Clear Sky Science · pl
Kontrola pola magnetycznego za pomocą podwójnych robotycznych, dostrajanych końcówek magnetycznych
Sterowanie mikroskopijnymi robotami medycznymi niewidzialnymi rękami
Wyobraź sobie kierowanie robocikiem wielkości ziarenka przez naczynia krwionośne, by dostarczyć lek dokładnie tam, gdzie jest potrzebny, albo delikatne zginanie włosowatego sondy w celu zbadania wnętrza ciała. Artykuł przedstawia nowy sposób osiągnięcia tego za pomocą starannie ukształtowanych pól magnetycznych zamiast bezpośredniego kontaktu. Badacze zbudowali kompaktowe narzędzie robotyczne, które potrafi skutecznie włączać i wyłączać magnetyzm oraz kierować nim w różnych kierunkach, otwierając drogę do bezpieczniejszych i bardziej precyzyjnych zabiegów medycznych wewnątrz ludzkiego ciała. 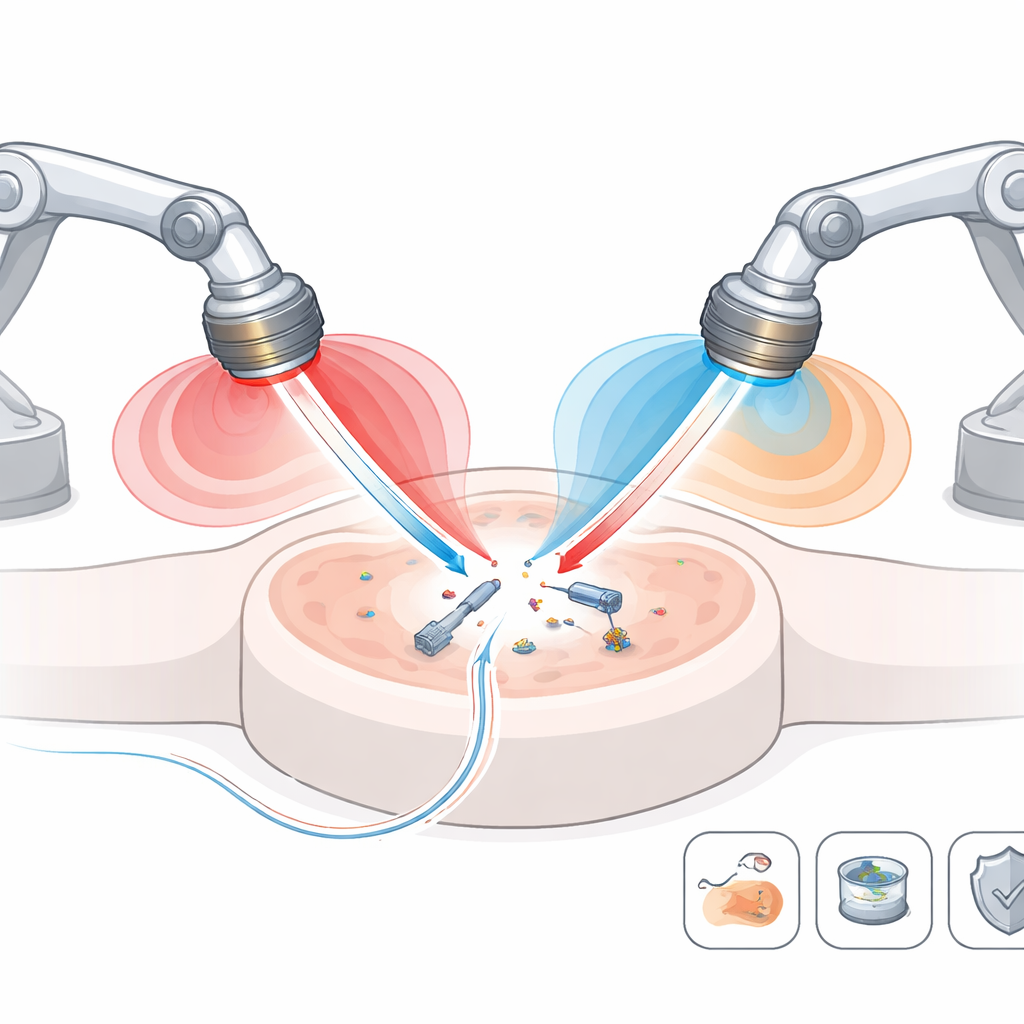
Nowy rodzaj magnetycznego narzędzia
Obecne systemy kontroli magnetycznej w medycynie często opierają się na masywnych cewkach lub dużych magnesach trwałych umieszczonych wokół pacjenta. Mogą być one potężne, lecz trudne do przemieszczania i nie zawsze nadają się do sięgania w wąskie, głęboko położone miejsca. Zespół proponuje inne podejście: „dostrajana magnetyczna końcówka” (TME), montowana na końcu standardowego ramienia robotycznego. W jej kompaktowej obudowie znajdują się kilka magnesów trwałych tak ułożonych, że poprzez obrót wewnętrznych elementów ich pola mogą albo się sumować, generując silne przyciąganie (stan WŁ.), albo w dużej mierze się znosić (stan WYŁ.). Pozwala to robotowi zmieniać siłę i kierunek pola magnetycznego bez konieczności ciągłego przemieszczania dużego magnesu wokół pacjenta.
Kształtowanie magnetycznego „słodkiego punktu”
Aby zrozumieć i kontrolować możliwości tego narzędzia, badacze wykonali szczegółowe pomiary pola magnetycznego generowanego przez TME w trójwymiarowej przestrzeni. Zmieniali jego pozycję, kąt ustawienia całego narzędzia oraz obrót wewnętrznego silnika, a następnie użyli czujników do zmapowania zmian siły i kierunku pola. Pokazali, że jeden zestaw ustawień głównie zmienia natężenie pola, podczas gdy inny głównie obraca jego kierunek — jak obracanie igły kompasu bez zmiany siły przyciągania. W obrębie sześcianu o boku kilku centymetrów TME może płynnie dostrajać pola od niemal zera do około 12 miliTesla oraz tworzyć ostre gradienty — zmiany siły pola na małych odległościach — niezbędne do popychania i przyciągania maleńkich urządzeń.
Dwa narzędzia są lepsze niż jedno
Pojedyncza TME może kontrolować obiekty magnetyczne w jednym obszarze, ale prawdziwa przewaga pojawia się przy użyciu dwóch jednocześnie. Montując dwie TME na oddzielnych ramionach robotycznych i regulując ich orientację oraz pozycję, zespół potrafi tworzyć różne magnetyczne „strefy” w tej samej przestrzeni roboczej. W jednym obszarze pole może wskazywać w jedną stronę; w sąsiednim — w inną lub niemal się znosić. Pozwala to na przykład przyciągnąć maleńki nośnik jednym narzędziem, a potem przekazać kontrolę drugiemu przez ciche przełączenie pierwszego do stanu WYŁ. Połączony system może nawet stworzyć punkt, w którym pole niemal zanika, co jest użyteczne dla niektórych technik obrazowania i śledzenia. 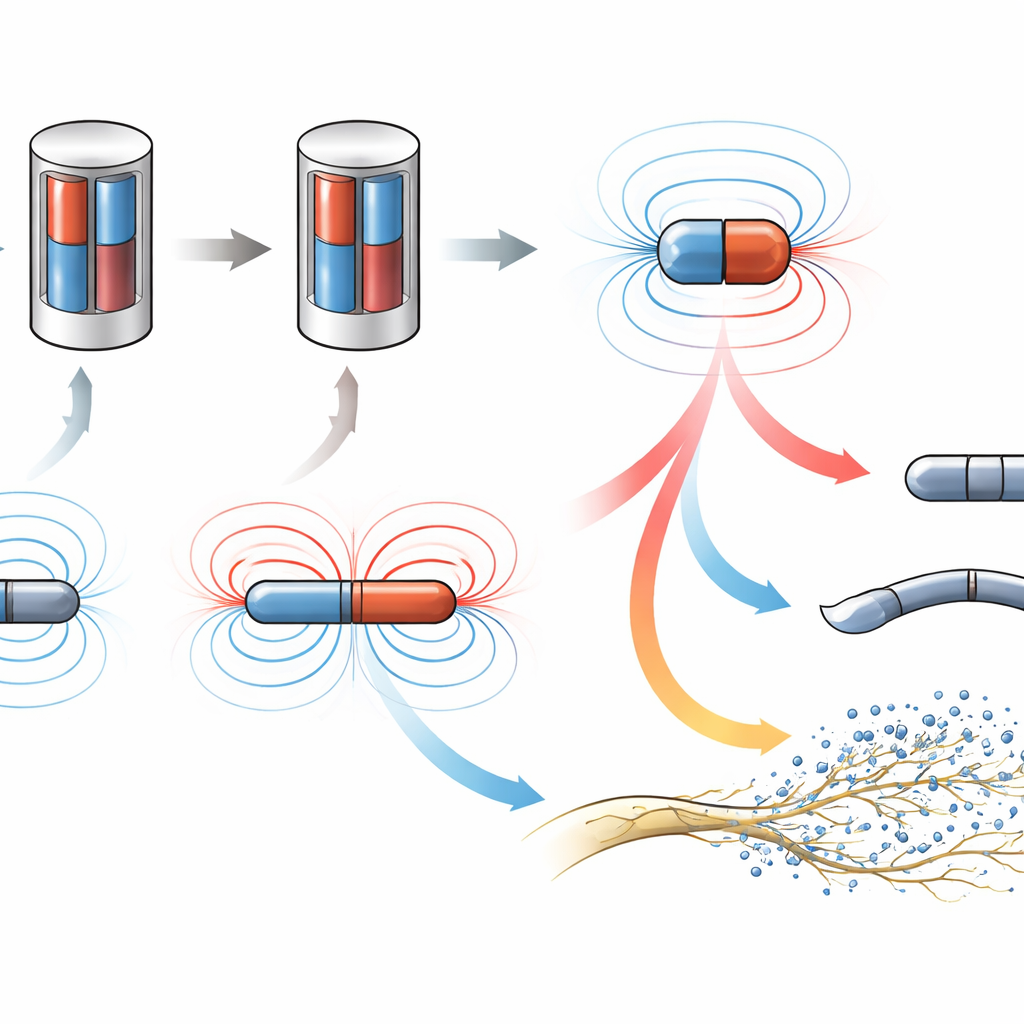
Nauczanie robota, jak celować polem
Ponieważ zależność między ustawieniami narzędzia a powstającym polem magnetycznym jest złożona, badacze wykorzystali sztuczną sieć neuronową jako pomoc. Zebrali duży zestaw danych — 120 000 różnych kombinacji pozycji i kątów — i użyli go, aby nauczyć sieć przewidywania, które ustawienia wygenerują pożądaną siłę i kierunek pola w danym punkcie. Po przeszkoleniu model oparty na danych może działać odwrotnie: użytkownik określa wymagane pole magnetyczne, a sieć sugeruje, jak powinny poruszać się ramiona robota i wewnętrzne silniki. Testy wykazały, że przewidywania sieci były bliskie rzeczywistości, z błędem w siłę i orientację pola rzędu kilku procent.
Demonstracje z malutkimi robotami i rojami
Aby udowodnić, że system potrafi coś więcej niż tylko rysować mapy pól, zespół przetestował go na trzech rodzajach miniaturowych agentów. Po pierwsze, kierowali milimetrowej skali magnetycznym „nośnikiem” wzdłuż rozgałęziających się ścieżek, regulując siłę pola, by zmieniać jego prędkość i przełączając się między dwoma TME, by przekierować go na rozgałęzieniach. Po drugie, użyli pól do zaginania miękkich, magnetycznie reagujących włókien przypominających elastyczne sondy medyczne, badając, jak trasa magnesu i sekwencja WŁ./WYŁ. wpływają na ostateczny kształt. Wreszcie prowadzili roje nanocząstek magnetycznych przez kanały płynowe, używając subtelnych zmian pola, by wybrać, którą odnogą podąży rój, przy jednoczesnym utrzymaniu prawie stałej średniej prędkości. W każdym przypadku sieć neuronowa pomagała obliczać ustawienia pola potrzebne do osiągnięcia pożądanego ruchu.
Co to oznacza dla przyszłej medycyny
Mówiąc prosto, praca ta pokazuje, jak zbudować kompaktowy magnetyczny „pilot zdalnego sterowania” dla urządzeń zbyt małych, by dotykać je bezpośrednio. Łącząc dostrajane magnesy trwałe ze sprytnym oprogramowaniem, system dostarcza precyzyjnych, rekonfigurowalnych pól magnetycznych bez dużych cewek czy ciężkich, ciągle poruszanych magnesów. Choć eksperymenty przeprowadzono w warunkach laboratoryjnych, te same zasady można zastosować do prowadzenia maleńkich robotów w celowanym dostarczaniu leków, chirurgii minimalnie inwazyjnej lub zaawansowanego obrazowania wewnątrz ciała. Przy dalszym rozwoju i sprzężeniu z pomiarami w czasie rzeczywistym takie podwójne robotyczne narzędzia magnetyczne mogą pewnego dnia pozwolić lekarzom dotrzeć i leczyć obszary, które obecnie są trudno lub niemożliwe do bezpiecznego osiągnięcia.
Cytowanie: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
Słowa kluczowe: magnetyczne mikroroboty, chirurgia minimalnie inwazyjna, robotyczna końcówka robocza, stada nanocząstek, kontrola pola magnetycznego