Clear Sky Science · it
Controllo del campo magnetico con estremità magnetiche regolabili robotiche doppie
Guidare micro‑robot medici con mani invisibili
Immaginate di pilotare un robot delle dimensioni di un granello attraverso i vasi sanguigni per consegnare un farmaco esattamente dove serve, o di flettere delicatamente una sonda sottilissima per ispezionare l’interno del corpo. Questo articolo presenta un nuovo modo per farlo, usando campi magnetici modellati con cura invece del contatto diretto. I ricercatori hanno costruito uno strumento robotico compatto in grado di accendere e spegnere efficacemente il magnetismo e di orientarlo in direzioni diverse, aprendo la porta a procedure mediche più sicure e precise all’interno del corpo umano. 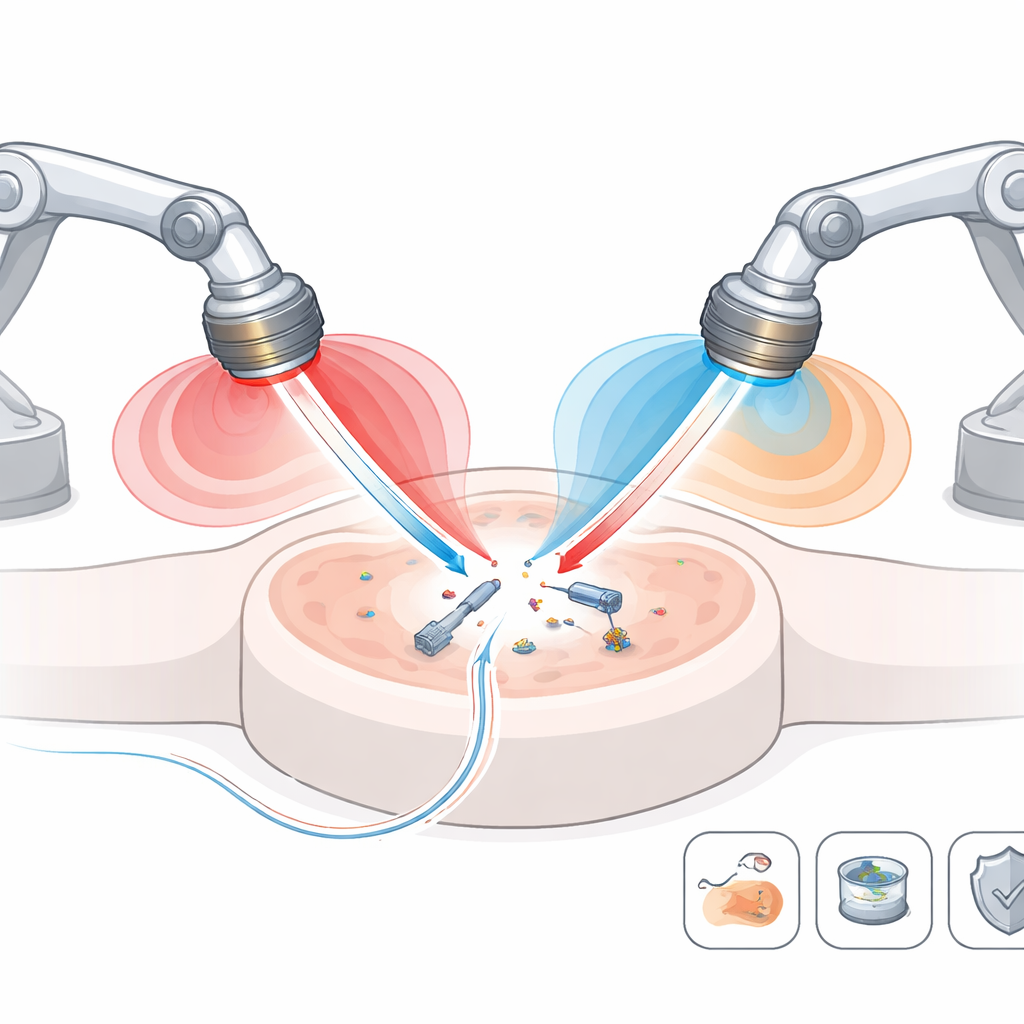
Un nuovo tipo di strumento magnetico
I sistemi attuali per il controllo magnetico in medicina si basano spesso su bobine ingombranti o grandi magneti permanenti fissati intorno al paziente. Questi possono essere potenti ma difficili da muovere e non sono sempre ideali per raggiungere punti stretti in profondità nel corpo. Il team propone un approccio diverso: un “effettore terminale magnetico regolabile”, o TME, che si monta sulla punta di un braccio robotico standard. All’interno del suo alloggiamento compatto ci sono diversi magneti permanenti disposti in modo che, ruotando parti interne, i loro campi possano sommarsi per produrre una forte attrazione (stato ON) oppure annullarsi in gran parte (stato OFF). Questo permette al robot di modificare l’intensità e la direzione del campo magnetico senza dover continuamente spostare un grande magnete attorno al paziente.
Plasmare il punto dolce magnetico
Per capire e controllare cosa può fare questo strumento, i ricercatori hanno eseguito misure dettagliate del campo magnetico creato dal TME nello spazio tridimensionale. Hanno variato la sua posizione, l’angolo dell’intero strumento e la rotazione di un motore interno, quindi hanno usato sensori per mappare come cambiassero intensità e direzione del campo. Hanno dimostrato che un insieme di regolazioni cambia principalmente la forza del campo, mentre un altro agisce soprattutto ruotandone la direzione, come girare l’ago di una bussola senza modificare la forza dell’attrazione. All’interno di un cubo di spazio di qualche centimetro di lato, il TME può modulare con continuità campi da quasi zero fino a circa 12 millitesla e creare gradienti netti—variazioni nell’intensità del campo su piccole distanze—essenziali per spingere e tirare dispositivi microscopici.
Due strumenti valgono più di uno
Mentre un singolo TME può controllare oggetti magnetici in una regione, il vero potenziale emerge dall’uso di due TME insieme. Posizionando due TME su bracci robotici separati e regolando la loro orientazione e posizione, il team può creare diverse «zone» magnetiche nello stesso spazio di lavoro. In un’area il campo può puntare in una direzione; nelle vicinanze può puntare in un’altra o quasi annullarsi del tutto. Questo rende possibile, per esempio, attrarre un piccolo portatore con uno strumento e poi trasferire il controllo al secondo mettendo silenziosamente il primo in stato OFF. Il sistema combinato può persino creare un punto in cui il campo è quasi nullo, utile per alcune tecniche di imaging e tracciamento. 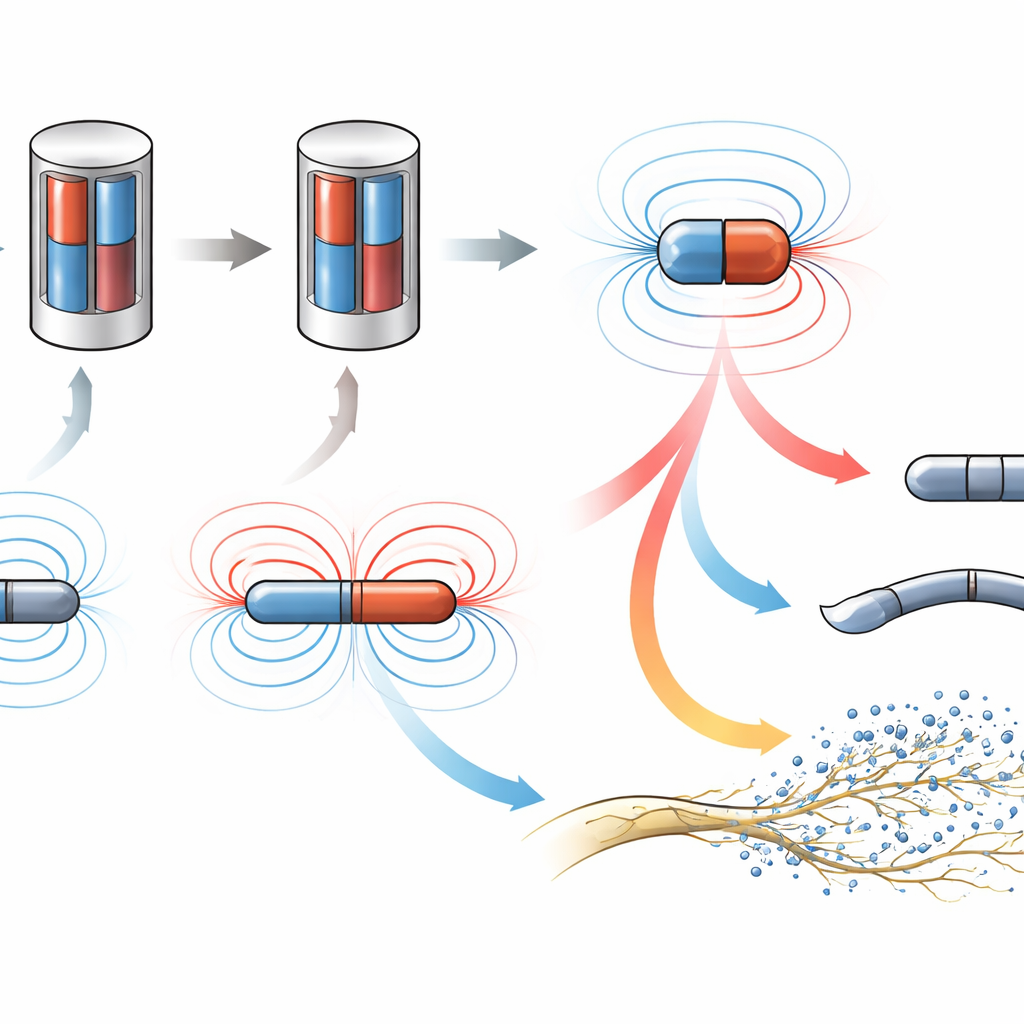
Insegnare al robot a puntare il campo
Poiché la relazione tra le impostazioni dello strumento e il campo magnetico risultante è complessa, i ricercatori hanno addestrato una rete neurale artificiale per aiutare. Hanno raccolto un ampio set di dati—120.000 diverse combinazioni di posizioni e angoli—e lo hanno usato per insegnare alla rete come prevedere quali impostazioni produrranno una determinata intensità e direzione del campo in un punto specifico. Una volta addestrato, questo modello basato sui dati può funzionare in modo inverso: l’utente specifica il campo magnetico desiderato e la rete suggerisce come muovere i bracci robotici e i motori interni. I test hanno mostrato che le previsioni della rete erano vicine alla realtà, con errori di solo qualche percento nell’intensità e nell’orientamento del campo.
Dimostrazioni con micro‑robot e sciami
Per dimostrare che il sistema può fare più che tracciare mappe di campo, il team lo ha testato su tre tipi di agenti in miniatura. Primo, hanno guidato un «portatore» magnetico di scala millimetrica lungo percorsi ramificati, regolando l’intensità del campo per modificarne la velocità e commutando tra i due TME per deviarlo alle biforcazioni. Secondo, hanno usato i campi per flettere filamenti morbidi e magneticamente sensibili che ricordano sonde mediche flessibili, esplorando come il percorso del magnete e il timing ON/OFF influenzino la forma finale. Infine, hanno guidato sciami di nanoparticelle magnetiche attraverso canali fluidi, usando cambiamenti sottili del campo per selezionare quale diramazione lo sciame avrebbe seguito mantenendo quasi costante la velocità media. In ogni caso, la rete neurale ha aiutato a calcolare le impostazioni di campo necessarie per ottenere il movimento desiderato.
Cosa significa per la medicina del futuro
In termini chiari, questo lavoro mostra come costruire un «telecomando» magnetico compatto per dispositivi troppo piccoli per essere toccati direttamente. Combinando magneti permanenti regolabili con software intelligente, il sistema fornisce campi magnetici precisi e riorganizzabili senza grandi bobine o magneti pesanti in continuo movimento. Sebbene gli esperimenti siano stati condotti in allestimenti di laboratorio, gli stessi principi potrebbero essere impiegati per guidare micro‑robot per la somministrazione mirata di farmaci, la chirurgia minimamente invasiva o l’imaging avanzato all’interno del corpo. Con ulteriori sviluppi e sensori in tempo reale, tali strumenti magnetici robotici doppi potrebbero un giorno permettere ai medici di raggiungere e trattare aree attualmente difficili o impossibili da accessare in sicurezza.
Citazione: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
Parole chiave: microrobot magnetici, chirurgia minimamente invasiva, effettore terminale robotico, sciami di nanoparticelle, controllo del campo magnetico