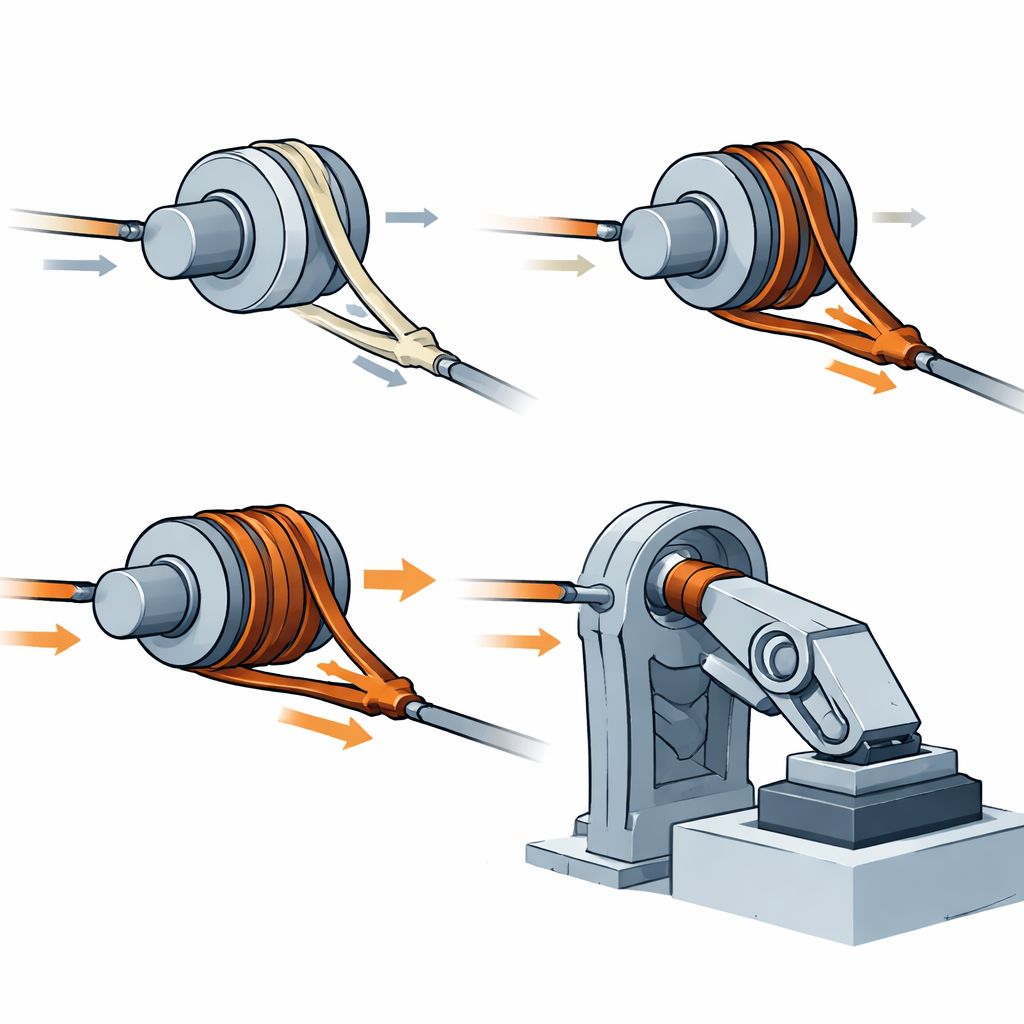
שימוש במשטחים מעוקלים להגברה של כוחות זעירים
עיקר הגישה היא ניצול "אפקט הקפסטן", אותו עיקרון שמאפשר למלח להחזיק עומס כבד של חבל על ידי עיטופו סביב עמוד. כאן סרט אלקטרו‑דביק דק נעטף סביב משטח גלילי. הצוות הרחיב את תורת הקפסטן הקלאסית כדי לכלול את הכוח הנורמלי הנוסף שנוצר על‑ידי המשיכה האלקטרוסטטית. המודל שלהם מראה שהכוח המועבר גדל באופן מעריכי עם זווית העטיפה, אך רק באזורים שבהם הסרט מחליק על המשטח. ניסויים בעטיפות חד־סיבוביות ורב‑סיבוביות אישרו התנהגות זו: ככל שמספר הסיבובים גדל, המצמד יכול להחזיק כוחות העולים על 100 ניוטון, אך כשהמתח כבוי הכוח יורד רק לעשרות ניוטונים בודדים. צילום מהיר של המתיחה בתוך הסרט העטוף חשף כיצד חזית החלקה מתחילה בצד המתח הגבוה ומתקדמת לאורך הקשת ככל שהעומס עולה, וסיפק תמונה פיזיקלית של אופן חלוקת העומס והאזורים היעילים ביותר של המצמד.
מפולסים זעירים לאחיזה חלקה וידידותית לאדם
מכיוון שהמצמדים נשלטים אלקטרונית, ניתן לעצב את הכוח שלהם בזמן. החוקרים מדדו כמה מהר המצמדים נדלקים וכבהים תחת מתחים ודפוסי הפעלה שונים, ומצאו שהם יכולים להשתחרר בתוך מילישניות ספורות ולפעול ביעילות בסביבת קילוהרץ אחד. מהירות זו מאפשרת שימוש בהמודולציה של רוחב הדופק: במקום להשאיר את המצמד דולק במלואו, פולסים קצרים של דלוק‑כבוי מגבילים את כמות המתח הנבנית בגיד, ומאפשרים לכוונן כוחות עד לשברים של ניוטון. במשטר החלקה זה בעל הכוחות הנמוכים, המפרקים מרגישים גמישים וניתנים לדחיפה בקלות, מה שמאפשר ליד להיקלט על חפצים ולהיות מאותגרת בבטחה על‑ידי משתמש. כאשר ניתנת פקודה להנעה רציפה, אותו חומרה מייצרת כוחות אחיזה גבוהים.
דמו דו‑אצבעי שמחליף מצבים על פי דרישה
כדי להוכיח את הרעיון ברמה המערכתית, הצוות בנה מחזיק דו‑אצבעי עם שלשה מפרקים לאצבע. כל ששת המפרקים שותפים למנוע יחיד, וכל גיד נשלט על‑ידי זוג מצמדים בתצורת העברת עומס — אחד למשיכה, אחד לנעילה. עם פולסי מתח בתדירות נמוכה, האצבעות הופכות לצמיגות בעדינות: הן מפצות על קפיצי החזרה, נסגרות בעדינות סביב קצף רך או פלסטיק דק, וניתן לדחוף אותן בחוזקות קטנות תוך שמירה על מגע. כאשר מצמדי ה'נעילה' החיצוניים מועסקים, הגידים ננעלים לקרקע והאחיזה יכולה להחזיק עומסים של מעל קילוגרם, כולל חפצים כבדים באחיזות ווי וקומץ. והחשוב — ההחזקה דורשת כמעט אפס כוח מנוע, כי המצמדים — לא המנוע — נושאים את העומס.
מה המשמעות של זה לידיים רובוטיות בעתיד
בסך הכל, המחקר מראה כי על‑ידי שילוב גאומטריה חכמה, אלקטרו‑דביקות ותזמון מתוכנן, ניתן לבנות ידיים רובוטיות קומפקטיות שמכסות שלושה סדרי גודל בכוח — ממגע נוצתי ועד אחיזה חזקה — תוך שמירה על יכולת הנעה חיצונית ויעילות אנרגטית. במקום להוסיף יותר מנועים ותיבות הילוכים, מעצבים יכולים לשתף מנוע יחיד בין מפרקים רבים ולהשתמש במצמדי הקרום הדקים האלו כדי להחליט מתי כל אצבע צריכה להיות רכה ושיתופית או נעולה וחזקה. זה מצביע על ידיים רובוטיות עתידיות שיהיו קלות יותר, בטוחות יותר בסביבת אדם וטובות יותר בטיפול במגוון המוטרד של חפצים מהעולם האמיתי.
ציטוט: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
מילות מפתח: קלטניקים רובוטיים, מצמדים אלקטרו‑דביקים, הנעה הניתנת להנעה חיצונית, אפקט קפסטן, מניפולציה דקסטרית