Clear Sky Science · ru
Прочные, но обратимо приводимые роботы с помощью электродрейфных сцеплений, усиленных эффектом капстана
Роботы, которые могут крепко держать и при этом оставаться деликатными
Представьте себе роботизированную руку, которая может осторожно схватить спелый персик и затем, через мгновение, надёжно удерживать тяжёлый инструмент — при этом оставаясь компактной и энергоэффективной. В этой статье предложен новый способ создания таких рук через переосмысление передачи силы в роботе. Исследователи комбинируют продуманную геометрию и электрически управляемое трение, чтобы получить компактные механизмы, которые одновременно прочны и легко поддаются внешнему воздействию, подобно человеческой руке, которая может мягко уступать и при необходимости блокироваться.
Почему роботизированной руке нужны и сила, и мягкое прикосновение
Современные роботы трудно сопоставить с человеческой рукой по сочетанию силы, скорости и чувствительности. Традиционные электродвигатели часто требуют громоздких редукторов, чтобы обеспечить достатующий крутящий момент, что делает их тяжёлыми, неэффективными и сложными для обратного привода — то есть для перемещения человеком или объектом путём прилагаемого усилия. Для задач вроде обращения с продуктами питания, помощи людям или упаковки деликатных предметов это проблема: рука должна безопасно уступать при контакте, но также надёжно фиксировать предметы после позиционирования. Существующие решения — мягкие роботы, пневматические системы и механизмы переменной жёсткости — дают частичные ответы, но обычно оказываются слабыми, медленными или трудными для масштабирования на множество суставов.
Новый способ приводить в действие много пальцев от одного мотора
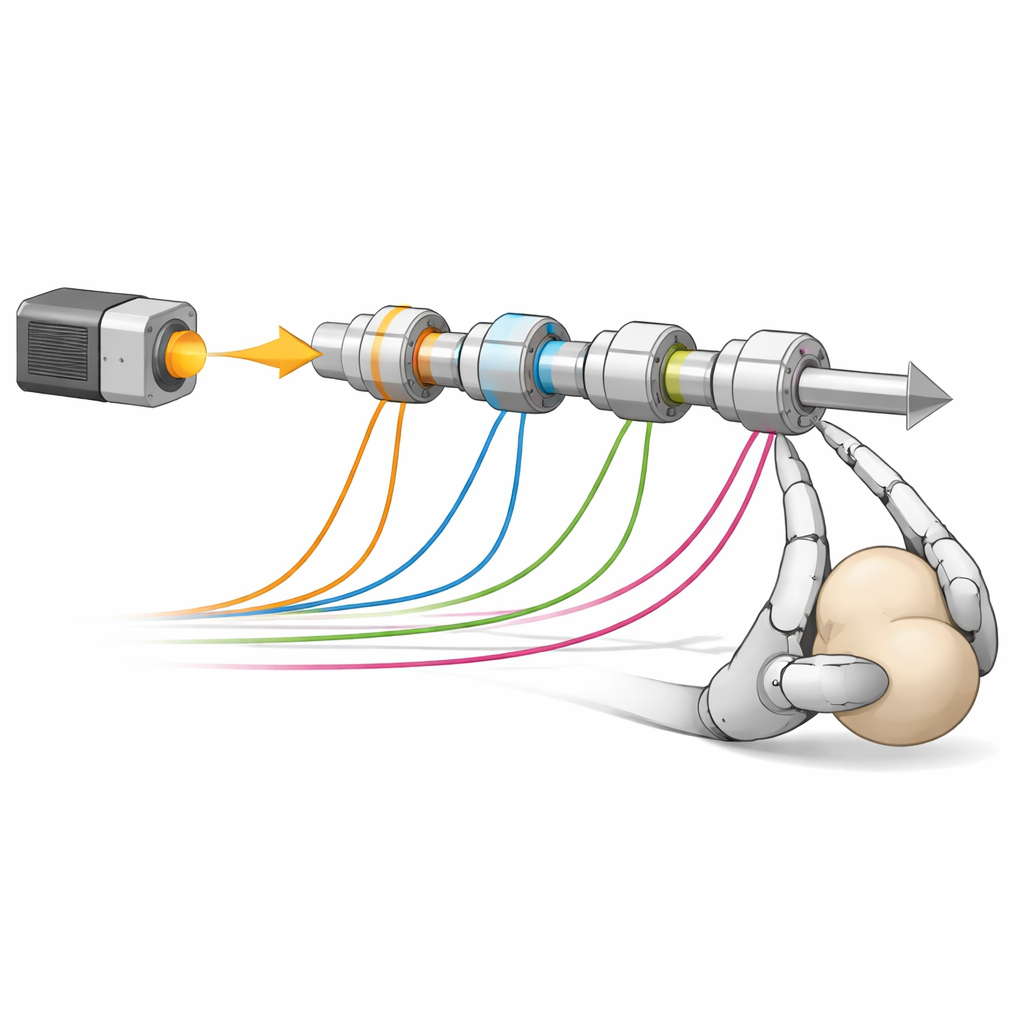
Авторы предлагают архитектуру «электромеханического мультиплексирования», которая позволяет одному мотору приводить в движение множество суставов, протягивая мощность через специальные тормоза — электроадгезионные сцепления. Представьте вращающийся вал, проходящий по длине руки, с тонкими плёночными лентами, обёрнутыми вокруг цилиндров на всём протяжении. Когда напряжение отключено, эти ленты слабо сцепляются с поверхностью, позволяя движению свободно проходить. При подаче напряжения электростатическое притяжение заставляет ленты «прилипать», так что трение вдоль изогнутой обмотки может передавать большие силы на прикреплённые тендоны. Сочетая сцепления попарно — одно тянет тендон от вала, другое фиксирует этот тендон относительно корпуса — система может переключать каждый палец между мягкой, обратимо приводимой фазой движения и прочной, энергоэффективной фазой удержания, не заставляя мотор работать в постоянном тяжёлом режиме.
Использование изогнутых поверхностей для усиления малых усилий
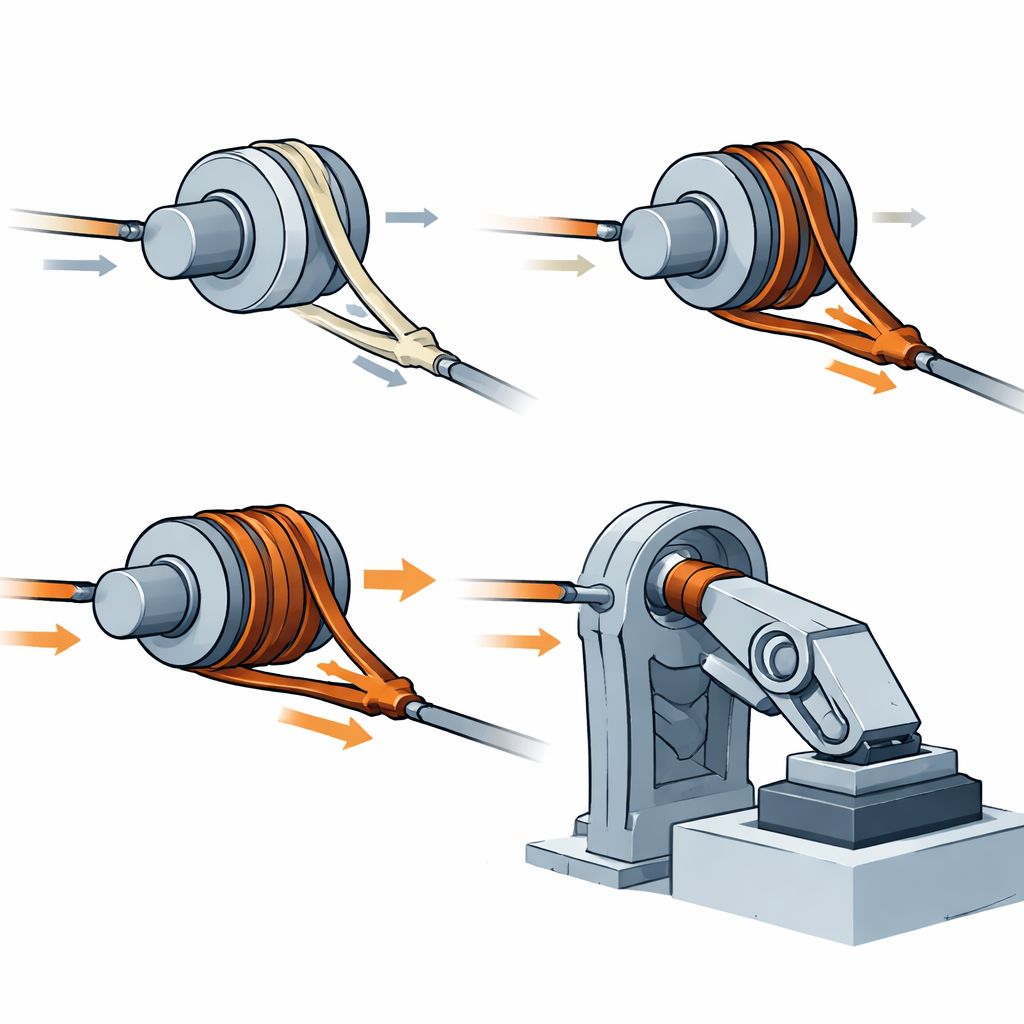
Суть подхода — использование «эффекта капстана», того же принципа, который позволяет моряку удерживать тяжёлую нагрузку на канате, обмотав её вокруг столба. Здесь тонкая электроадгезионная полоса обёрнута вокруг цилиндрической поверхности. Команда расширила классическую теорию капстана, включив дополнительную нормальную силу, создаваемую электростатическим притяжением. Их модель показывает, что передаваемая сила растёт экспоненциально с углом обмотки, но только в областях, где полоса скользит по поверхности. Эксперименты с одно- и многократными обмотками подтвердили это поведение: с увеличением числа витков сцепление может удерживать силы, превышающие 100 ньютонов, тогда как при выключенном напряжении сила падает до нескольких ньютонов. Высокоскоростная съёмка деформации внутри обёрнутой полосы показала, как фронт проскальзывания начинается на стороне с высоким натяжением и распространяется по дуге по мере роста нагрузки, давая физическую картину того, как сцепление распределяет нагрузку и где оно наиболее эффективно.
От коротких импульсов к плавному, дружелюбному для человека захвату
Поскольку сцепления управляются электронно, их сила может изменяться во времени. Исследователи измерили, как быстро сцепления включаются и выключаются при разных напряжениях и режимах управления, обнаружив, что они могут отпускаться всего за несколько миллисекунд и эффективно работать вблизи частоты 1 килогерц. Эта скорость делает возможным использование широтно-импульсной модуляции: вместо того чтобы держать сцепление постоянно включенным, короткие on–off импульсы ограничивают накопление напряжения в тендоне, позволяя настроить силы до долей ньютона. В этом низко-силовом режиме «проскальзывания» суставы кажутся податливыми и легко поддаются внешнему воздействию, позволяя руке адаптироваться к объекту и безопасно быть обратно приводимой пользователем. При команде на непрерывное включение то же самое оборудование даёт высокие удерживающие силы.
Демонстрация на двух пальцах, переключающая режимы по требованию
Чтобы подтвердить концепцию на уровне системы, команда построила двухпалый грейфер с тремя суставами на каждый палец. Все шесть суставов работают от одного мотора, и каждый тендон управляется парой сцеплений в конфигурации передачи нагрузки — одно для подтягивания, другое для блокировки. При низкой скважности напряжения пальцы становятся мягко податливыми: они компенсируют возвратные пружины, аккуратно смыкаются вокруг мягкой пены или тонкого пластика и могут быть отведены назад малыми усилиями, сохраняя контакт. Когда внешние «фиксирующие» сцепления включаются, тендоны закрепляются относительно корпуса, и захват может удерживать грузы свыше килограмма, включая тяжёлые объекты в крюк- и кулачковом захвате. Важно, что удержание почти не требует мощности мотора, поскольку нагрузку несут сцепления, а не мотор.
Что это может означать для будущих роботизированных рук
В целом, работа показывает, что комбинация продуманной геометрии, электроадгезии и точного временного управления позволяет создавать компактные роботизированные руки, охватывающие три порядка величины по силе — от перьезвучного прикосновения до прочного захвата — оставаясь при этом обратно приводимыми и энергоэффективными. Вместо того чтобы добавлять больше моторов и передач, разработчики могут делить один мотор между множеством суставов и использовать эти тонкоплёночные сцепления, чтобы решать, когда каждый палец должен быть мягким и кооперативным, а когда — зафиксированным и сильным. Это указывает на будущее, где роботизированные руки будут легче, безопаснее для людей и лучше приспособлены к хаотичному разнообразию реальных объектов.
Цитирование: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
Ключевые слова: роботизированные захваты, электроадгезионные сцепления, обратно приводимая активация, эффект капстана, ловкая манипуляция