Clear Sky Science · sv
Magnetfältstyrning med dubbla robotiska, ställbara magnetiska ändeffektorer
Vägleda pyttesmå medicinska robotar med osynliga händer
Föreställ dig att styra en kornstor robot genom blodkärl för att leverera medicin exakt där den behövs, eller varsamt böja en hårtunn sond för att undersöka kroppens inre. Denna artikel presenterar ett nytt sätt att göra just det, genom noggrant formade magnetfält i stället för direkt kontakt. Forskarna har byggt ett kompakt robotverktyg som effektivt kan slå på och av magnetism och rikta den i olika riktningar, vilket öppnar dörren till säkrare och mer precisa medicinska ingrepp inuti människokroppen. 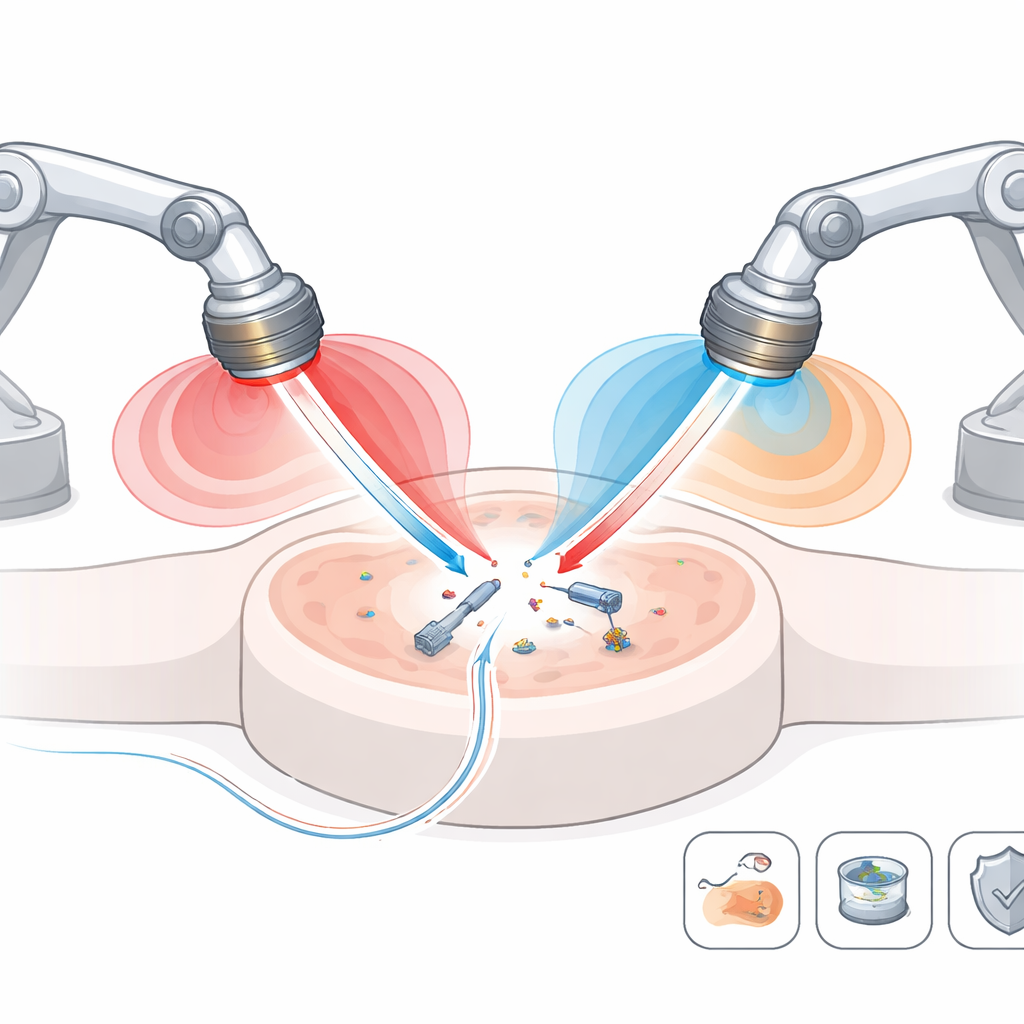
En ny typ av magnetverktyg
Dagens system för magnetisk styrning inom medicin förlitar sig ofta på klumpiga spolar eller stora permanenta magneter placerade runt patienten. Dessa kan vara kraftfulla men svåra att röra, och de är inte alltid idealiska för att nå trånga områden djupt i kroppen. Teamet introducerar en annan metod: en "ställbar magnetisk ändeffektor", eller TME, som monteras på spetsen av en standard robotarm. Inuti dess kompakta hölje finns flera permanenta magneter arrangerade så att deras fält, genom rotation av interna delar, antingen kan förstärka varandra för att skapa ett starkt drag (PÅ-läge) eller i stor utsträckning ta ut varandra (AV-läge). Detta gör att roboten kan ändra styrka och riktning på magnetfältet utan att ständigt svänga en stor magnet runt patienten.
Forma den magnetiska "söta punkten"
För att förstå och kontrollera vad detta verktyg kan göra genomförde forskarna detaljerade mätningar av det magnetiska fält som TME skapar i tredimensionellt utrymme. De varierade dess position, verktygets helhetsvinkel och rotationen av en intern motor, och använde sedan sensorer för att kartlägga hur fältstyrka och riktning förändrades. De visade att en uppsättning inställningar främst ändrar hur starkt fältet är, medan en annan uppsättning mest roterar dess riktning, ungefär som att vrida en kompassnål utan att ändra hur hårt den drar. Inom en kub av rymd några centimeter bred kan TME smidigt ställa in fält från nästan noll upp till cirka 12 millitesla och skapa skarpa gradienter — förändringar i fältstyrka över små avstånd — som är avgörande för att trycka och dra i pyttesmå enheter.
Två verktyg är bättre än ett
Medan en enskild TME kan kontrollera magnetiska objekt i en region ligger den verkliga styrkan i att använda två tillsammans. Genom att placera två TME på separata robotarmar och justera hur de är riktade och var de sitter, kan teamet skapa olika magnetiska "zoner" i samma arbetsområde. I ett område kan fältet peka åt ett håll; intill kan det peka åt ett annat eller nästan ta ut varandra helt. Detta gör det möjligt, till exempel, att attrahera en liten bärare med ett verktyg och sedan överlämna kontrollen till det andra genom att tyst byta det första till sitt AV-läge. Det kombinerade systemet kan till och med skapa en särskild punkt där fältet nästan försvinner, vilket är användbart för vissa bild- och spårningstekniker. 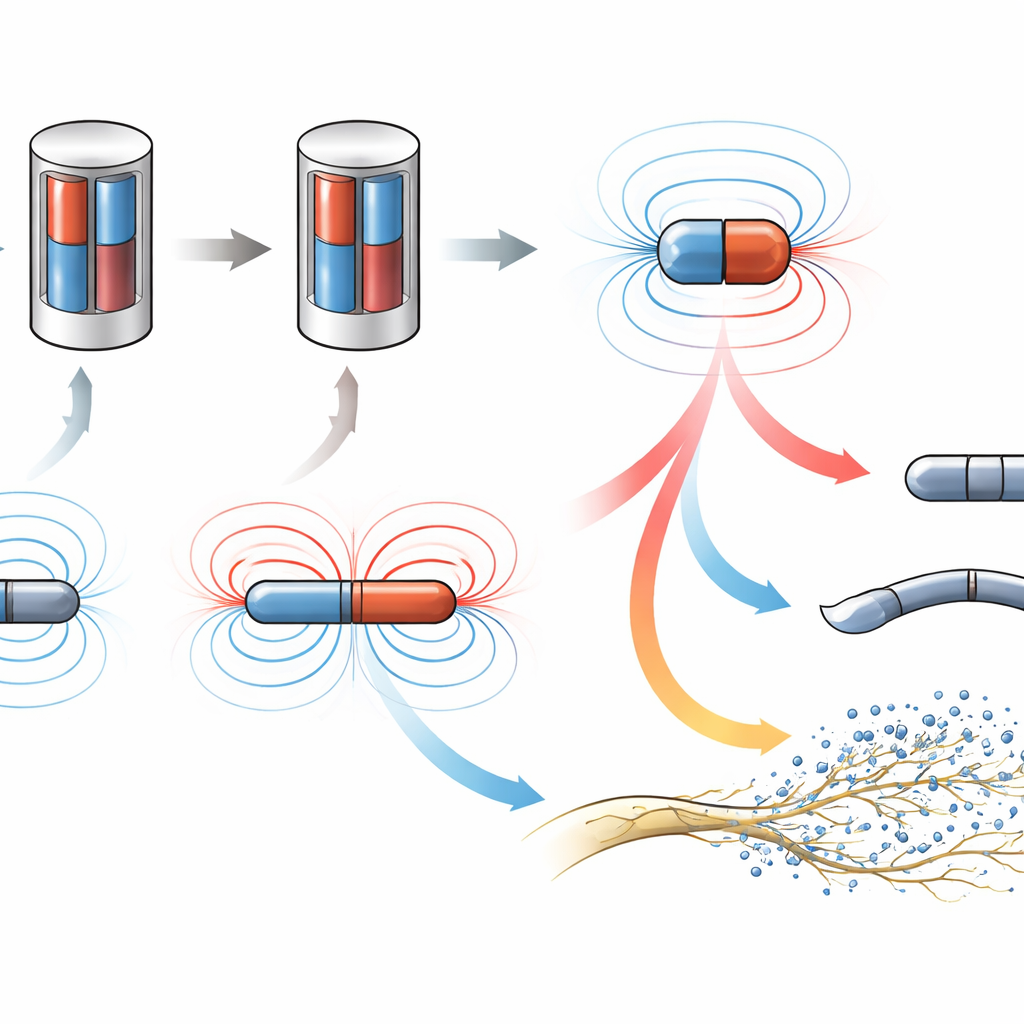
Att lära roboten att sikta fältet
Eftersom förhållandet mellan verktygets inställningar och det resulterande magnetfältet är komplext tränade forskarna ett artificiellt neuralt nätverk för att hjälpa till. De samlade en stor datamängd — 120 000 olika kombinationer av positioner och vinklar — och använde den för att lära nätverket hur man förutser vilka inställningar som ger en önskad fältstyrka och riktning på en viss punkt. När det väl var tränat kan denna datadrivna modell fungera i omvänd riktning: en användare anger det magnetfält de vill ha, och nätverket föreslår hur robotarmarna och de interna motorerna bör röra sig. Tester visade att nätverkets prediktioner låg nära verkligheten, med endast ett par procents fel i fältstyrka och orientering.
Demonstrationer med pyttesmå robotar och svärmar
För att bevisa att systemet kan mer än att bara rita vackra fältkartor testade teamet det på tre typer av miniatyra agenter. Först styrde de en millimeterralig magnetisk "bärare" längs förgrenade banor, justerade fältstyrkan för att förändra dess hastighet och växlade mellan de två TME för att omdirigera den vid knutpunkter. För det andra använde de fälten för att böja mjuka, magnetiskt responsiva filament som liknar flexibla medicinska sonder, och utforskade hur magnetens bana och dess PÅ/AV-timing förändrar slutformen. Slutligen vägledde de svärmar av magnetiska nanopartiklar genom vätskekanaler, med subtila fältförändringar för att välja vilken gren svärmen skulle följa samtidigt som dess genomsnittliga hastighet hölls nästan konstant. I varje fall hjälpte det neurala nätverket till att beräkna de fältinställningar som krävdes för att uppnå önskad rörelse.
Vad detta betyder för framtida medicin
Enkelt uttryckt visar detta arbete hur man bygger en kompakt magnetisk "fjärrkontroll" för enheter för små för att nås direkt. Genom att kombinera ställbara permanenta magneter med smart programvara levererar systemet precisa, omkonfigurerbara magnetfält utan stora spolar eller tunga, ständigt rörliga magneter. Även om experimenten utfördes i laboratoriemiljöer kan samma principer tillämpas för att styra pyttesmå robotar för riktad läkemedelsleverans, minimalt invasiv kirurgi eller avancerad bildgivning inuti kroppen. Med vidare utveckling och realtidssensorik skulle sådana dubbla robotiska magnetverktyg en dag kunna låta läkare nå och behandla områden som idag är svåra eller omöjliga att komma åt säkert.
Citering: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
Nyckelord: magnetiska mikrorobotar, minimalt invasiv kirurgi, robotisk ändeffektor, nanopartikelsvärmar, magnetfältsstyrning