Clear Sky Science · zh
使用双机器人可调磁性端执行器进行磁场控制
用看不见的“手”引导微小医疗机器人
想象把一个米粒大小的机器人在血管中操纵,精确输送药物到所需位置,或轻柔弯折一根如发丝般细的探针以检查体内结构。本文提出了一种实现这些目标的新方法:用精心塑形的磁场替代直接接触。研究人员构建了一个紧凑的机器人工具,能够高效地开关磁性并朝不同方向指向磁场,从而为在人体内部进行更安全、更精确的医疗操作打开了可能性。 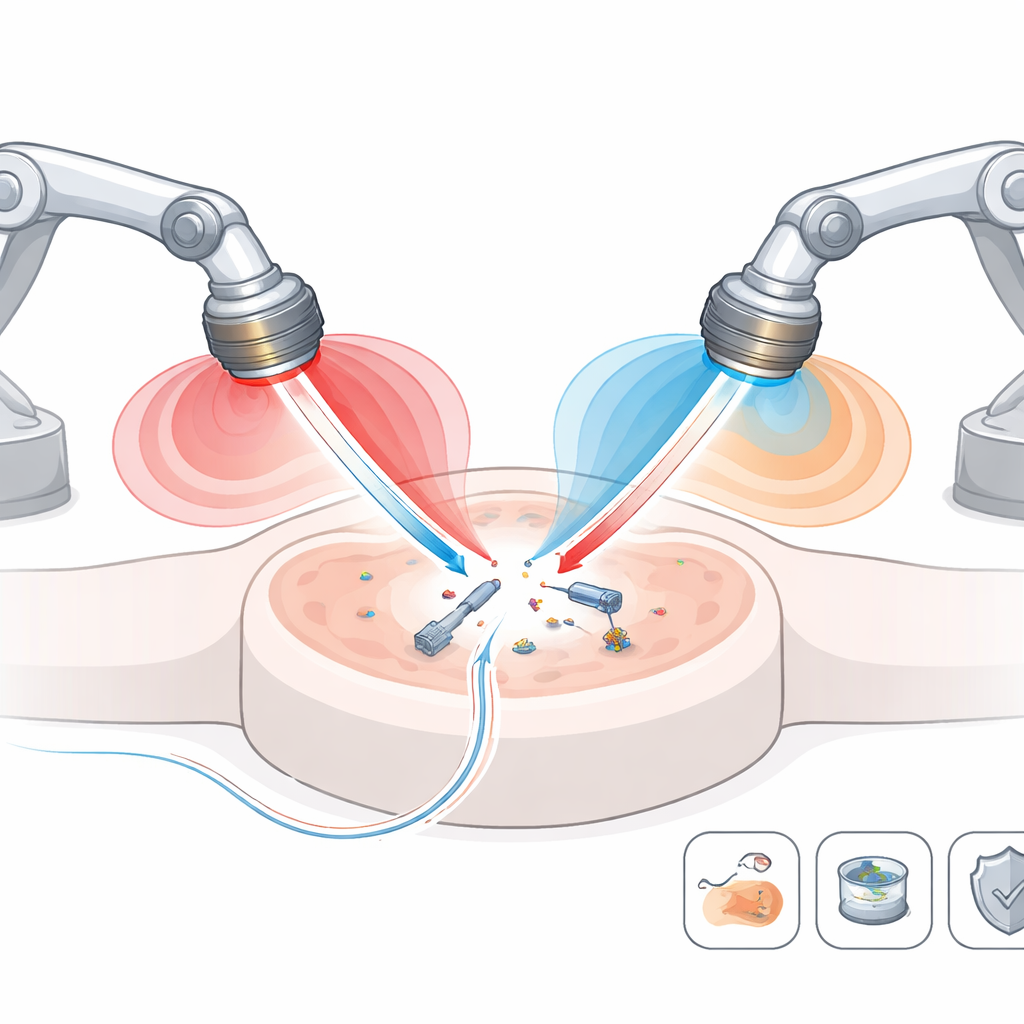
一种新型磁性工具
目前医学中的磁控系统常依赖笨重的线圈或固定在病人周围的大型永磁体。这些装置虽然能产生强磁场,但难以移动,也不总是适合到达体内狭窄深处。团队提出了一种不同的方法:可调磁性端执行器(tunable magnetic end effector,简称 TME),安装在标准机器人臂的末端。在其紧凑外壳内布置了若干永磁体,通过旋转内部部件,使这些磁场要么叠加产生强拉力(ON 状态),要么在很大程度上相互抵消(OFF 状态)。这样,机器人就能改变磁场的强度和方向,而无需在病人周围不断摆动大型磁体。
塑造磁场的“甜点区”
为了理解并控制该工具的能力,研究人员对 TME 在三维空间中产生的磁场进行了详尽测量。他们改变工具的位置、整体角度和内部电机的旋转角度,利用传感器绘制出场强和方向如何变化的地图。他们展示了一组设置主要改变场强,而另一组设置主要旋转场的方向,就像转动指南针针而不改变其吸引力。在几厘米尺度的立方体空间内,TME 能平滑地将磁场从几乎零调节到约 12 毫特斯拉,并产生尖锐的梯度——即在小距离内场强的显著变化——这对推动和拉动微小器件至关重要。
两个工具胜过一个
尽管单个 TME 可以在某一区域控制磁性物体,但真正的威力在于同时使用两个工具。将两台 TME 安装在独立的机器人臂上,并调整它们的朝向和位置,团队可以在同一工作空间内创建不同的磁性“区域”。在一个区域内,场可能朝某一方向;在相邻区域内,场可能朝另一方向或几乎相互抵消。这使得例如可以用一个工具吸引微小载体,然后通过将第一个静悄悄切换到 OFF 状态将控制权交给第二个工具。组合系统甚至能创造出场几乎消失的特殊点,这对某些成像和跟踪技术很有用。 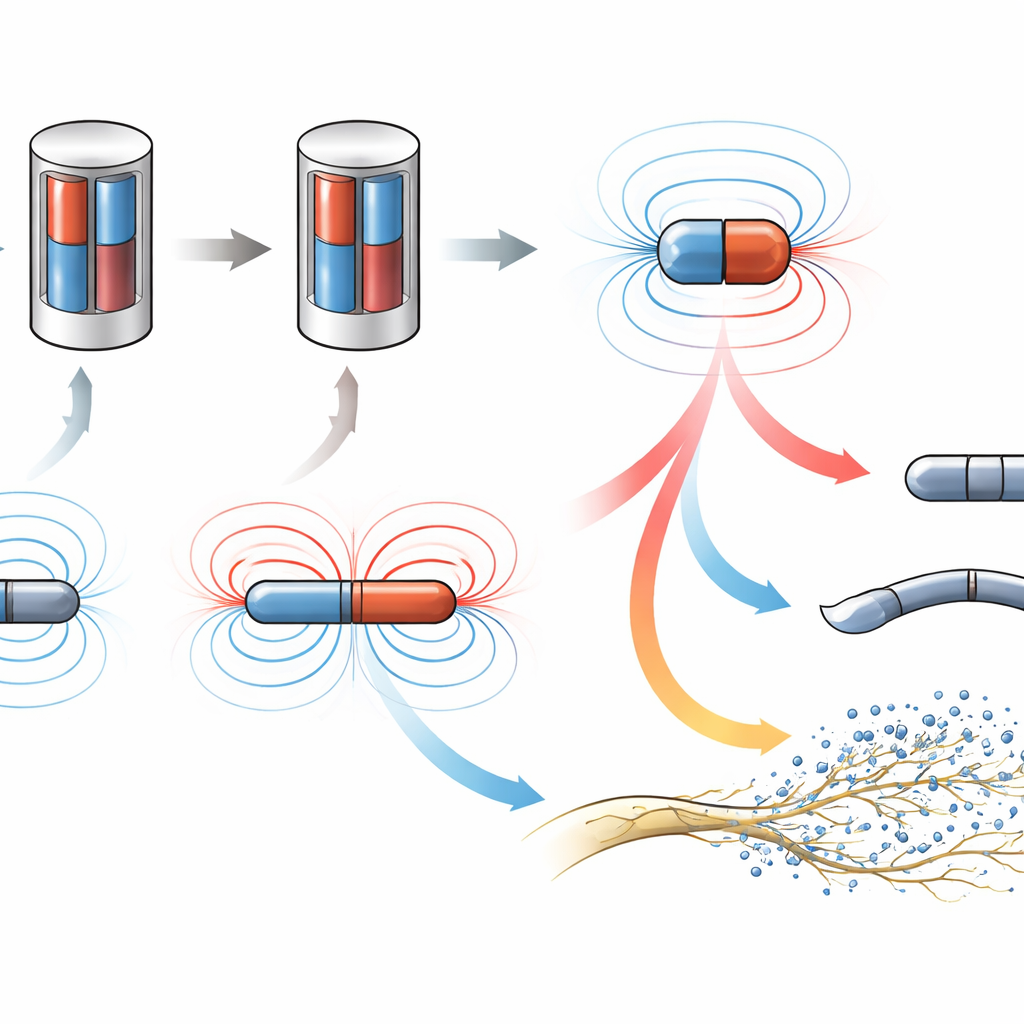
教机器人瞄准磁场
由于工具设置与生成的磁场之间的关系复杂,研究人员训练了一个人工神经网络来辅助控制。他们收集了大量数据集——12 万种不同的位置和角度组合——用以教会网络如何预测在特定点产生期望场强和方向所需的设置。训练完成后,该数据驱动模型可以反向工作:用户指定想要的磁场,网络则建议机器人臂和内部电机应如何移动。测试表明,网络的预测接近实际,场强和方向的误差仅为几百分比。
与微型机器人与群体的演示
为了证明系统不只是能绘制漂亮的场图,团队在三类微小代理上进行了测试。首先,他们引导了一个毫米级的磁性“载体”沿分岔路径移动,通过调节场强改变其速度,并在路口通过两台 TME 的切换来重新定向。其次,他们利用磁场弯曲柔软的磁响应细丝,这些细丝类似柔性的医疗探针,探索磁体路径和 ON/OFF 时序如何影响最终形状。最后,他们在流道内引导磁性纳米颗粒群体,借助细微的场变化来选择群体将行进的分支,同时保持其平均速度几乎不变。在每种情况中,神经网络都帮助计算出实现期望运动所需的场设置。
这对未来医学意味着什么
简而言之,这项工作展示了如何构建一个用于无法直接接触的微小装置的紧凑磁性“遥控器”。通过将可调的永磁体与智能软件相结合,该系统在无需大型线圈或笨重、持续运动的磁体的情况下,提供了精确且可重构的磁场。尽管实验在实验室环境中完成,相同原理可用于引导用于靶向药物递送、微创手术或体内高级成像的微型机器人。随着进一步开发和实时感测,这类双机器人磁性工具或许有一天能让医生到达并治疗当前难以或无法安全进入的区域。
引用: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
关键词: 磁性微型机器人, 微创手术, 机器人末端执行器, 纳米颗粒群体, 磁场控制