Clear Sky Science · he
בקרה על שדה מגנטי עם אפקטורים קיצוניים מגנטיים מתכווננים על ידי רובוטים כפולים
הנחיית רובוטים רפואיים זעירים בידיים בלתי נראות
דמיינו נהיגה ברובוט בגודל גרגיר בתוך כלי דם כדי למסור תרופה בדיוק במקום הנדרש, או כיפוף עדין של חישה דקה כדבר לבדוק את פנים הגוף. מאמר זה מציג שיטה חדשה לעשות זאת, באמצעות שדות מגנטיים מעוצבים בקפידה במקום מגע ישיר. החוקרים בנו כלי רובוטי קומפקטי שיכול להדליק ולכבות מגנטיות באופן יעיל ולכוון אותה בכיוונים שונים, ובכך לפתוח אפשרויות להליכים רפואיים מדויקים ובטוחים יותר בתוך גוף האדם. 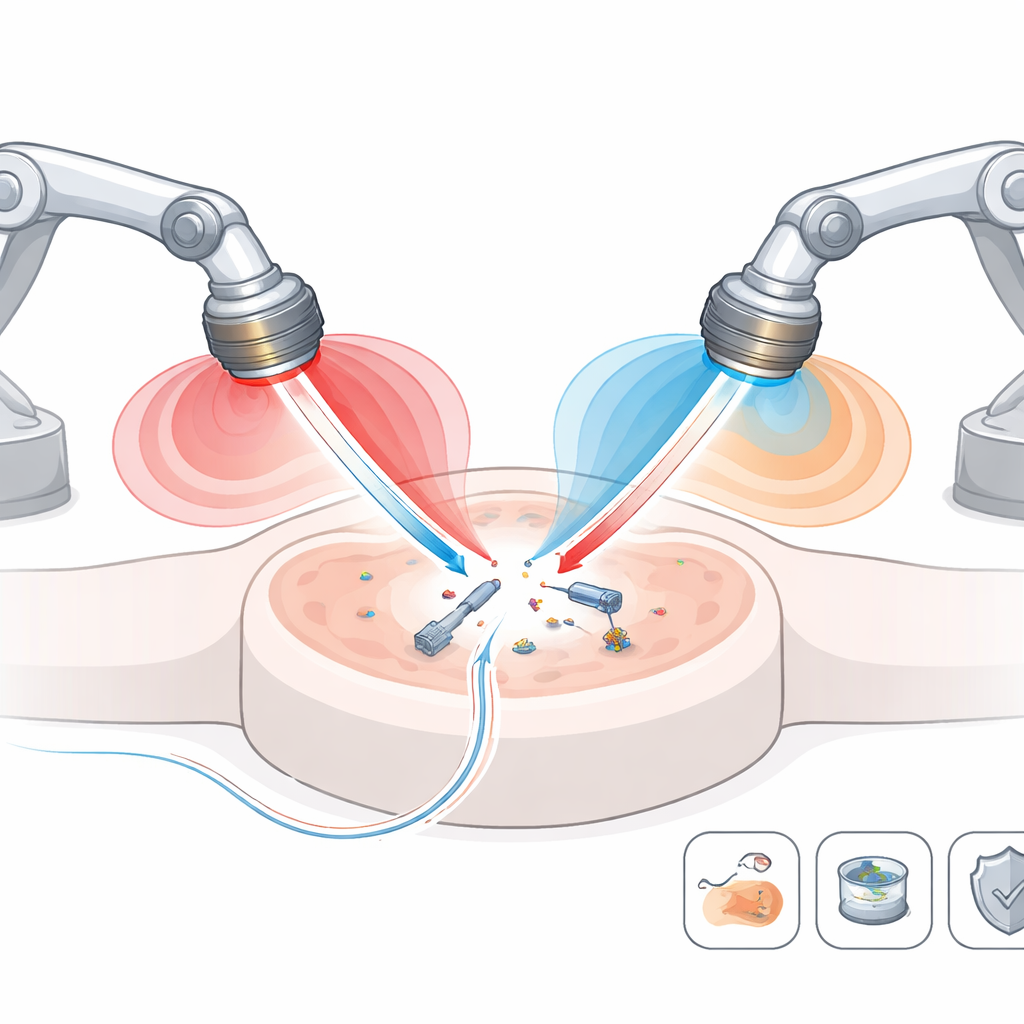
סוג חדש של כלי מגנטי
המערכות הקיימות לבקרה מגנטית ברפואה לעיתים נשענות על סלילים מגודלים או מגנטים קבועים גדולים מסביב למטופל. אלו יכולים להיות חזקים אך קשים להזזה, ולא תמיד מתאימים להגיע למקומות צרים עמוק בגוף. הצוות מציג גישה שונה: "אפקטור קצה מגנטי מתכוונן" (TME) המותקן בקצה זרוע רובוטית סטנדרטית. בתוך מארזו הקומפקטי ממוקמים מספר מגנטים קבועים כך שבעת סיבוב חלקים פנימיים, שדותיהם יכולים להתחבר ליצירת משיכה חזקה (מצב ON) או לבטל זה את זה במידה רבה (מצב OFF). הדבר מאפשר לרובוט לשנות את עוצמת וכיוון השדה המגנטי בלי להזיז מגנט גדול כל הזמן סביב המטופל.
עיצוב "הנקודה המתוקה" של השדה המגנטי
כדי להבין ולשלוט במה שהכלי יכול לעשות, ביצעו החוקרים מדידות מפורטות של השדה המגנטי שה-TME יוצר במרחב תלת‑ממדי. הם שינו את מיקומו, את זווית הכלי כולו ואת סיבוב מנוע פנימי, ואז השתמשו בחיישנים למיפוי איך עוצמת וכיוון השדה משתנים. הם הראו שקבוצה אחת של הגדרות משנה בעיקר את עוצמת השדה, בעוד שקבוצה אחרת מסובבת בעיקר את כיוונו, כמו סיבוב מצפן בלי לשנות את כוח המשיכה. בתוך קובייה של מרחב ברוחב כמה סנטימטרים, ה-TME יכול לכייל שדות בצורה חלקה מתקרובת לאפס ועד כ-12 מילי-טסלה וליצור גרדיאנטים חדים — שינויים בעוצמת השדה על פני מרחקים קטנים — החיוניים לדחיפה ומשיכה של מכשירים זעירים.
שניים טובים יותר מאחד
בעוד ש-TME יחיד יכול לשלוט באובייקטים מגנטיים באזור אחד, העוצמה האמיתית נובעת משימוש בשניים יחד. על ידי הצבת שני TMEs על זרועות רובוטיות נפרדות והתאמת כיווניהם ומיקומם, הצליחה הקבוצה ליצור "אזורי" שדה מגנטי שונים באותו מרחב עבודה. באזור אחד השדה עשוי להצביע בכיוון אחד; בסמיכות הוא עשוי להצביע בכיוון אחר או להתאפס כמעט לחלוטין. זה מאפשר, לדוגמא, למשוך נשא מגנטי זעיר בעזרת כלי אחד, ואז להעביר את השליטה לשני על ידי הפיכת הראשון למצב OFF בשקט. המערכת המשולבת יכולה אפילו ליצור נקודה מיוחדת שבה השדה כמעט נעלם, דבר שימושי לשיטות הדמיה ומעקב מסוימות. 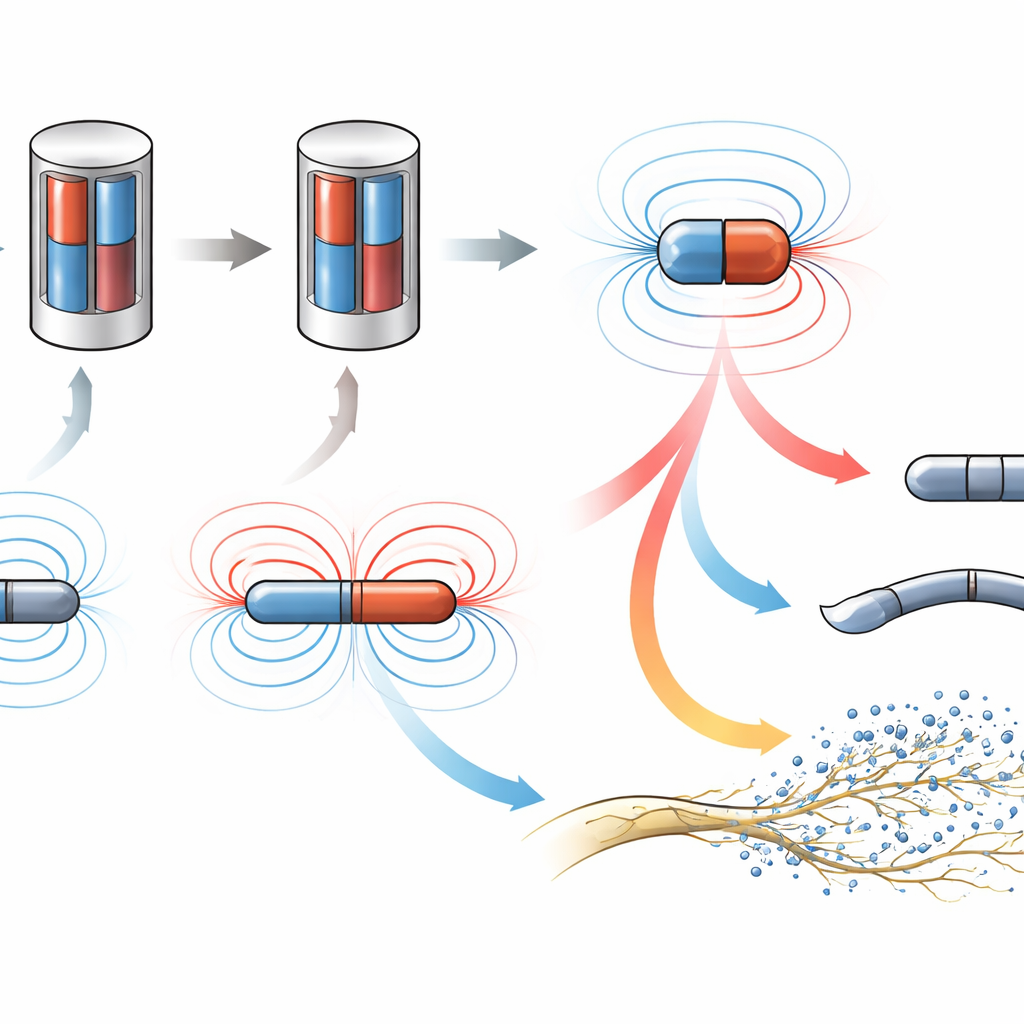
ללמד את הרובוט לכוון את השדה
מכיוון שהקשר בין הגדרות הכלי והשדה המגנטי הנוצר מורכב, אימנו החוקרים רשת נוירונים מלאכותית לסיוע. הם אספו מאגר נתונים גדול — 120,000 שילובים שונים של מיקומים וזוויות — והשתמשו בו כדי ללמד את הרשת לחזות אילו הגדרות ייצרו עוצמה וכיוון שדה רצויים בנקודה נתונה. לאחר האימון, המודל הנתמך בנתונים יכול לעבוד בהיפוך: משתמש מגדיר את השדה המגנטי הרצוי, והרשת מציעה כיצד זרועות הרובוט והמנועים הפנימיים צריכים לנוע. ניסויים הראו שאמירות הרשת היו קרובות למציאות, עם שגיאה של אחוזים בודדים בלבד בעוצמה ובכיוון השדה.
הדגמות עם רובוטים זעירים ועדרים
כדי להוכיח שמערכת יכולה לעשות יותר ממיפוי שדות יפים, צוות החוקרים בחן אותה על שלושה סוגים של סוכנים זעירים. ראשית, הם הנחו נשא מגנטי בקנה מידה מילימטרי לאורך נתיבים מתפצלים, תוך כוונון עוצמת השדה לשינוי מהירותו והחלפה בין שני ה-TMEs כדי להכווין אותו בצמתים. שנית, הם השתמשו בשדות כדי לכופף סיבים רכים רגישים למגנטיות, המזכירים גששים גמישים רפואיים, ובחנו כיצד מסלול המגנט ותזמון מצב ה-ON/OFF משפיעים על הצורה הסופית. לבסוף, הם הנחו עדרים של חלקיקים ננו‑מגנטיים דרך ערוצי נוזל, תוך שימוש בשינויים עדינים בשדה כדי לבחור לאיזה סניף העדר יפנה, בעוד מהירותו הממוצעת נשמרת כמעט קבועה. בכל מקרה, הרשת הנוירונלית סייעה לחשב את הגדרות השדה הנדרשות להשגת התנועה הרצויה.
מה משמעות הדבר לרפואה העתידית
במילים פשוטות, עבודה זו מראה כיצד לבנות "שלט רחוק" מגנטי קומפקטי למכשירים קטנים מדי כדי לגעת בהם ישירות. על ידי שילוב מגנטים קבועים מתכווננים עם תוכנה חכמה, המערכת מספקת שדות מגנטיים מדויקים וכיוליים ללא סלילים גדולים או מגנטים כבדים הזזים כל הזמן. אף על פי שהניסויים נערכו בסביבות מעבדה, אותם עקרונות ניתנים ליישום להנחיית מיקרורובוטים להעברת תרופות ממוקדת, ניתוח פולשני מינימלי או הדמיה מתקדמת בתוך הגוף. בהתפתחות נוספת ובחישה בזמן אמת, כלים מגנטיים רובוטיים כפולים כאלה עשויים יום אחד לאפשר לרופאים להגיע ולטפל באזורים שקשה או בלתי אפשרי להגיע אליהם בבטחה כיום.
ציטוט: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
מילות מפתח: מיקרורובוטים מגנטיים, ניתוח פולשני מינימלי, אפקטור קצה רובוטי, מזימות חלקיקים ננו-מגנטיים, בקרת שדה מגנטי