Clear Sky Science · ar
التحكم بالمجال المغناطيسي بواسطة مؤثرات نهائية روبوتية قابلة للضبط ثنائية
توجيه روبوتات طبية مجهرية بأيدي غير مرئية
تخيل توجيه روبوت بحجم حبة رمل عبر الأوعية الدموية ليُوصِل الدواء بدقة إلى المكان المطلوب، أو ثني مسبار رفيع كخيط شعر لفحص داخل الجسم برفق. تعرض هذه الورقة طريقة جديدة للقيام بذلك باستخدام حقول مغناطيسية مُشكَّلة بعناية بدلاً من التلامس المباشر. بنى الباحثون أداة روبوتية مدمجة تستطيع تشغيل المغناطيسية وإيقافها بفعالية وتوجيهها في اتجاهات مختلفة، مما يفتح الطريق لإجراءات طبية داخل الجسم أكثر أماناً ودقة. 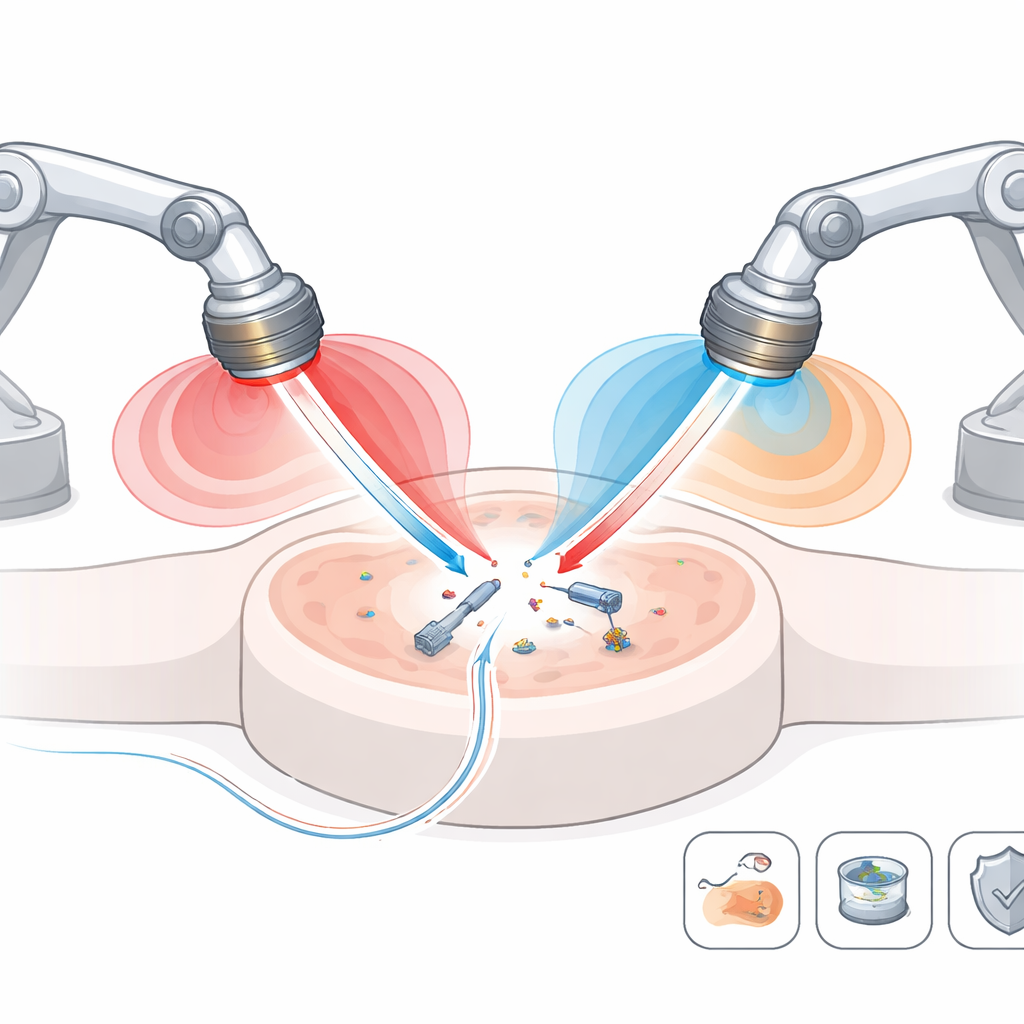
أداة مغناطيسية من نوع جديد
تعتمد أنظمة التحكم المغناطيسي المستخدمة حالياً في الطب غالباً على ملفات ضخمة أو مغناطيسات دائمة كبيرة مثبتة حول المريض. قد تكون هذه قوية لكنها صعبة الحركة، وليست دائماً مثالية للوصول إلى أماكن ضيقة داخل الجسم. يقدم الفريق نهجاً مختلفاً: «مؤثر نهائي مغناطيسي قابل للضبط» أو TME يثبّت في طرف ذراع روبوتية قياسية. داخل غلافه المدمج توجد عدة مغناطيسات دائمة مرتبة بحيث أنه عبر تدوير أجزاء داخلية تتضافر مجالاتها لإنتاج جذب قوي (حالة التشغيل) أو تتعادل إلى حد كبير فتخفف المجال (حالة الإيقاف). هذا يسمح للروبوت بتغيير شدة واتجاه المجال المغناطيسي دون الحاجة لتحريك مغناطيس كبير باستمرار حول المريض.
تشكيل المنطقة المغناطيسية المناسبة
لفهم والتحكم فيما يستطيع هذا الجهاز فعله، أجرى الباحثون قياسات تفصيلية للمجال المغناطيسي الذي تولده TME في الفضاء ثلاثي الأبعاد. غيّروا موضعه وزاوية الأداة بأكملها ودوارن محرك داخلي، ثم استعملوا مستشعرات لرسم خريطة كيف تغيرت شدة واتجاه المجال. أظهروا أن مجموعة إعدادات واحدة تغير أساساً شدة المجال، بينما مجموعة أخرى تدور اتجاهه في الأساس، كتحريك مؤشر بوصلة دون تغيير قوة الجذب. ضمن مكعب من الفضاء بعرض عدة سنتيمترات، يمكن لـTME ضبط المجالات بسلاسة من قريب من الصفر وحتى نحو 12 ميليتسلا وخلق تدرجات حادة — تغييرات في شدة المجال عبر مسافات صغيرة — وهي أساسية لدفع وسحب الأجهزة الصغيرة.
أداتان خير من واحدة
بينما يمكن لـTME واحدة التحكم بأجسام مغناطيسية في منطقة واحدة، تأتي القوة الحقيقية من استخدام اثنتين معاً. بوضع اثنين من TMEs على ذراعين روبوتيتين منفصلتين وضبط اتجاهاتهما ومواقعهما، يستطيع الفريق خلق «مناطق» مغناطيسية مختلفة داخل نفس مساحة العمل. في منطقة قد يشير المجال باتجاه معين؛ وبالقرب منه قد يشير باتجاه آخر أو يكاد يلغى تماماً. هذا يجعل من الممكن، على سبيل المثال، جذب ناقل صغير بواسطة أداة واحدة، ثم نقل السيطرة للأخرى عن طريق تحويل الأولى بهدوء إلى حالة الإيقاف. يمكن للنظام المجمّع حتى خلق نقطة خاصة يكاد فيها المجال يختفي، وهو مفيد لبعض تقنيات التصوير والتتبع. 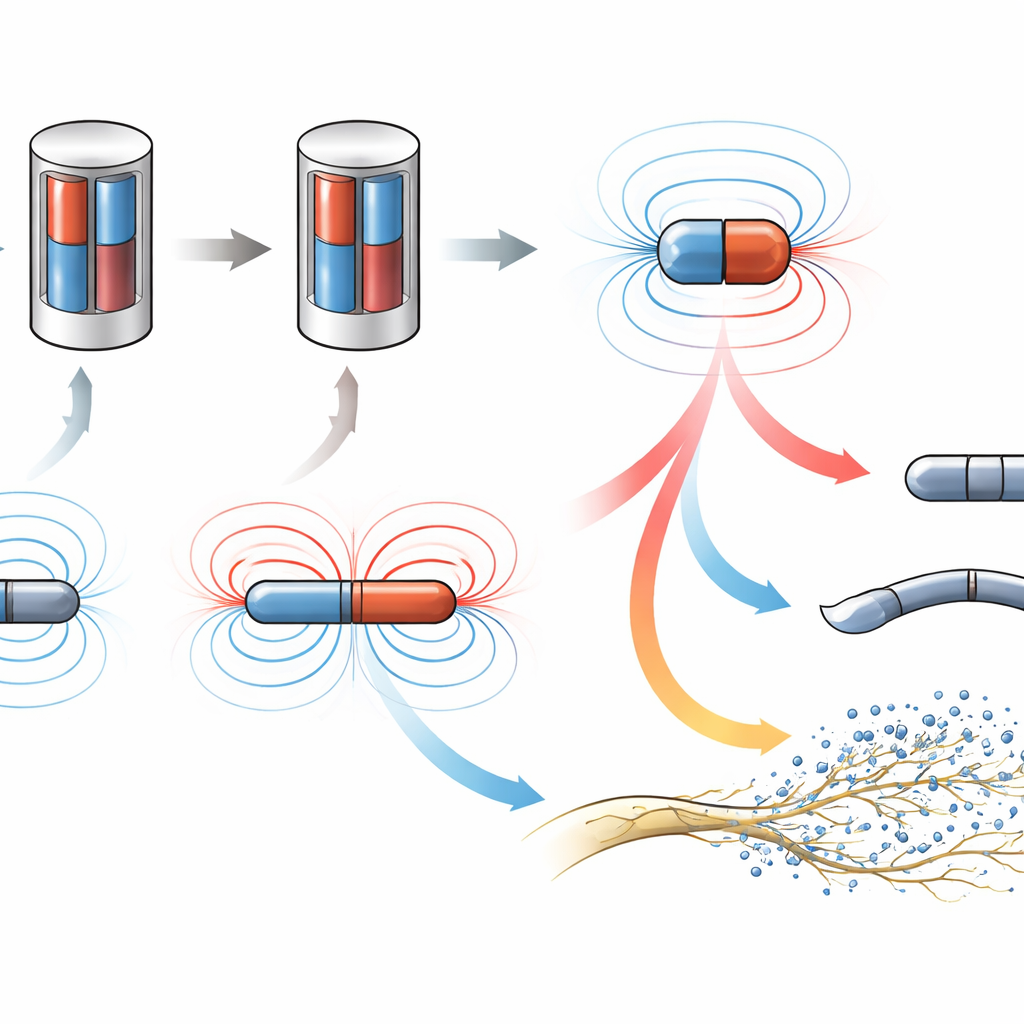
تعليم الروبوت كيفية توجيه المجال
نظراً لتعقيد العلاقة بين إعدادات الأداة والمجال المغناطيسي الناتج، درّب الباحثون شبكة عصبية اصطناعية للمساعدة. جمعوا مجموعة بيانات كبيرة — 120,000 تركيبة مختلفة من المواضع والزوايا — واستخدموها لتعريف الشبكة كيف تتنبأ بالإعدادات التي ستنتج شدة واتجاه مجال مرغوب في بقعة معينة. بعد التدريب، يستطيع هذا النموذج المعتمد على البيانات العمل بالعكس: يحدد المستخدم المجال المغناطيسي المطلوب، وتقترح الشبكة كيف يجب أن تتحرك أذرع الروبوت والمحركات الداخلية. أظهرت الاختبارات أن توقعات الشبكة كانت قريبة من الواقع، بخطأ في شدة واتجاه المجال لا يتجاوز بضعة بالمئات.
تجارب مع روبوتات مجهرية وسربات
لإثبات أن النظام يمكنه أكثر من رسم خرائط للمجالات، اختبره الفريق على ثلاثة أنواع من العوامل المصغرة. أولاً، وجهوا ناقلاً مغناطيسياً بحجم مليمتر عبر ممرات متفرعة، مضبطين شدة المجال لتغيير سرعته ومبدّلين بين TMEs لتغييره عند التقاطعات. ثانياً، استعملوا الحقول لثني خيوط لينة مستجيبة مغناطيسياً تشبه المجسات الطبية المرنة، مستكشفين كيف يغيّر مسار المغناطيس وتوقيته بين التشغيل والإيقاف الشكل النهائي. أخيراً، وجهوا سربات من الجسيمات النانوية المغناطيسية عبر قنوات سائلة، مستخدمين تغييرات دقيقة في المجال لاختيار الفرع الذي ستتبعه السرب مع الحفاظ على سرعته المتوسطة دون تغيير كبير. في كل حالة، ساعدت الشبكة العصبية في حساب إعدادات المجال اللازمة لتحقيق الحركة المطلوبة.
ما يعنيه هذا لمستقبل الطب
بعبارات بسيطة، يوضح هذا العمل كيفية بناء «جهاز تحكم عن بُعد» مغناطيسي مدمج لأجهزة صغيرة جداً لا يمكن لمسها مباشرة. من خلال الجمع بين مغناطيسات دائمة قابلة للضبط وبرمجيات ذكية، يقدم النظام حقولاً مغناطيسية دقيقة وقابلة لإعادة التكوين دون ملفات كبيرة أو مغناطيسات ثقيلة تتحرك باستمرار. رغم أن التجارب أُجريت في بيئات مختبرية، يمكن تطبيق نفس المبادئ لتوجيه روبوتات صغيرة لتوصيل أدوية بشكل مستهدف أو إجراء جراحات طفيفة التوغل أو تحسين التصوير داخل الجسم. مع مزيد من التطوير والحسّاسات في الزمن الحقيقي، قد تسمح مثل هذه الأدوات المغناطيسية الروبوتية الثنائية للأطباء ذات يوم بالوصول إلى مناطق يصعب أو يستحيل الوصول إليها بأمان حالياً.
الاستشهاد: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
الكلمات المفتاحية: الروبوتات المغناطيسية الدقيقة, الجراحة طفيفة التوغل, مؤثر نهائي روبوتي, سربات الجسيمات النانوية, التحكم بالمجال المغناطيسي