Clear Sky Science · it
Robot potenti ma ancora retroazionabili tramite frizioni elettroadesive amplificate a capstan
Robot che possono stringere con forza ma rimanere delicati
Immaginate una mano robotica in grado di afferrare con delicatezza una pesca matura e poi, pochi istanti dopo, trattenere saldamente un utensile pesante—il tutto restando compatta ed efficiente dal punto di vista energetico. Questo articolo presenta un nuovo modo di costruire mani di questo tipo ripensando il modo in cui i robot trasmettono la forza. I ricercatori combinano geometrie intelligenti e attrito controllato elettricamente per creare meccanismi compatti che sono sia potenti sia facili da retroazionare, molto simili a una mano umana che può cedere con morbidezza ma bloccarsi quando necessario.
Perché le mani robotiche hanno bisogno sia di forza sia di tatto
I robot moderni faticano a eguagliare la combinazione di forza, velocità e sensibilità della mano umana. I motori elettrici tradizionali spesso richiedono ingranaggi voluminosi per produrre coppia sufficiente, il che li rende pesanti, inefficienti e difficili da retroazionare—cioè difficili da muovere spingendoli dall'esterno. Per compiti come la manipolazione di alimenti, l'assistenza alle persone o l'imballaggio di oggetti delicati, questo è un problema: si vuole che la mano ceda in sicurezza al contatto, ma che allo stesso tempo mantenga gli oggetti in modo sicuro una volta posizionati. Soluzioni esistenti come robot morbidi, sistemi pneumatici e meccanismi a rigidità variabile offrono risposte parziali ma tendono a essere deboli, lenti o difficili da scalare a molte articolazioni.
Un nuovo modo di condividere un motore su più dita
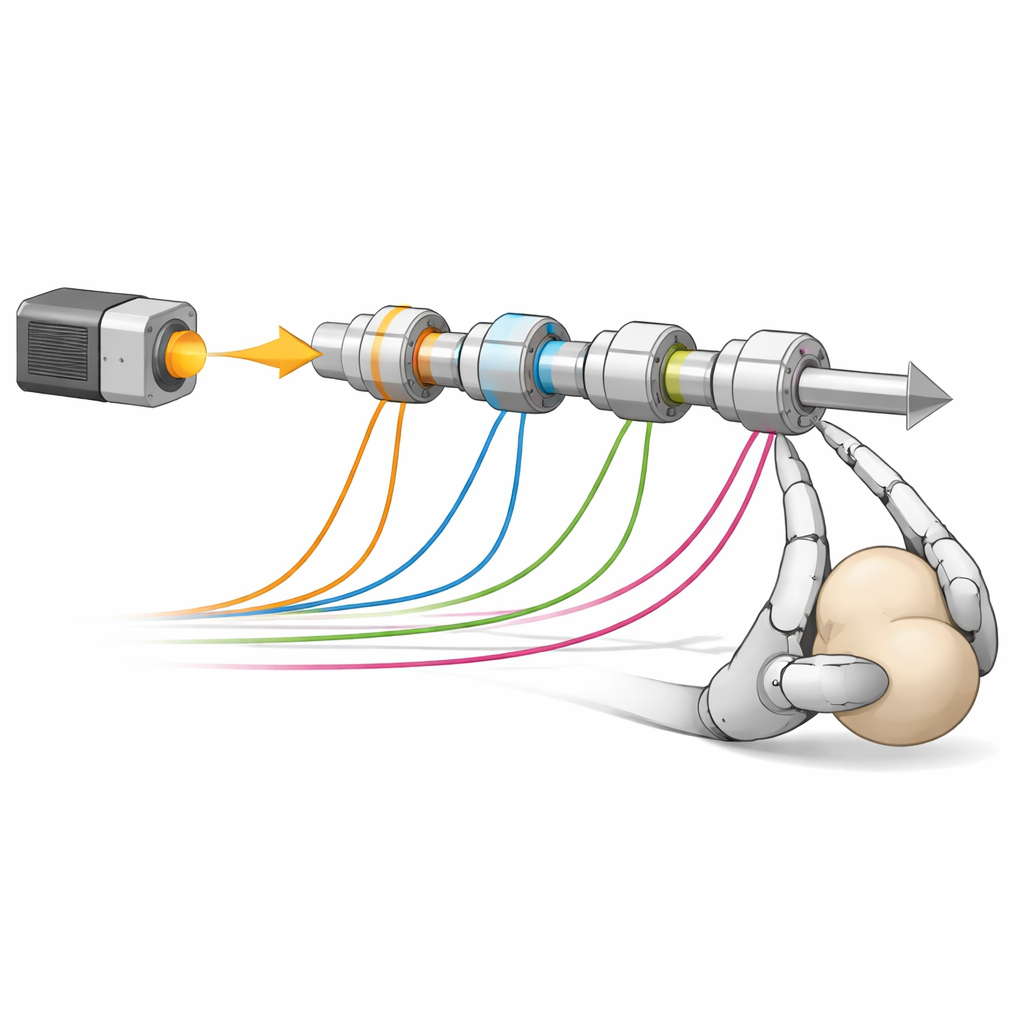
Gli autori propongono un'architettura di "multiplexing elettromeccanico" che consente a un singolo motore di azionare molte articolazioni instradando la potenza attraverso freni speciali chiamati frizioni elettroadesive. Pensate a un albero rotante che attraversa il braccio, con piccole fasce in film sottile avvolte attorno a cilindri lungo la sua lunghezza. Quando la tensione è assente, queste fasce aderiscono appena alla superficie, permettendo al movimento di scorrere liberamente. Quando viene applicata tensione, l'attrazione elettrostatica fa aderire le fasce, così l'attrito lungo l'avvolgimento curvo può trasmettere forze elevate ai tendini collegati. Accoppiando le frizioni—una per tirare un tendine dall'albero, l'altra per fissare quel tendine a massa—il sistema può commutare ciascuna dito tra una fase morbida e retroazionabile di movimento e una fase di bloccaggio ferma ed efficiente dal punto di vista energetico senza tenere il motore sotto sforzo.
Usare superfici curve per amplificare forze piccole
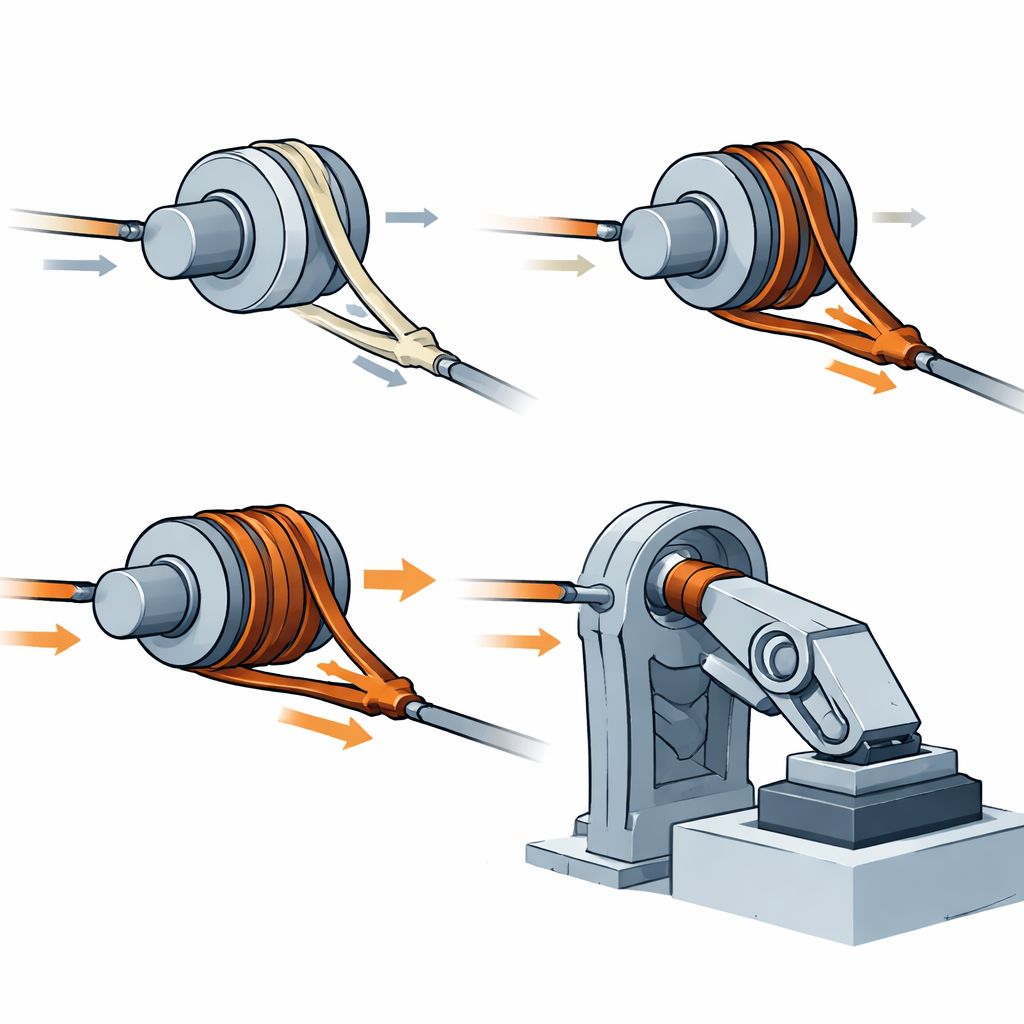
Il cuore dell'approccio è sfruttare l"effetto capstan", lo stesso principio che permette a un marinaio di tenere un carico pesante avvolgendo una cima attorno a un palo. Qui una sottile striscia elettroadesiva è avvolta attorno a una superficie cilindrica. Il team ha esteso la teoria classica del capstan per includere la forza normale aggiuntiva generata dall'attrazione elettrostatica. Il loro modello mostra che la forza trasmessa cresce esponenzialmente con l'angolo di avvolgimento, ma solo nelle regioni dove la striscia scivola sulla superficie. Esperimenti con avvolgimenti a singolo e multiplo giro hanno confermato questo comportamento: all'aumentare del numero di giri, la frizione può sostenere forze superiori a 100 newton, mentre quando la tensione è spenta la forza scende a pochi newton. Immagini ad alta velocità della deformazione all'interno della striscia avvolta hanno rivelato come un fronte di scorrimento inizi dal lato ad alta tensione e progredisca lungo l'arco all'aumentare del carico, fornendo un quadro fisico di come la frizione distribuisca il carico e dove sia più efficace.
Da impulsi minuscoli a prese fluide e amichevoli per l'uomo
Poiché le frizioni sono controllate elettronicamente, la loro forza può essere modellata nel tempo. I ricercatori hanno misurato la rapidità con cui le frizioni si attivano e disattivano a diverse tensioni e schemi di pilotaggio, trovando che possono rilasciarsi in pochi millisecondi e operare efficacemente vicino a 1 kilohertz. Questa velocità rende possibile usare la modulazione di larghezza d'impulso: invece di lasciare la frizione completamente on, brevi impulsi on–off limitano quanto sforzo si accumula nel tendine, permettendo di regolare le forze fino a frazioni di newton. In questo regime di basso sforzo di "scorrimento", le articolazioni risultano compliant e sono facilmente spinte, consentendo alla mano di conformarsi agli oggetti ed essere retroazionata in sicurezza da un utente. Quando è richiesta l'impegnativa continua, lo stesso hardware produce alte forze di tenuta.
Una dimostrazione a due dita che cambia modalità su richiesta
Per dimostrare il concetto a livello di sistema, il team ha costruito una pinza a due dita con tre articolazioni per dito. Tutte e sei le articolazioni condividono un unico motore, e ogni tendine è controllato da una coppia di frizioni nella configurazione di trasferimento del carico—una per tirare, una per bloccare. Con impulsi di tensione a basso duty cycle, le dita diventano soffici e compliant: compensano le molle di ritorno, si chiudono delicatamente attorno a schiuma morbida o plastica sottile e possono essere spinte indietro con forze ridotte mantenendo il contatto. Quando le frizioni esterne di "ingaggio" sono attivate, i tendini si bloccano a massa e la pinza può sostenere carichi superiori a un chilogrammo, inclusi oggetti pesanti in prese ad uncino o a pugno. Fondamentalmente, la tenuta richiede quasi nessuna potenza del motore, perché sono le frizioni—non il motore—a portare il carico.
Cosa potrebbe significare per le mani robotiche del futuro
Nel complesso, il lavoro dimostra che combinando geometria intelligente, elettroadesione e tempistiche accurate, è possibile costruire mani robotiche compatte che coprono tre ordini di grandezza nella forza—from il tocco piuma alla presa ferma—restando al contempo retroazionabili ed efficienti dal punto di vista energetico. Invece di aggiungere più motori e ingranaggi, i progettisti possono condividere un motore su molte articolazioni e usare queste frizioni in film sottile per decidere quando ciascuna dito deve essere morbido e cooperativo o bloccato e robusto. Ciò indica mani robotiche future più leggere, più sicure intorno alle persone e migliori nel gestire la variegata e disordinata realtà degli oggetti del mondo reale.
Citazione: Aksoy, B., Shilati, A., Forbes, B. et al. Strong yet backdrivable robots through capstan-amplified electroadhesive clutches. npj Robot 4, 23 (2026). https://doi.org/10.1038/s44182-026-00084-1
Parole chiave: pinze robotiche, frizioni elettroadesive, attuazione retroazionabile, effetto capstan, manipolazione dextra