Clear Sky Science · nl
Magnetische veldregeling met dubbele robotische instelbare magnetische eindeffectors
Het geleiden van piepkleine medische robots met onzichtbare handen
Stel je voor dat je een korrelgroot robotje door bloedvaten bestuurt om medicijnen precies daar af te leveren waar ze nodig zijn, of dat je een haardun probe voorzichtig buigt om het inwendige van het lichaam te inspecteren. Dit artikel presenteert een nieuwe manier om dat te doen, met zorgvuldig gevormde magnetische velden in plaats van direct contact. De onderzoekers hebben een compact robotisch instrument gebouwd dat magnetisme effectief aan en uit kan zetten en in verschillende richtingen kan richten, wat de deur opent naar veiligere en nauwkeurigere medische procedures in het menselijk lichaam. 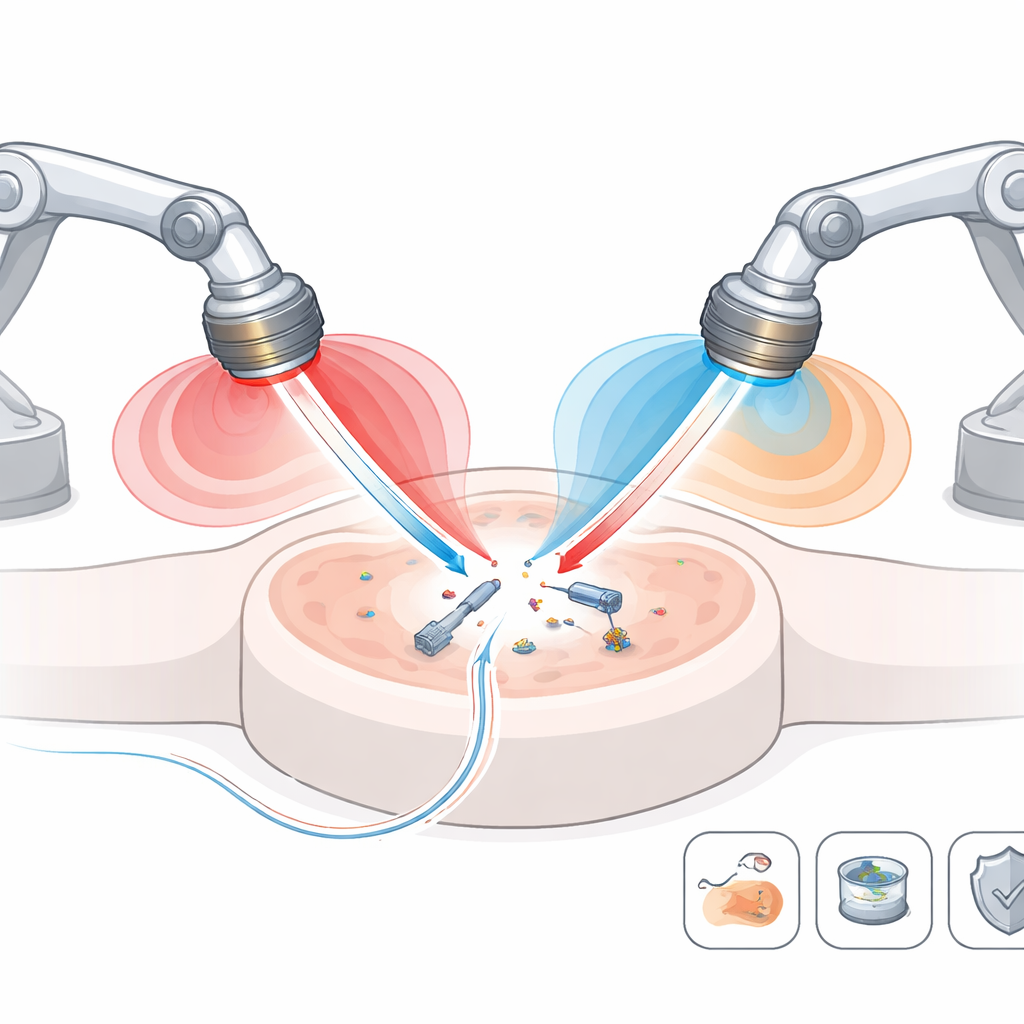
Een nieuw soort magnetisch gereedschap
De huidige systemen voor magnetische controle in de geneeskunde vertrouwen vaak op omvangrijke spoelen of grote permanente magneten rond de patiënt. Deze kunnen krachtig zijn maar lastig te verplaatsen, en ze zijn niet altijd ideaal om krappe plekken diep in het lichaam te bereiken. Het team introduceert een andere benadering: een "tunable magnetic end effector" (TME) die op de punt van een standaard robotarm wordt gemonteerd. In de compacte behuizing zitten meerdere permanente magneten zo gerangschikt dat door interne onderdelen te roteren hun velden elkaar óf versterken voor een sterke aantrekkingskracht (de AAN‑stand), óf elkaar grotendeels opheffen (de UIT‑stand). Dit stelt de robot in staat om de sterkte en richting van het magnetische veld te veranderen zonder constant een grote magneet rond de patiënt te zwaaien.
Het vormen van de magnetische sweet spot
Om te begrijpen en te beheersen wat dit instrument kan doen, voerden de onderzoekers gedetailleerde metingen uit van het magnetische veld dat de TME in drie dimensies creëert. Ze varieerden de positie, de hoek van het hele gereedschap en de rotatie van een interne motor, en gebruikten vervolgens sensoren om in kaart te brengen hoe veldsterkte en richting veranderden. Ze lieten zien dat de ene set instellingen vooral de veldsterkte verandert, terwijl een andere set vooral de richting roteert, als het draaien van een kompasnaald zonder de treksterkte te veranderen. Binnen een kubus van enkele centimeters breed kan de TME velden soepel instellen van bijna nul tot ongeveer 12 millitesla en scherpe gradiënten creëren — veranderingen in veldsterkte over kleine afstanden — die essentieel zijn voor het duwen en trekken van piepkleine apparaten.
Twee gereedschappen zijn beter dan één
Hoewel een enkele TME magnetische objecten in één gebied kan beheersen, zit de echte kracht in het gebruik van twee TMEs samen. Door twee TMEs op afzonderlijke robotarmen te plaatsen en hun oriëntatie en positie aan te passen, kan het team verschillende magnetische "zones" in hetzelfde werkgebied creëren. In het ene gebied kan het veld in één richting wijzen; vlak daarbij kan het in een andere richting wijzen of bijna volledig wegvallen. Dit maakt het mogelijk bijvoorbeeld een klein carrier‑deeltje met het ene instrument aan te trekken en de controle vervolgens over te dragen aan de tweede door de eerste stilletjes naar zijn UIT‑stand te schakelen. Het gecombineerde systeem kan zelfs een speciaal punt creëren waar het veld bijna verdwijnt, wat nuttig is voor sommige beeldvormings‑ en volgtechnieken. 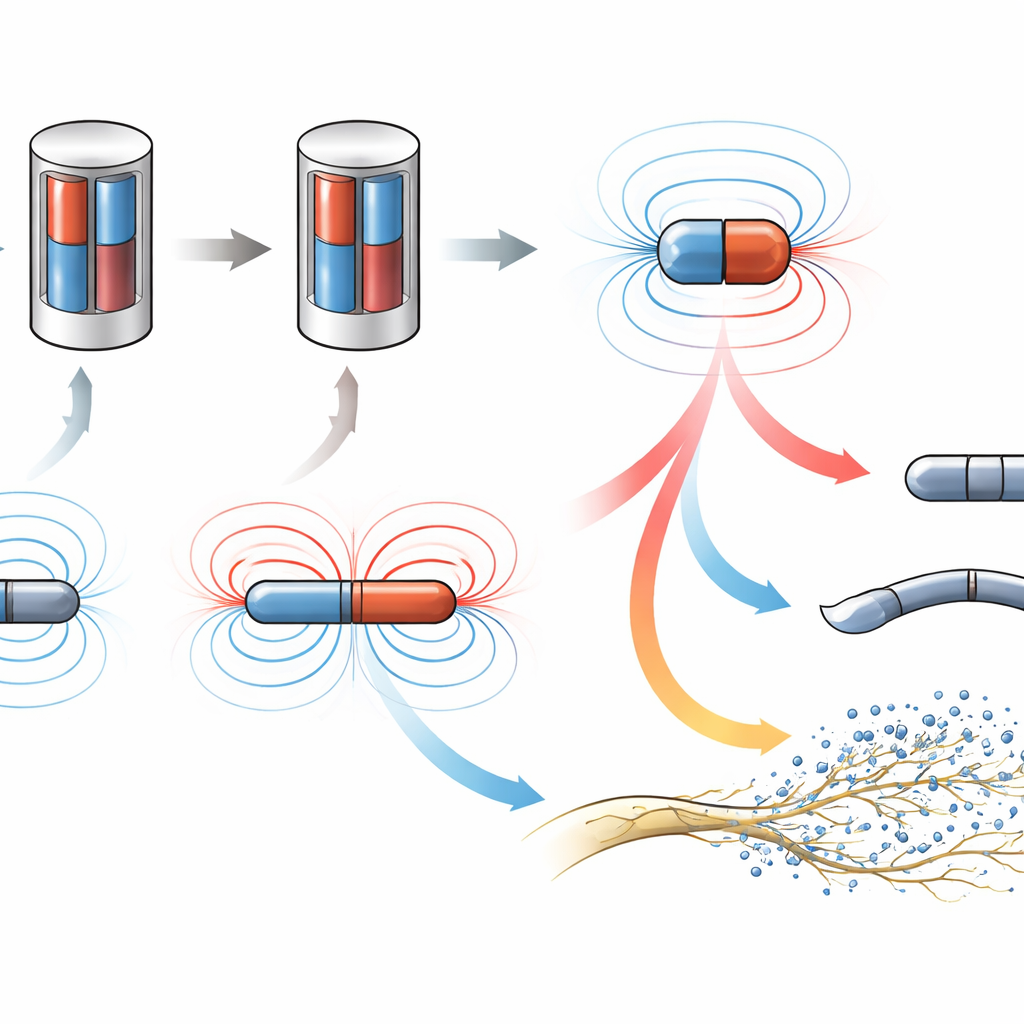
De robot leren het veld te richten
Omdat de relatie tussen de instellingen van het instrument en het resulterende magnetische veld complex is, trainden de onderzoekers een kunstmatig neuraal netwerk om te helpen. Ze verzamelden een grote dataset—120.000 verschillende combinaties van posities en hoeken—en gebruikten die om het netwerk te leren voorspellen welke instellingen een gewenste veldsterkte en richting op een bepaalde plek zullen produceren. Eenmaal getraind kan dit datagedreven model in omgekeerde richting werken: een gebruiker specificeert het gewenste magnetische veld, en het netwerk suggereert hoe de robotarmen en interne motoren moeten bewegen. Tests toonden aan dat de voorspellingen van het netwerk dicht bij de werkelijkheid lagen, met slechts enkele procenten fout in veldsterkte en oriëntatie.
Demonstraties met piepkleine robots en zwermen
Om te bewijzen dat het systeem meer kan dan alleen mooie veldkaarten tekenen, testte het team het op drie soorten miniatuuragenten. Ten eerste stuurden ze een millimeter‑schaal magnetische "carrier" langs vertakkende paden, waarbij ze de veldsterkte aanpasten om de snelheid te veranderen en tussen de twee TMEs schakelden om hem bij kruisingen van richting te laten veranderen. Ten tweede gebruikten ze de velden om zachte, magnetisch reagerende filamenten te buigen die lijken op flexibele medische probes, en onderzochten hoe het pad van de magneet en de AAN/UIT‑timing de uiteindelijke vorm beïnvloeden. Ten slotte loodsten ze zwermen magnetische nanodeeltjes door vloeistofkanalen, waarbij subtiele veldwijzigingen bepaalden welke tak de zwerm zou volgen terwijl de gemiddelde snelheid vrijwel constant bleef. In elk geval hielp het neurale netwerk bij het berekenen van de veldinstellingen die nodig waren om de gewenste beweging te bereiken.
Wat dit betekent voor de geneeskunde van de toekomst
In eenvoudige woorden laat dit werk zien hoe je een compact magnetisch "afstandsbediening" kunt bouwen voor apparaten die te klein zijn om direct aan te raken. Door afstelbare permanente magneten te combineren met slimme software levert het systeem nauwkeurige, herconfigureerbare magnetische velden zonder grote spoelen of zware, constant bewegende magneten. Hoewel de experimenten in laboratoriumopstellingen zijn uitgevoerd, kunnen dezelfde principes worden toegepast om piepkleine robots te geleiden voor gerichte medicijnafgifte, minimaal invasieve chirurgie of geavanceerde beeldvorming in het lichaam. Met verdere ontwikkeling en realtime sensoring zouden zulke dubbele robotische magnetische gereedschappen artsen op termijn kunnen laten bereiken en behandelen wat nu moeilijk of onveilig toegankelijk is.
Bronvermelding: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
Trefwoorden: magnetische microrobots, minimaal invasieve chirurgie, robotische eindeffector, nanodeeltjes zwermen, magnetische veldregeling