Clear Sky Science · de
Magnetfeldsteuerung mit zwei robotischen, einstellbaren magnetischen Endeffektoren
Winzige medizinische Roboter mit unsichtbaren Händen lenken
Stellen Sie sich vor, Sie steuern einen sandkorn‑großen Roboter durch Blutgefäße, um Medikamente genau dort abzugeben, wo sie gebraucht werden, oder biegen eine haarfeine Sonde sanft zur Untersuchung des Körperinneren. Dieses Paper stellt eine neue Methode vor, die genau das ermöglicht: sorgfältig geformte Magnetfelder statt direkten Kontakts. Die Forschenden haben ein komp aktes robotisches Werkzeug entwickelt, das Magnetismus effektiv ein‑ und ausschalten sowie in verschiedene Richtungen ausrichten kann. Das eröffnet die Möglichkeit für sicherere und präzisere medizinische Eingriffe im menschlichen Körper. 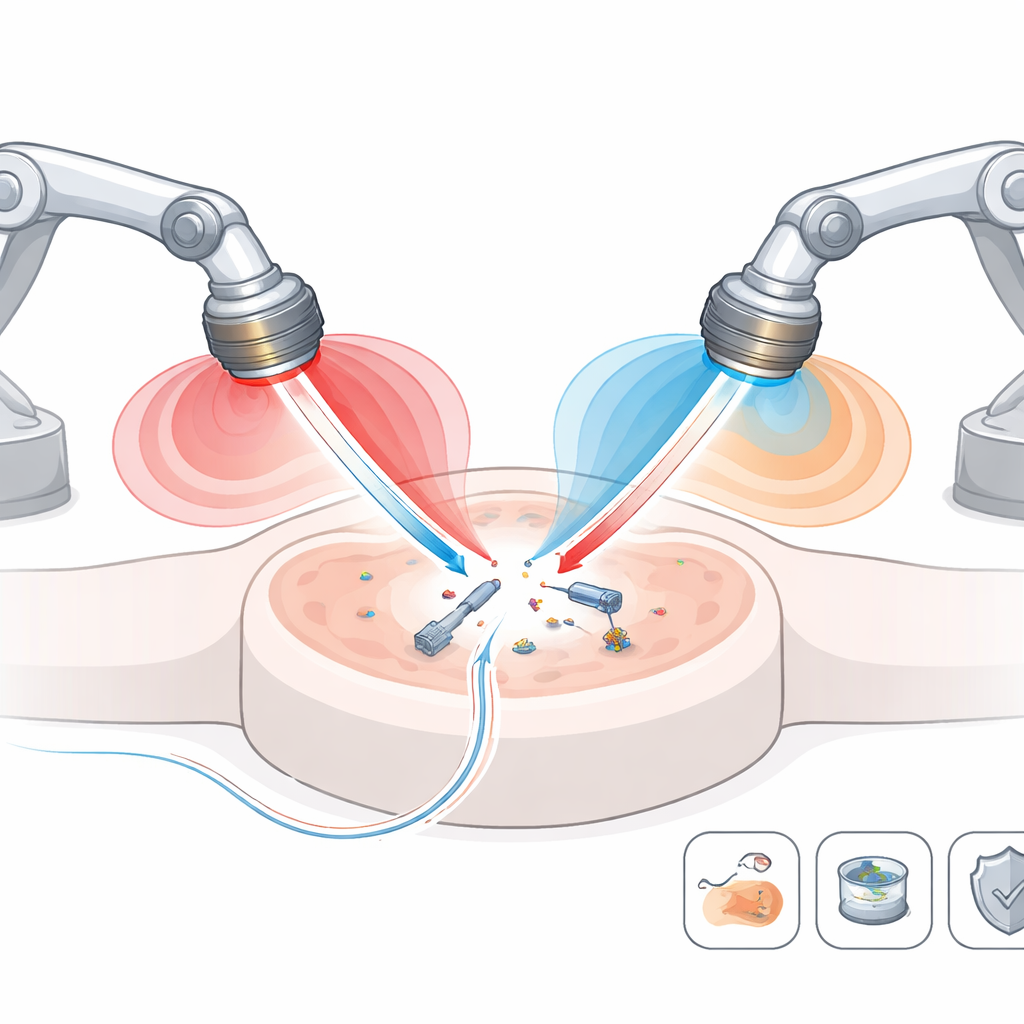
Eine neue Art magnetisches Werkzeug
Heutige Systeme zur magnetischen Steuerung in der Medizin beruhen oft auf sperrigen Spulen oder großen Permanentmagneten, die um den Patienten angeordnet sind. Diese können zwar stark sein, lassen sich aber nur schwer bewegen und sind nicht immer ideal, um enge Bereiche tief im Körper zu erreichen. Das Team stellt einen anderen Ansatz vor: einen „einstellbaren magnetischen Endeffektor“ (TME), der an der Spitze eines standardmäßigen Roboterarms montiert wird. In seinem kompakten Gehäuse befinden sich mehrere Permanentmagneten so angeordnet, dass durch Rotation interner Bauteile ihre Felder entweder zusammenwirken und eine starke Anziehung erzeugen (ON‑Zustand) oder sich weitgehend aufheben (OFF‑Zustand). So kann der Roboter die Stärke und Richtung des Magnetfelds ändern, ohne ständig einen großen Magneten um den Patienten schwenken zu müssen.
Den magnetischen Sweetspot formen
Um zu verstehen und zu kontrollieren, was dieses Werkzeug leisten kann, führten die Forschenden detaillierte Messungen des Magnetfelds durch, das der TME im dreidimensionalen Raum erzeugt. Sie variierten seine Position, den Winkel des gesamten Werkzeugs und die Rotation eines internen Motors und nutzten dann Sensoren, um abzubilden, wie sich Feldstärke und -richtung veränderten. Sie zeigten, dass ein Satz von Einstellungen hauptsächlich die Feldstärke verändert, während ein anderer Satz größtenteils die Richtung rotiert — ähnlich dem Drehen einer Kompassnadel, ohne die Zugkraft wesentlich zu verändern. Innerhalb eines Würfels von wenigen Zentimetern Kantenlänge kann der TME das Feld glatt von nahezu null bis etwa 12 Millitesla einstellen und scharfe Gradienten erzeugen — Änderungen der Feldstärke über kurze Distanzen —, die entscheidend sind, um winzige Geräte zu schieben oder zu ziehen.
Zwei Werkzeuge sind besser als eines
Während ein einzelner TME magnetische Objekte in einer Region steuern kann, liegt die wahre Stärke in der Kombination zweier Einheiten. Indem zwei TMEs an separaten Roboterarmen angebracht und ihre Ausrichtung sowie Position angepasst werden, kann das Team unterschiedliche magnetische „Zonen" im selben Arbeitsraum erzeugen. In einem Bereich kann das Feld in eine Richtung zeigen; in der Nähe kann es anders gerichtet sein oder sich nahezu vollständig aufheben. Das macht es möglich, beispielsweise einen winzigen Träger mit einem Werkzeug anzuziehen und dann die Kontrolle leise an das zweite zu übergeben, indem das erste in den OFF‑Zustand geschaltet wird. Das kombinierte System kann sogar einen speziellen Punkt erzeugen, an dem das Feld nahezu verschwindet — nützlich für gewisse Bildgebungs‑ und Verfolgungstechniken. 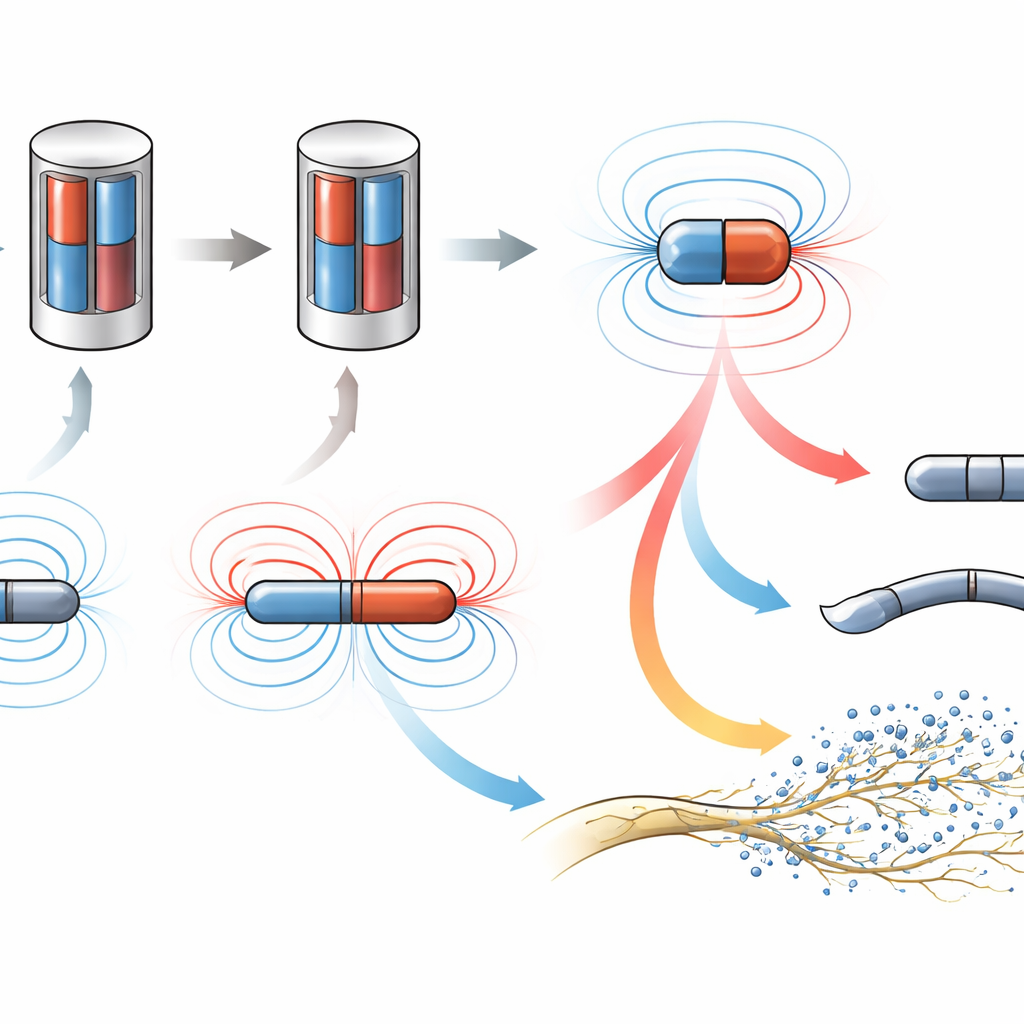
Dem Roboter beibringen, das Feld zu zielen
Da die Beziehung zwischen den Einstellungen des Werkzeugs und dem resultierenden Magnetfeld komplex ist, trainierten die Forschenden ein künstliches neuronales Netzwerk zur Unterstützung. Sie sammelten einen großen Datensatz — 120.000 verschiedene Kombinationen aus Positionen und Winkeln — und nutzten ihn, um das Netzwerk zu lehren, welche Einstellungen bei einem bestimmten Punkt eine gewünschte Feldstärke und -richtung erzeugen. Einmal trainiert, kann dieses datengetriebene Modell umgekehrt arbeiten: Ein Anwender gibt das gewünschte Magnetfeld vor, und das Netzwerk schlägt vor, wie sich die Roboterarme und internen Motoren bewegen sollten. Tests zeigten, dass die Vorhersagen des Netzwerks nahe an der Realität lagen, mit nur wenigen Prozent Fehlern bei Feldstärke und Ausrichtung.
Demonstrationen mit winzigen Robotern und Schwärmen
Um zu beweisen, dass das System mehr kann als nur ansprechende Feldkarten zu zeichnen, testete das Team es an drei Arten von Miniaturagenten. Zuerst steuerten sie einen millimetergroßen magnetischen „Träger“ entlang verzweigter Pfade, passten die Feldstärke an, um seine Geschwindigkeit zu verändern, und wechselten zwischen den beiden TMEs, um ihn an Verzweigungen umzulenken. Zweitens nutzten sie die Felder, um weiche, magnetisch reagierende Filamente zu biegen, die flexiblen medizinischen Sonden ähneln, und untersuchten, wie der Weg des Magneten und dessen ON/OFF‑Timing die Endform beeinflussen. Schließlich lenkten sie Schwärme magnetischer Nanopartikel durch Flüssigkeitskanäle und nutzten subtile Feldänderungen, um zu bestimmen, welchen Ast der Schwarm wählt, während seine mittlere Geschwindigkeit nahezu konstant blieb. In jedem Fall half das neuronale Netzwerk, die Feld‑Einstellungen zu berechnen, die nötig waren, um die gewünschte Bewegung zu erreichen.
Was das für die Medizin der Zukunft bedeutet
Einfach gesagt zeigt diese Arbeit, wie man eine kompakte magnetische „Fernbedienung" für Geräte baut, die zu klein sind, um sie direkt zu berühren. Durch die Kombination einstellbarer Permanentmagneten mit intelligenter Software liefert das System präzise, rekonfigurierbare Magnetfelder ohne große Spulen oder schwere, ständig bewegte Magnete. Obwohl die Experimente in Laboraufbauten durchgeführt wurden, könnten dieselben Prinzipien angewendet werden, um winzige Roboter für gezielte Medikamentenabgabe, minimalinvasive Chirurgie oder fortgeschrittene Bildgebung im Körper zu führen. Mit weiterer Entwicklung und Echtzeit‑Sensorik könnten solche dualen robotischen Magnetwerkzeuge eines Tages Ärzten ermöglichen, Bereiche zu erreichen und zu behandeln, die heute schwer oder nicht sicher zugänglich sind.
Zitation: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
Schlüsselwörter: magnetische Mikroroboter, minimalinvasive Chirurgie, robotischer Endeffektor, Nanopartikel‑Schwärme, Magnetfeldsteuerung