Clear Sky Science · fr
Contrôle du champ magnétique avec des effecteurs finaux magnétiques réglables et robotiques doubles
Diriger de minuscules robots médicaux avec des mains invisibles
Imaginez piloter un robot de la taille d’un grain à travers des vaisseaux sanguins pour délivrer un médicament exactement là où il faut, ou courber délicatement une sonde aussi fine qu’un cheveu pour examiner l’intérieur du corps. Cet article présente une nouvelle manière d’y parvenir, en utilisant des champs magnétiques façonnés avec précision au lieu d’un contact direct. Les chercheurs ont construit un outil robotique compact capable d’activer et de désactiver efficacement le magnétisme et de l’orienter dans différentes directions, ouvrant la voie à des procédures médicales internes plus sûres et plus précises. 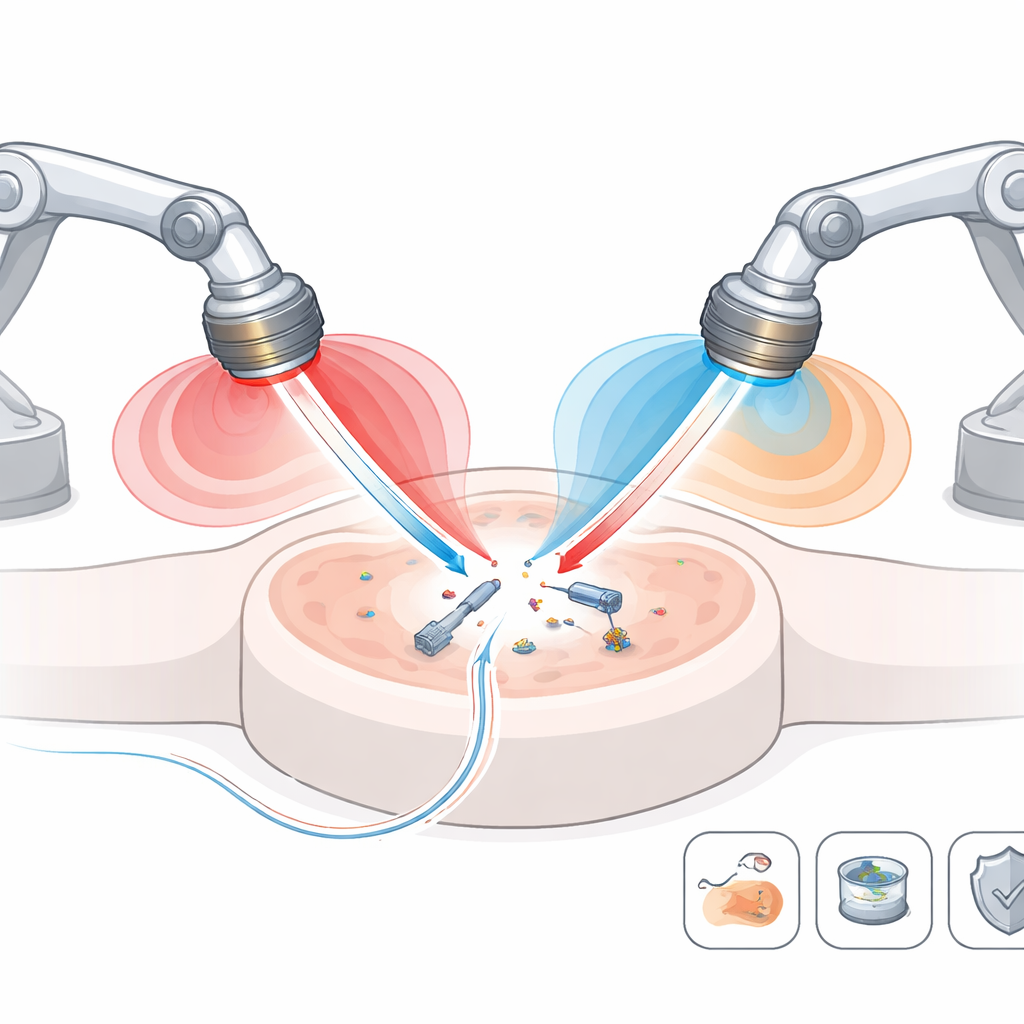
Un nouveau type d’outil magnétique
Les systèmes actuels de contrôle magnétique en médecine reposent souvent sur des bobines volumineuses ou de grands aimants permanents installés autour du patient. Ils peuvent être puissants mais difficiles à déplacer, et ne sont pas toujours idéaux pour atteindre des zones étroites en profondeur. L’équipe propose une approche différente : un « effecteur final magnétique réglable », ou TME, monté à l’extrémité d’un bras robotique standard. Dans son boîtier compact se trouvent plusieurs aimants permanents disposés de sorte qu’en faisant pivoter les pièces internes, leurs champs peuvent soit s’additionner pour produire une forte attraction (état ON), soit en grande partie s’annuler (état OFF). Cela permet au robot de modifier l’intensité et la direction du champ magnétique sans avoir à balancer en permanence un grand aimant autour du patient.
Façonner la zone d’efficacité magnétique
Pour comprendre et contrôler les capacités de cet outil, les chercheurs ont réalisé des mesures détaillées du champ magnétique créé par le TME dans l’espace tridimensionnel. Ils ont varié sa position, l’angle de l’ensemble de l’outil et la rotation d’un moteur interne, puis utilisé des capteurs pour cartographier comment l’intensité et la direction du champ évoluaient. Ils ont montré qu’un ensemble de réglages modifie principalement l’intensité du champ, tandis qu’un autre ensemble en fait surtout tourner la direction, comme faire pivoter une aiguille de boussole sans changer la force d’attraction. Dans un cube d’espace de quelques centimètres de côté, le TME peut régler en douceur des champs allant de presque zéro jusqu’à environ 12 millitesla et créer des gradients marqués—variations d’intensité sur de petites distances—essentiels pour pousser et attirer de minuscules dispositifs.
Deux outils valent mieux qu’un
Si un seul TME peut contrôler des objets magnétiques dans une région, la véritable puissance apparaît en en utilisant deux simultanément. En plaçant deux TME sur des bras robotiques séparés et en ajustant leur orientation et leur position, l’équipe peut créer différentes « zones » magnétiques dans le même espace de travail. Dans une zone, le champ peut pointer dans une direction ; à proximité, il peut pointer autrement ou s’annuler presque totalement. Cela rend possible, par exemple, d’attirer un minuscule transporteur avec un outil, puis de transférer le contrôle au second en passant discrètement le premier en état OFF. Le système combiné peut même créer un point spécial où le champ s’annule presque, utile pour certaines techniques d’imagerie et de suivi. 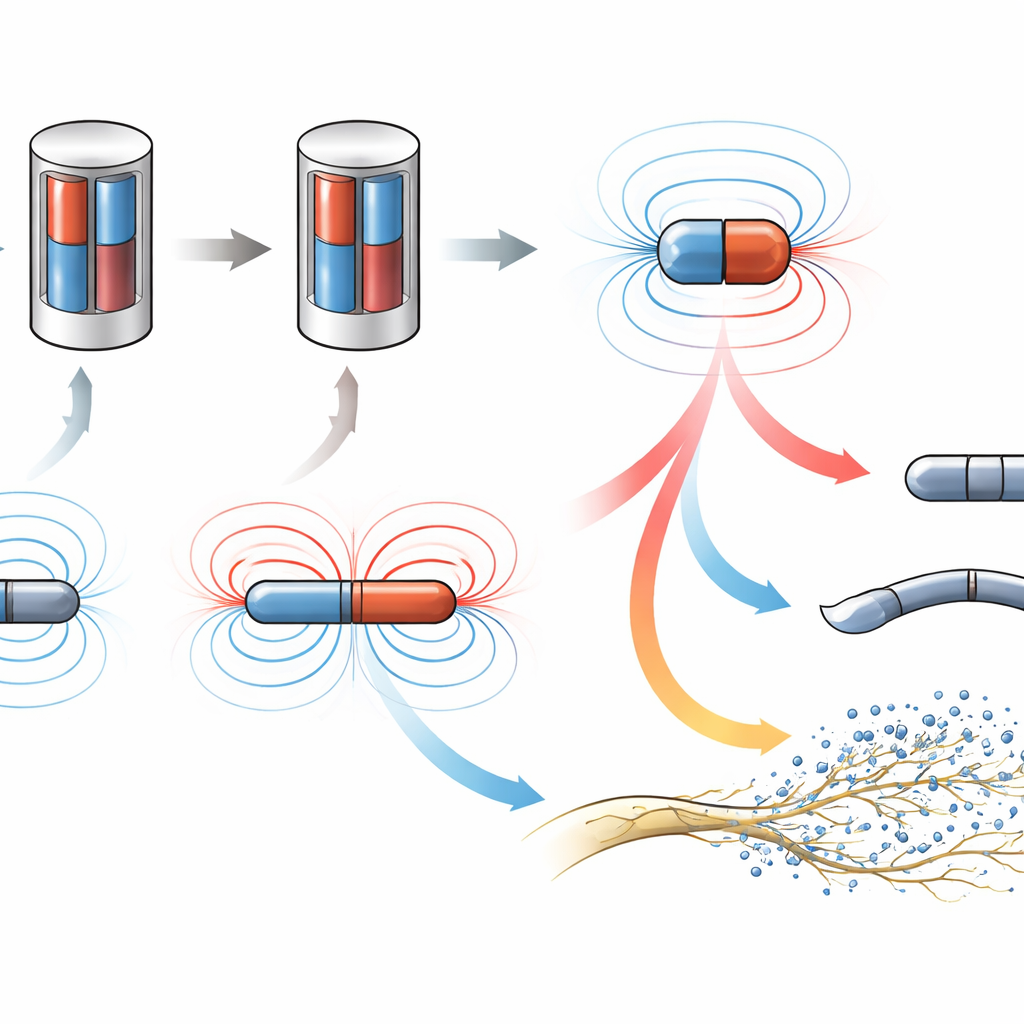
Apprendre au robot à viser le champ
Comme la relation entre les réglages de l’outil et le champ magnétique résultant est complexe, les chercheurs ont entraîné un réseau de neurones artificiels pour les aider. Ils ont collecté un grand jeu de données—120 000 combinaisons différentes de positions et d’angles—et l’ont utilisé pour apprendre au réseau à prédire quels réglages produiront une intensité et une direction de champ souhaitées en un point donné. Une fois entraîné, ce modèle basé sur les données peut fonctionner à l’envers : l’utilisateur spécifie le champ magnétique désiré, et le réseau suggère comment déplacer les bras robotiques et les moteurs internes. Les tests ont montré que les prédictions du réseau étaient proches de la réalité, avec seulement quelques pourcents d’erreur en intensité et en orientation du champ.
Démonstrations avec de minuscules robots et des essaims
Pour prouver que le système fait plus que tracer de jolies cartes de champ, l’équipe l’a testé sur trois types d’agents miniatures. D’abord, ils ont guidé un « transporteur » magnétique de l’échelle millimétrique le long de chemins ramifiés, ajustant l’intensité du champ pour modifier sa vitesse et en alternant entre les deux TME pour le rediriger aux jonctions. Ensuite, ils ont utilisé les champs pour plier des filaments souples et magnétiquement sensibles ressemblant à des sondes médicales flexibles, explorant comment la trajectoire de l’aimant et le timing ON/OFF influencent la forme finale. Enfin, ils ont guidé des essaims de nanoparticules magnétiques dans des canaux fluides, employant de subtiles variations de champ pour sélectionner la branche que l’essaim suivrait tout en maintenant sa vitesse moyenne presque constante. Dans chaque cas, le réseau de neurones a aidé à calculer les réglages de champ nécessaires pour obtenir le mouvement désiré.
Ce que cela signifie pour la médecine de demain
En termes simples, ce travail montre comment construire une « télécommande » magnétique compacte pour des dispositifs trop petits pour être touchés directement. En combinant des aimants permanents réglables avec un logiciel intelligent, le système délivre des champs magnétiques précis et reconfigurables sans bobines volumineuses ni lourds aimants en mouvement constant. Bien que les expériences aient été réalisées en laboratoire, les mêmes principes pourraient s’appliquer pour guider de minuscules robots destinés à la délivrance ciblée de médicaments, à la chirurgie peu invasive ou à l’imagerie avancée à l’intérieur du corps. Avec des développements supplémentaires et une détection en temps réel, de tels outils magnétiques robotiques doubles pourraient un jour permettre aux médecins d’atteindre et de traiter des zones actuellement difficiles ou impossibles d’accès en toute sécurité.
Citation: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
Mots-clés: microrobots magnétiques, chirurgie peu invasive, effecteur final robotique, essaims de nanoparticules, contrôle du champ magnétique