Clear Sky Science · tr
Çift robotik ayarlanabilir manyetik uç efektörlerle manyetik alan kontrolü
Görünmez ellerle küçük tıbbi robotları yönlendirmek
Bir kum tanesi büyüklüğündeki bir robotu, ilacı tam gerektiği noktaya iletmek için kan damarları içinde yönlendirdiğinizi veya vücut içini incelemek üzere saç kılı kadar ince bir probu nazikçe büktüğünüzü hayal edin. Bu makale tam da bunu, doğrudan temas yerine dikkatle şekillendirilmiş manyetik alanlar kullanarak yapmanın yeni bir yolunu sunuyor. Araştırmacılar manyetizmayı etkili biçimde açıp kapatabilen ve farklı yönlere nişan alabilen kompakt bir robotik alet geliştirdi; bu da insan vücudu içindeki işlemler için daha güvenli ve daha hassas olanaklar açıyor. 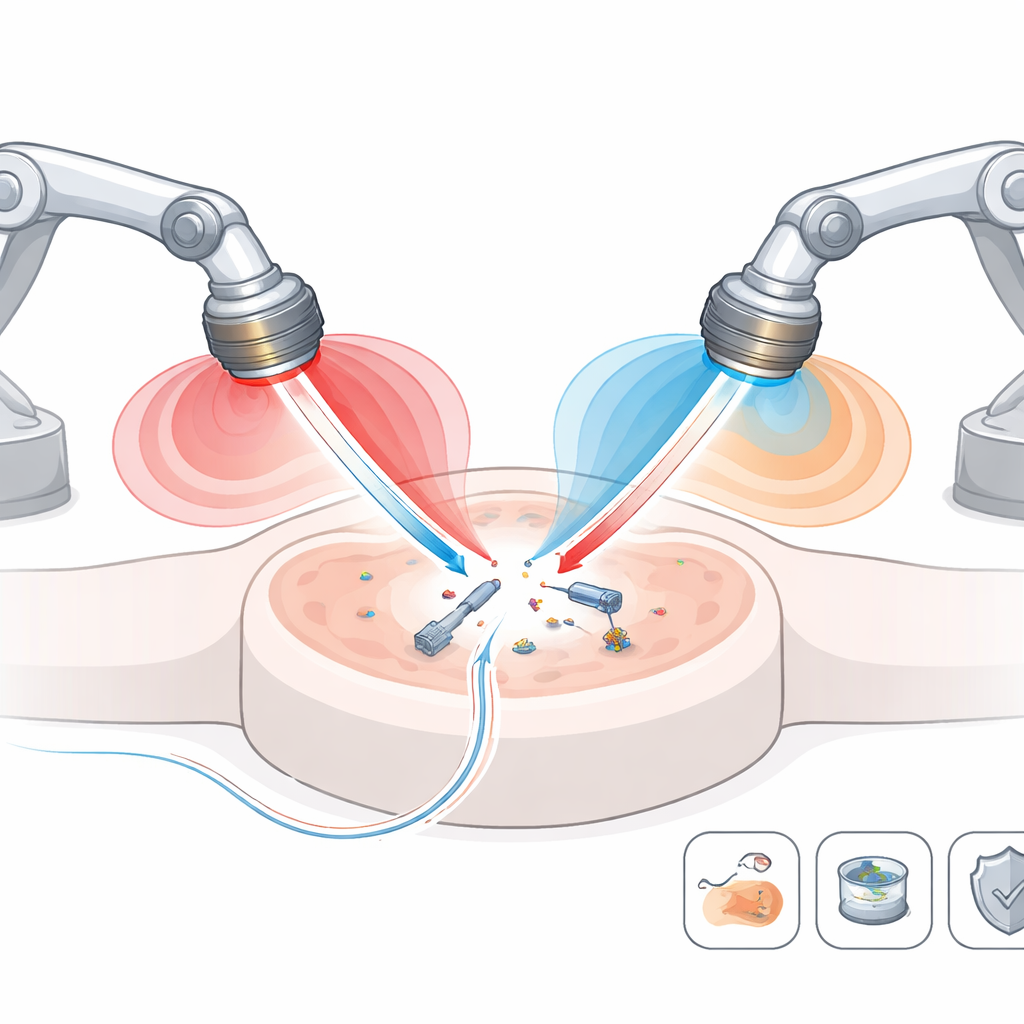
Yeni bir tür manyetik araç
Günümüzde tıpta manyetik kontrol sistemleri sıklıkla hastanın etrafına yerleştirilmiş hantal bobinlere veya büyük sabit mıknatıslara dayanıyor. Bunlar güçlü olabilir ama hareket ettirmesi zor ve vücudun derin, dar noktalarına ulaşmak için her zaman ideal değil. Ekip farklı bir yaklaşım sunuyor: standart bir robot kolun ucuna monte edilen “ayarlanabilir manyetik uç efektör” (TME). Kompakt gövdesinin içinde, iç parçaların döndürülmesiyle alanları ya bir araya gelerek güçlü bir çekim üretecek şekilde (AÇIK durum) ya da büyük ölçüde birbirini iptal edecek şekilde (KAPALI durum) davranan birkaç kalıcı mıknatıs yerleştirilmiş. Bu, robotun hastanın etrafında sürekli büyük bir mıknatısı sallamadan manyetik alanın gücünü ve yönünü değiştirmesine olanak tanıyor.
Manyetik 'tatlı nokta'yı şekillendirmek
Bu aracın neler yapabildiğini anlamak ve kontrol etmek için araştırmacılar TME’nin üç boyutlu uzayda oluşturduğu manyetik alanın ayrıntılı ölçümlerini yaptı. Konumunu, tüm aletin açısını ve iç motorun dönüşünü değiştirdiler, sonra sensörlerle alanın şiddeti ve yönünün nasıl değiştiğini haritaladılar. Bir ayar kümesinin esas olarak alanın ne kadar güçlü olduğunu değiştirdiğini, diğerinin ise çoğunlukla yönünü döndürdüğünü gösterdiler; tıpkı manyetik pusula iğnesini çekiş gücünü değiştirmeden döndürmek gibi. Birkaç santimetre genişliğindeki bir küp içinde TME, alanları neredeyse sıfırdan yaklaşık 12 millitesla'ya kadar düzgünce ayarlayabilir ve küçük mesafeler boyunca alan şiddetindeki keskin gradyanlar—küçük cihazları itmek ve çekmek için gerekli değişimler—oluşturabilir.
İki araç birden daha iyi
Tek bir TME bir bölgede manyetik nesneleri kontrol edebilse de, gerçek güç iki tanesini birlikte kullanmaktan geliyor. İki TME’yi ayrı robot kollarına yerleştirip yüzleşme açılarını ve konumlarını ayarlayarak ekip aynı çalışma alanında farklı manyetik “bölgeler” oluşturabiliyor. Bir bölgede alan bir yöne, yakında başka bir yöne işaret edebilir veya neredeyse tamamen iptal edilebilir. Bu, örneğin küçük bir taşıyıcıyı bir aletle çekip sonra ilkini sessizce KAPALI duruma geçirerek kontrolü ikinciye devretmeyi mümkün kılıyor. Birleştirilmiş sistem ayrıca alanın neredeyse yok olduğu özel bir nokta bile oluşturabiliyor; bu nokta bazı görüntüleme ve izleme teknikleri için faydalı olabilir. 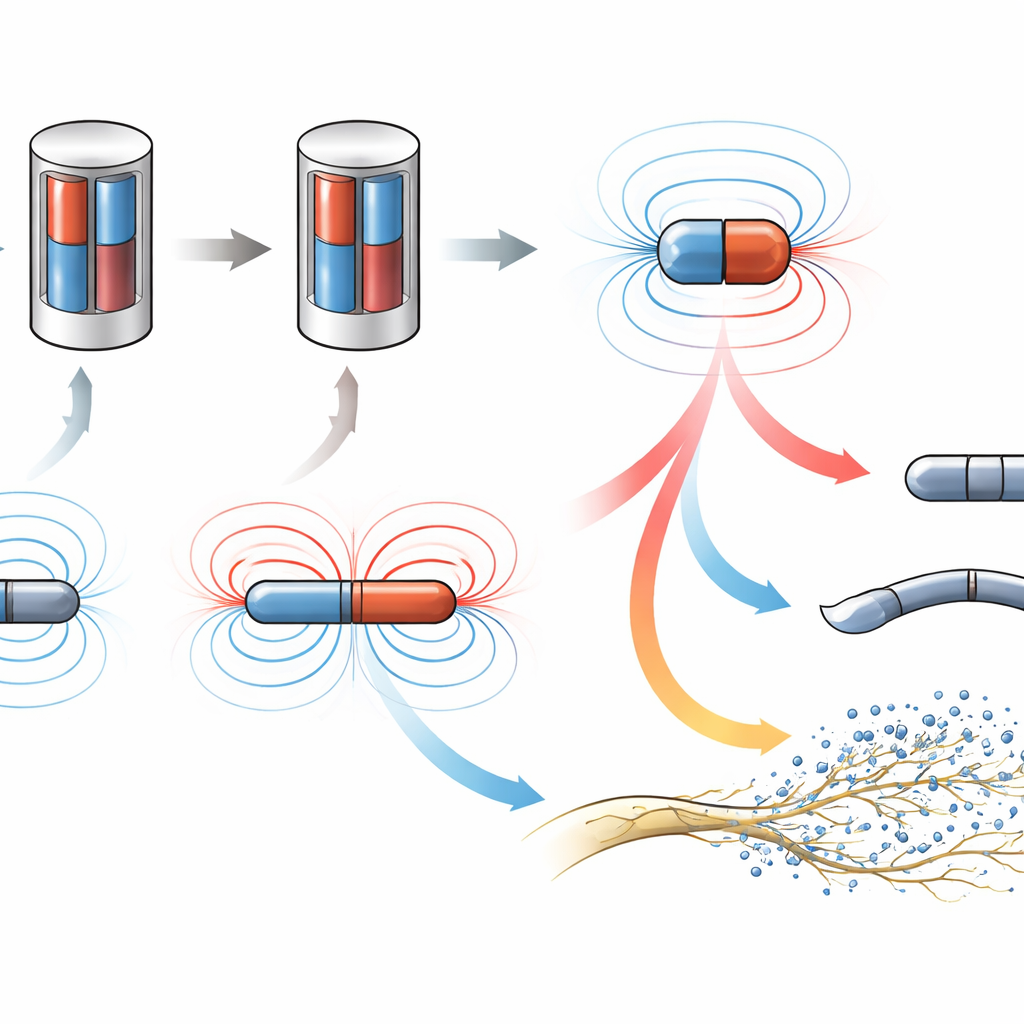
Robotu alanı hedeflemeyi öğretmek
Aletin ayarları ile ortaya çıkan manyetik alan arasındaki ilişki karmaşık olduğundan, araştırmacılar yardımcı olması için bir yapay sinir ağı eğitti. Konumlar ve açıların 120.000 farklı kombinasyonunu içeren büyük bir veri seti topladılar ve ağı, belirli bir noktadaki istenen alan şiddetini ve yönünü üretmek için hangi ayarların seçileceğini tahmin edecek şekilde eğittiler. Eğitildikten sonra bu veri odaklı model tersine çalışabiliyor: kullanıcı istediği manyetik alanı belirtir ve ağ robot kollarının ve iç motorların nasıl hareket etmesi gerektiğini önerir. Testler, ağın tahminlerinin gerçeğe yakın olduğunu; alan şiddeti ve yönelmesinde sadece birkaç yüzdelik hata olduğunu gösterdi.
Minik robotlar ve sürülerle gösterimler
Sistemin yalnızca güzel alan haritaları çizmenin ötesinde işe yaradığını kanıtlamak için ekip üç tür minyatür ajanda üzerinde testler yaptı. Önce, milimetre ölçeğindeki manyetik bir “taşıyıcıyı” dallanan patikalarda yönlendirdiler; hızını değiştirmek için alan şiddetini ayarladılar ve kavşaklarda yönlendirmek için iki TME arasında geçiş yaptılar. İkinci olarak, esnek tıbbi problara benzeyen yumuşak, manyetik olarak tepkili filamentleri manyetik alanlarla bükerek mıknatısın yolu ve AÇIK/KAPALI zamanlamasının son şekli nasıl etkilediğini incelediler. Son olarak, manyetik nanoparçacık sürülerini akışkan kanallardan geçirirken sürünün hangi dala gideceğini seçmek için ince alan değişiklikleri kullandılar; bu esnada ortalama hızlarını neredeyse sabit tutabildiler. Her durumda sinir ağı, istenen hareketi elde etmek için gerekli alan ayarlarını hesaplamaya yardımcı oldu.
Gelecek tıp için anlamı
Basitçe söylemek gerekirse, bu çalışma doğrudan elle temas edilemeyecek kadar küçük cihazlar için kompakt bir manyetik “uzaktan kumanda” nasıl inşa edileceğini gösteriyor. Ayarlanabilir kalıcı mıknatısları akıllı yazılımla birleştirerek sistem, büyük bobinlere veya sürekli hareket halinde ağır mıknatıslara gerek kalmadan hassas, yeniden yapılandırılabilir manyetik alanlar sunuyor. Deneyler laboratuvar düzeneklerinde yapılmış olsa da, aynı prensipler hedeflenmiş ilaç teslimi, minimal invaziv cerrahi veya vücut içi gelişmiş görüntüleme için küçük robotları yönlendirmede uygulanabilir. Daha fazla geliştirme ve gerçek zamanlı algılama ile böyle çift robotik manyetik araçlar, bir gün doktorların şu anda güvenli veya mümkün olmayan bölgelere erişip tedavi etmelerine olanak verebilir.
Atıf: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
Anahtar kelimeler: manyetik mikrorobotlar, minimal invaziv cerrahi, robotik uç efektör, nanoparçacık sürüleri, manyetik alan kontrolü