Clear Sky Science · ru
Управление магнитным полем с помощью двух управляемых роботизированных магнитных наконечников
Направление крошечных медицинских роботов невидимыми руками
Представьте, что вы управляете роботом размером с зерно через кровеносные сосуды, доставляя лекарство точно туда, где это нужно, или аккуратно сгибаете probe толщиной с волос, чтобы исследовать внутренности тела. В этой работе предложен новый способ сделать именно это — с помощью тщательно сформированных магнитных полей вместо прямого контакта. Исследователи создали компактный роботизированный инструмент, который умеет эффективно включать и выключать магнитное воздействие и направлять его в разные стороны, что открывает путь к более безопасным и точным медицинским манипуляциям внутри человека. 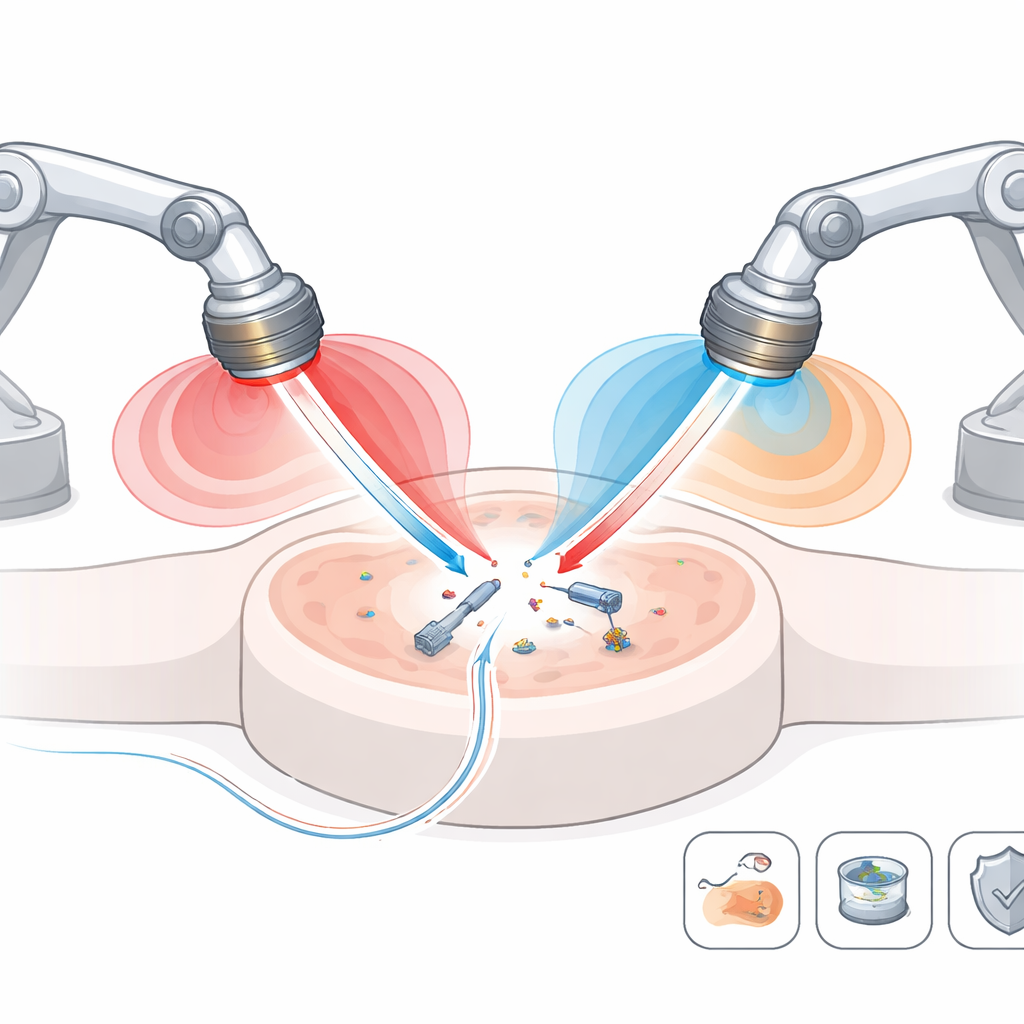
Новый тип магнитного инструмента
Современные системы магнитного управления в медицине часто опираются на громоздкие катушки или большие постоянные магниты, размещённые вокруг пациента. Они могут быть мощными, но их тяжело перемещать, и они не всегда удобны для доступа в узкие участки глубоко внутри тела. Команда предлагает иной подход: «настраиваемый магнитный наконечник» (TME), который устанавливается на кончик стандартного роботизированного манипулятора. В его компактном корпусе размещены несколько постоянных магнитов так, что при вращении внутренних частей их поля либо складываются, создавая сильное притяжение (состояние ON), либо во многом компенсируют друг друга (состояние OFF). Это позволяет роботу менять силу и направление магнитного поля без постоянного размахивания большим магнитом вокруг пациента.
Формирование магнитной «сладкой точки»
Чтобы понять и контролировать возможности этого инструмента, исследователи провели детальные измерения магнитного поля, создаваемого TME, в трёхмерном пространстве. Они меняли положение наконечника, угол всей установки и вращение внутреннего мотора, затем с помощью датчиков картировали изменения в силе и направлении поля. Показано, что один набор настроек в основном меняет величину поля, тогда как другой набор в основном поворачивает его направление — как поворот стрелки компаса без изменения силы притяжения. В рамках куба пространства в несколько сантиметров TME может плавно настраивать поля от почти нуля до примерно 12 миллитесла и создавать резкие градиенты — изменения силы поля на малых расстояниях, которые необходимы для толкания и притягивания крошечных устройств.
Два инструмента лучше, чем один
Хотя одиночный TME может управлять магнитными объектами в одной области, настоящая сила достигается при использовании двух устройств вместе. Разместив два TME на отдельных роботизированных руках и отрегулировав их ориентацию и позиции, команда может создавать разные магнитные «зоны» в одном рабочем объёме. В одной области поле может указывать в одну сторону; рядом — в другую или почти полностью аннулироваться. Это позволяет, например, притянуть крошечный носитель одним инструментом, затем передать управление второму, тихо переключив первый в состояние OFF. Комбинированная система может даже создать особую точку, где поле почти исчезает, что полезно для некоторых методов визуализации и отслеживания. 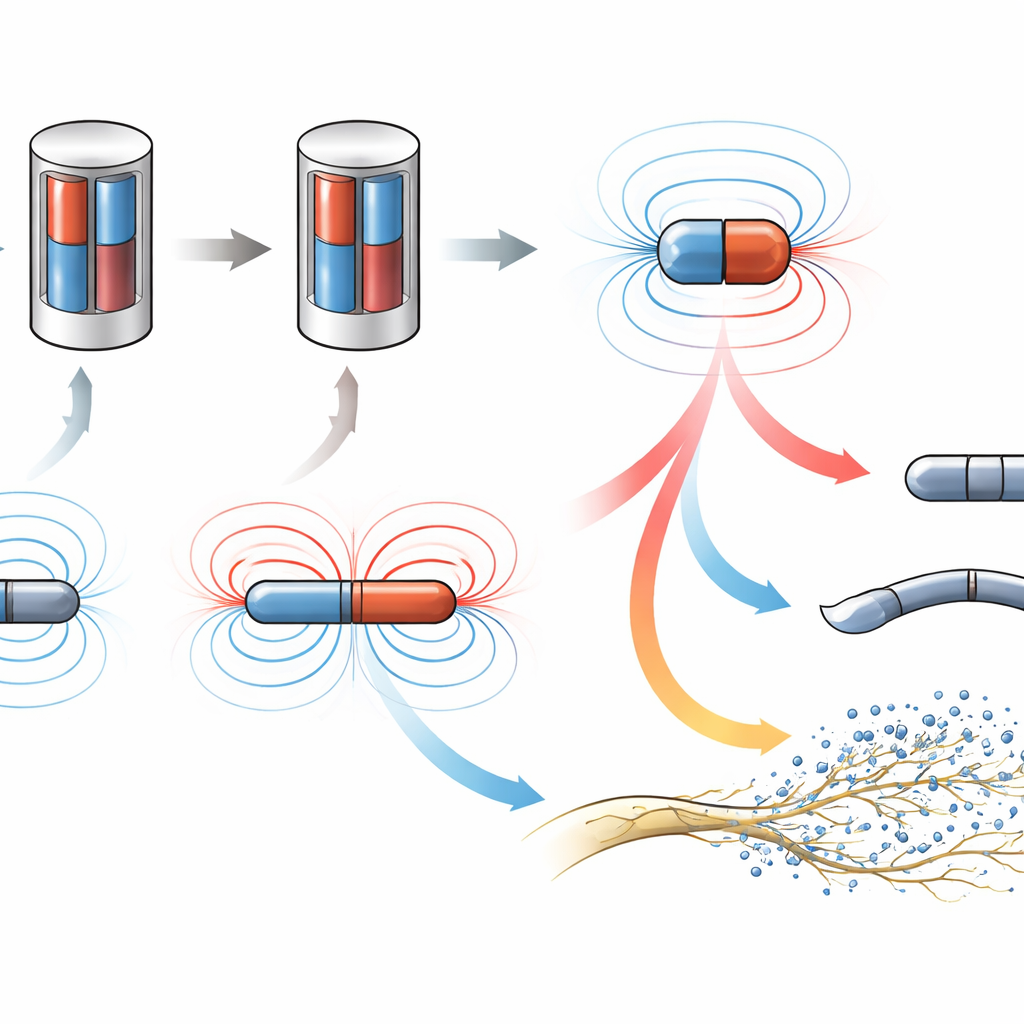
Обучение робота наводить поле
Поскольку зависимость между настройками инструмента и получаемым магнитным полем сложна, исследователи натренировали искусственную нейронную сеть, чтобы помочь. Они собрали большой набор данных — 120 000 различных сочетаний положений и углов — и использовали его, чтобы научить сеть предсказывать, какие настройки создадут желаемую силу и направление поля в заданной точке. После обучения эта модель на основе данных может работать в обратном направлении: пользователь указывает нужное магнитное поле, а сеть предлагает, как должны двигаться роботизированные руки и внутренние моторы. Тесты показали, что предсказания сети близки к реальности — с ошибкой всего в несколько процентов по силе и ориентации поля.
Демонстрации с крошечными роботами и роями
Чтобы доказать, что система способна на большее, чем просто построение карт полей, команда испытала её на трёх типах миниатюрных агентов. Сначала они направляли миллиметровый магнитный «носитель» по ветвящимся путям, меняя силу поля для регулировки скорости и переключаясь между двумя TME, чтобы перенаправлять его на развилках. Затем они использовали поля, чтобы сгибать мягкие магниточувствительные нити, напоминающие гибкие медицинские зонды, исследуя, как траектория магнита и синхронизация состояний ON/OFF влияют на итоговую форму. Наконец, они вели рои магнитных наночастиц по жидкостным каналам, применяя тонкие изменения поля, чтобы выбирать, по какой ветке пойдёт рой, сохраняя при этом почти постоянную среднюю скорость. В каждом случае нейронная сеть помогала вычислять настройки поля, необходимые для получения требуемого движения.
Что это значит для будущей медицины
Проще говоря, работа показывает, как создать компактный магнитный «пульт дистанционного управления» для устройств, которые слишком малы для прямого касания. Комбинируя настраиваемые постоянные магниты с интеллектуальным программным обеспечением, система обеспечивает точные, перенастраиваемые магнитные поля без больших катушек или тяжёлых постоянно перемещающихся магнитов. Хотя эксперименты проводились в лабораторных условиях, те же принципы можно применить для управления крошечными роботами в задачах таргетированной доставки лекарств, минимально инвазивной хирургии или продвинутой визуализации внутри тела. При дальнейшем развитии и использовании датчиков в реальном времени такие двойные роботизированные магнитные инструменты в будущем могут позволить врачам достигать и лечить области, которые в настоящее время труднодоступны или небезопасны для вмешательства.
Цитирование: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
Ключевые слова: магнитные микророботы, минимально инвазивная хирургия, роботизированный захватный элемент, рой наночастиц, управление магнитным полем