Clear Sky Science · fr
Robots à la fois puissants et rétro‑activables grâce à des embrayages électroadhésifs amplifiés par effet capstan
Des robots qui tiennent fermement tout en restant doux au toucher
Imaginez une main robotique capable de saisir délicatement une pêche mûre puis, quelques instants plus tard, de tenir fermement un outil lourd — le tout en restant compacte et économe en énergie. Cet article présente une nouvelle manière de construire de telles mains en repensant la transmission de la force. Les chercheurs combinent une géométrie astucieuse et une friction commandée électriquement pour créer des mécanismes compacts à la fois puissants et faciles à déplacer, un peu comme une main humaine qui peut céder en douceur mais se verrouiller quand c’est nécessaire.
Pourquoi les mains robotiques ont besoin à la fois de force et de délicatesse
Les robots modernes peinent à égaler le mélange de puissance, de rapidité et de sensibilité de la main humaine. Les moteurs électriques classiques nécessitent souvent des boîtes de vitesses volumineuses pour produire le couple suffisant, ce qui les rend lourds, inefficaces et difficiles à rétro‑activer — c’est‑à‑dire difficiles à déplacer par poussée externe. Pour des tâches comme la manipulation d’aliments, l’assistance aux personnes ou le conditionnement d’objets fragiles, c’est problématique : on veut que la main cède en toute sécurité au contact, tout en maintenant les objets solidement une fois positionnés. Les solutions existantes — robots mous, systèmes pneumatiques ou mécanismes à raideur variable — apportent des réponses partielles mais sont souvent faibles, lentes ou difficiles à étendre à de nombreuses articulations.
Une nouvelle façon de partager un moteur entre plusieurs doigts
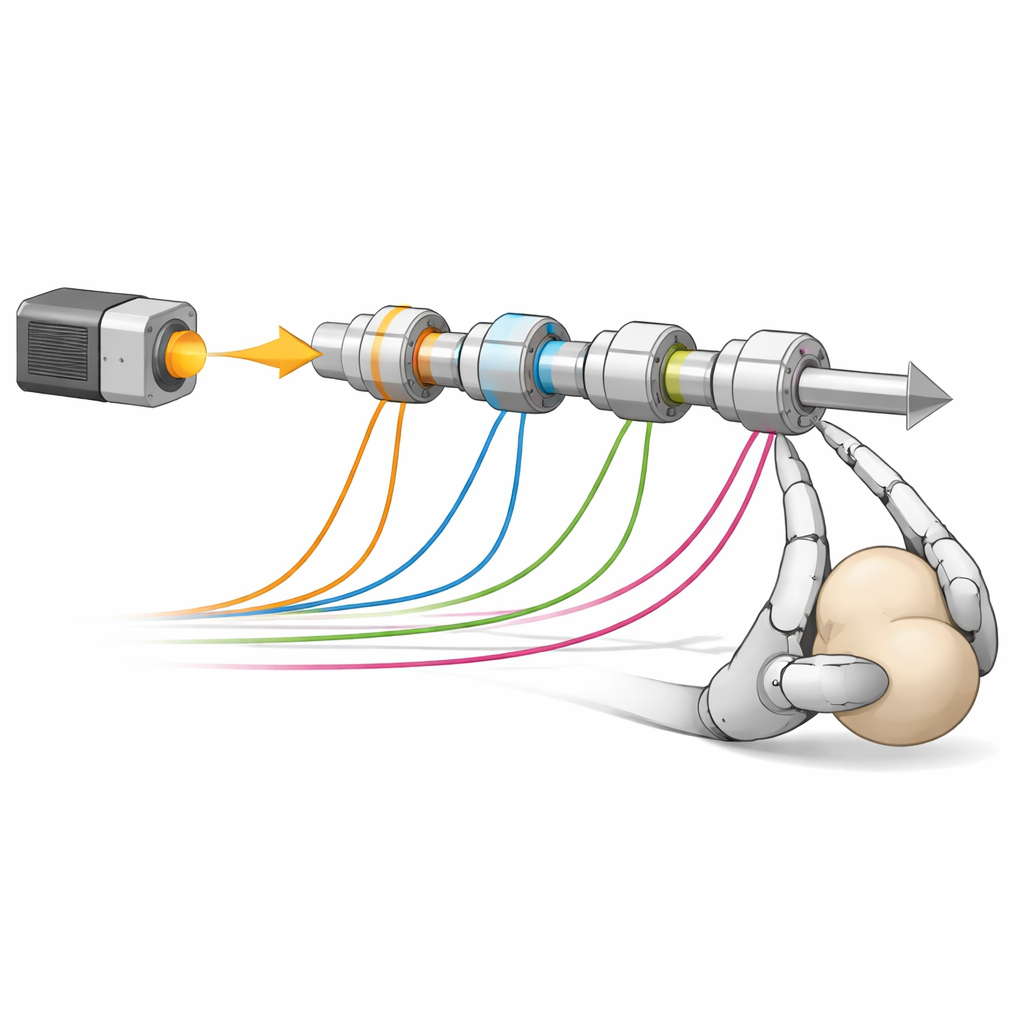
Les auteurs proposent une architecture d’« multiplexage électromécanique » qui permet à un seul moteur d’actionner de nombreuses articulations en routant la puissance via des freins spéciaux appelés embrayages électroadhésifs. Imaginez un arbre tournant le long du bras, avec de petites bandes en film mince enroulées autour de cylindres le long de sa longueur. Lorsque la tension est coupée, ces bandes adhèrent très peu à la surface, laissant le mouvement passer librement. Lorsque la tension est appliquée, l’attraction électrostatique fait coller les bandes, de sorte que la friction le long de l’enroulement courbe peut transmettre de grandes forces aux tendons attachés. En associant des embrayages — l’un pour tirer un tendon depuis l’arbre, l’autre pour l’arrimer au sol — le système peut commuter chaque doigt entre une phase douce et rétro‑activable et une phase de maintien ferme et économe en énergie, sans que le moteur travaille en permanence.
Utiliser des surfaces courbes pour amplifier de faibles forces
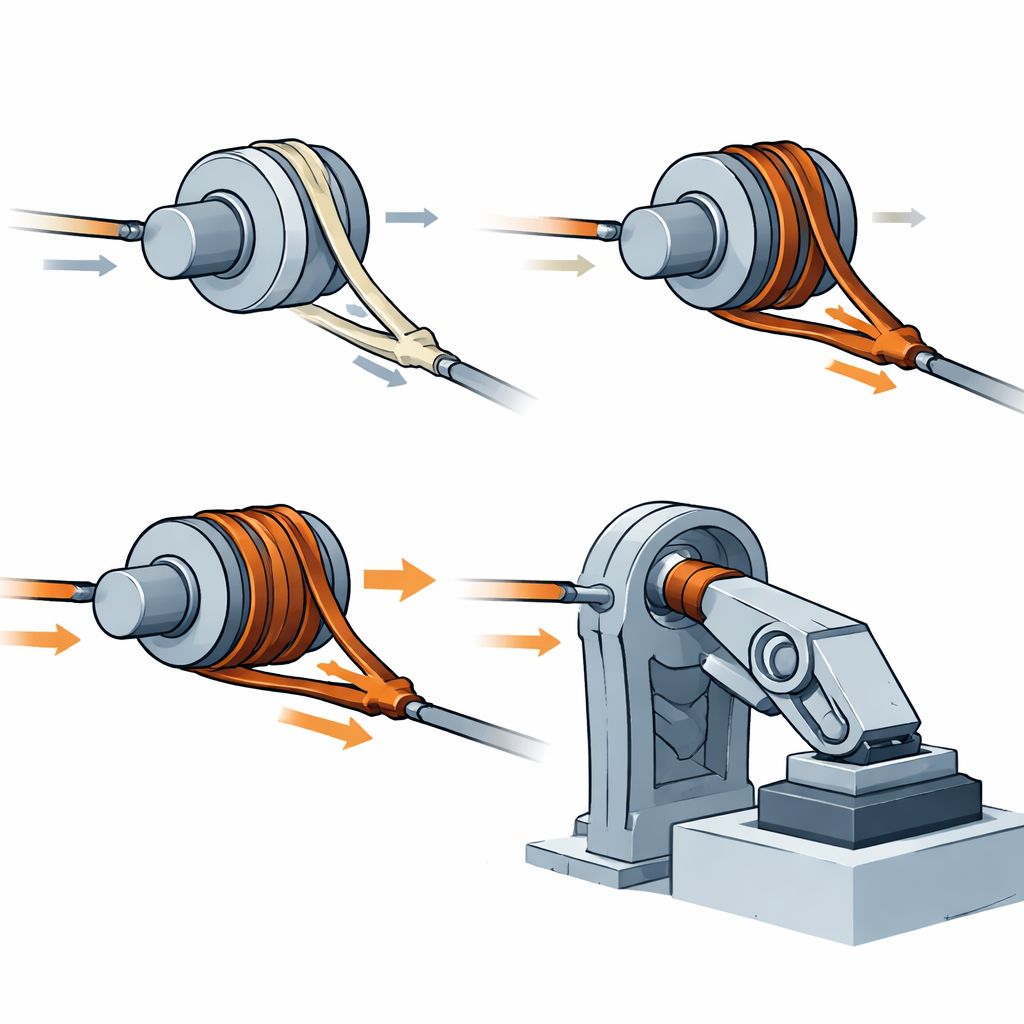
Le cœur de l’approche consiste à exploiter l’« effet capstan », le même principe qui permet à un marin de retenir une charge lourde en enroulant une corde autour d’un taquet. Ici, une bande électroadhésive fine est enroulée autour d’une surface cylindrique. L’équipe a étendu la théorie capstan classique pour inclure la force normale supplémentaire générée par l’attraction électrostatique. Leur modèle montre que la force transmise croît de façon exponentielle avec l’angle d’enroulement, mais seulement dans les régions où la bande glisse sur la surface. Des expériences avec des enroulements d’un ou plusieurs tours ont confirmé ce comportement : à mesure que le nombre de tours augmente, l’embrayage peut retenir des forces dépassant 100 newtons, alors que, sans tension appliquée, la force chute à seulement quelques newtons. Des prises d’images à grande vitesse de la déformation à l’intérieur de la bande enroulée ont révélé comment un front de glissement démarre du côté à haute tension et progresse le long de l’arc à mesure que la charge augmente, fournissant une image physique de la manière dont l’embrayage répartit la charge et où il est le plus efficace.
De faibles impulsions à une préhension douce et humaine
Parce que les embrayages sont commandés électroniquement, leur force peut être modulée dans le temps. Les chercheurs ont mesuré la rapidité d’activation et de désactivation des embrayages sous différentes tensions et schémas de commande, constatant qu’ils peuvent se relâcher en quelques millisecondes et fonctionner efficacement autour de 1 kilohertz. Cette vitesse permet d’utiliser la modulation de largeur d’impulsion : au lieu de laisser l’embrayage entièrement actif, de courtes impulsions marche‑arrêt limitent la tension qui s’accumule dans le tendon, permettant d’ajuster les forces jusqu’à des fractions de newton. Dans ce régime de « glissement » à faible force, les articulations paraissent souples et se laissent facilement déplacer, permettant à la main de se conformer aux objets et d’être rétro‑activée en toute sécurité par un utilisateur. Lorsque l’on commande un engagement continu, le même matériel produit des forces de maintien élevées.
Une démonstration à deux doigts qui change de mode à la demande
Pour valider le concept à l’échelle du système, l’équipe a construit une pince à deux doigts avec trois articulations par doigt. Les six articulations sont entraînées par un seul moteur, et chaque tendon est contrôlé par une paire d’embrayages en configuration de transfert de charge — l’un pour tirer, l’autre pour verrouiller. Avec de courts pulses de tension à faible rapport cyclique, les doigts deviennent doucement conformes : ils compensent les ressorts de rappel, se referment doucement autour d’une mousse souple ou d’un plastique fin, et peuvent être repoussés avec de faibles forces tout en maintenant le contact. Lorsque les embrayages externes de « verrouillage » sont engagés, les tendons s’arriment au sol et la pince peut tenir des charges supérieures au kilogramme, y compris des objets lourds en prises de type crochet ou poing. L’élément crucial est que le maintien nécessite presque aucune puissance moteur, car ce sont les embrayages — et non le moteur — qui supportent la charge.
Ce que cela pourrait signifier pour les futures mains robotiques
Dans l’ensemble, ce travail montre qu’en combinant une géométrie intelligente, l’électroadhésion et un calibrage temporel soigné, il est possible de construire des mains robotiques compactes couvrant trois ordres de grandeur en force — du toucher ultra‑léger à la préhension ferme — tout en restant rétro‑activables et économes en énergie. Plutôt que d’ajouter davantage de moteurs et d’engrenages, les concepteurs peuvent partager un moteur entre de nombreuses articulations et utiliser ces embrayages en film mince pour décider quand chaque doigt doit être souple et coopératif ou verrouillé et puissant. Cela ouvre la voie à des mains robotiques plus légères, plus sûres autour des personnes et mieux à même de manipuler la variété chaotique des objets du monde réel.
Citation: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
Mots-clés: pinces robotiques, embrayages électroadhésifs, actionnement rétro‑activable, effet capstan, manipulation habile