Clear Sky Science · en
Magnetic field control with dual robotic tunable magnetic end effectors
Guiding Tiny Medical Robots with Invisible Hands
Imagine steering a grain‑sized robot through blood vessels to deliver medicine exactly where it is needed, or gently bending a hair‑thin probe to inspect the inside of the body. This paper presents a new way to do just that, using carefully shaped magnetic fields instead of direct contact. The researchers have built a compact robotic tool that can turn magnetism effectively on and off and aim it in different directions, opening the door to safer and more precise medical procedures inside the human body. 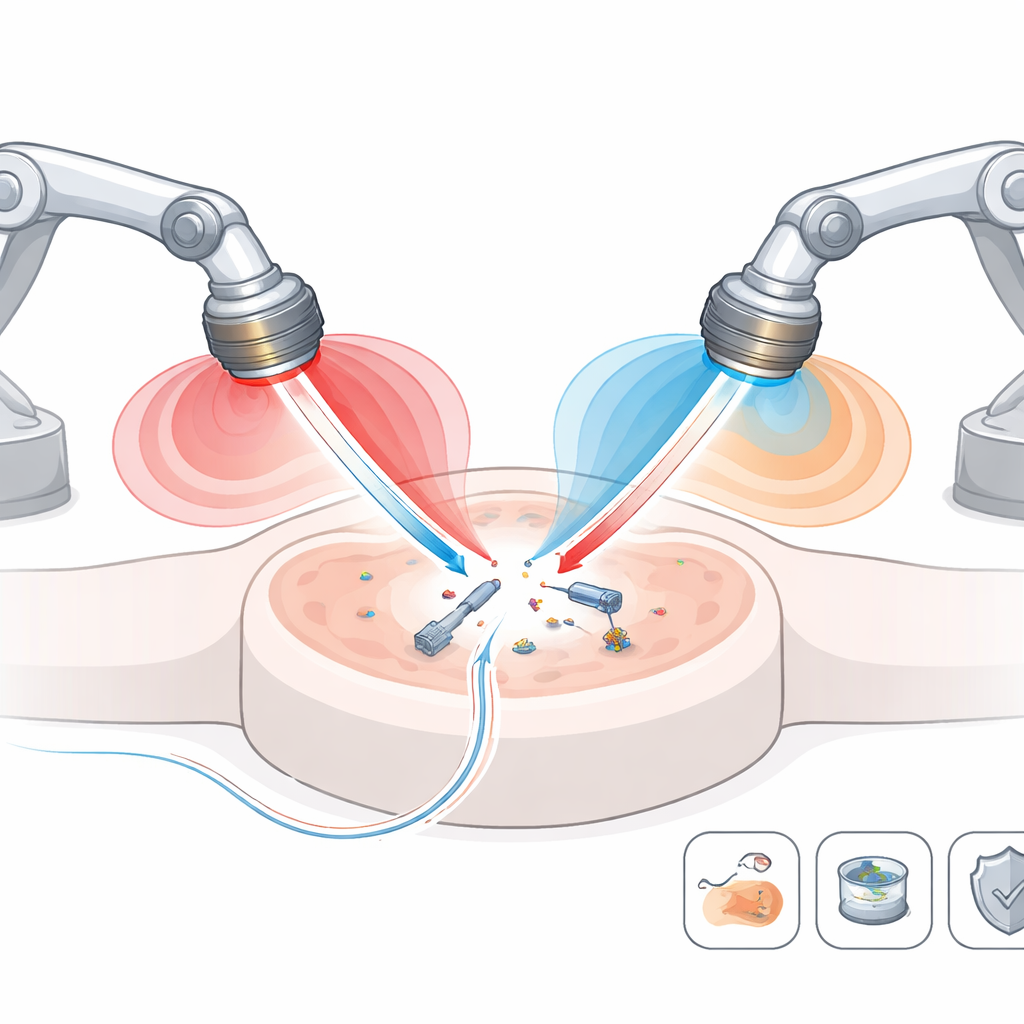
A New Kind of Magnetic Tool
Today’s systems for magnetic control in medicine often rely on bulky coils or large permanent magnets fixed around the patient. These can be powerful but hard to move, and they are not always ideal for reaching tight spots deep in the body. The team introduces a different approach: a “tunable magnetic end effector,” or TME, that mounts on the tip of a standard robotic arm. Inside its compact housing are several permanent magnets arranged so that, by rotating internal parts, their fields can either add up to produce a strong pull (the ON state) or largely cancel one another (the OFF state). This allows the robot to change the strength and direction of the magnetic field without constantly swinging a large magnet around the patient.
Shaping the Magnetic Sweet Spot
To understand and control what this tool can do, the researchers performed detailed measurements of the magnetic field the TME creates in three‑dimensional space. They varied its position, the angle of the whole tool, and the rotation of an internal motor, then used sensors to map how the field strength and direction changed. They showed that one set of settings mainly changes how strong the field is, while another set mostly rotates its direction, like turning a compass needle without changing how hard it pulls. Within a cube of space a few centimeters wide, the TME can smoothly tune fields from nearly zero up to about 12 millitesla and create sharp gradients—changes in field strength across small distances—that are essential for pushing and pulling tiny devices.
Two Tools Are Better Than One
While a single TME can control magnetic objects in one region, the real power comes from using two together. By putting two TMEs on separate robotic arms and adjusting how they face and where they sit, the team can create different magnetic “zones” in the same workspace. In one area, the field may point one way; nearby, it may point another or almost cancel out entirely. This makes it possible, for example, to attract a tiny carrier with one tool, then hand off control to the second by quietly switching the first to its OFF state. The combined system can even create a special point where the field nearly vanishes, which is useful for some imaging and tracking techniques. 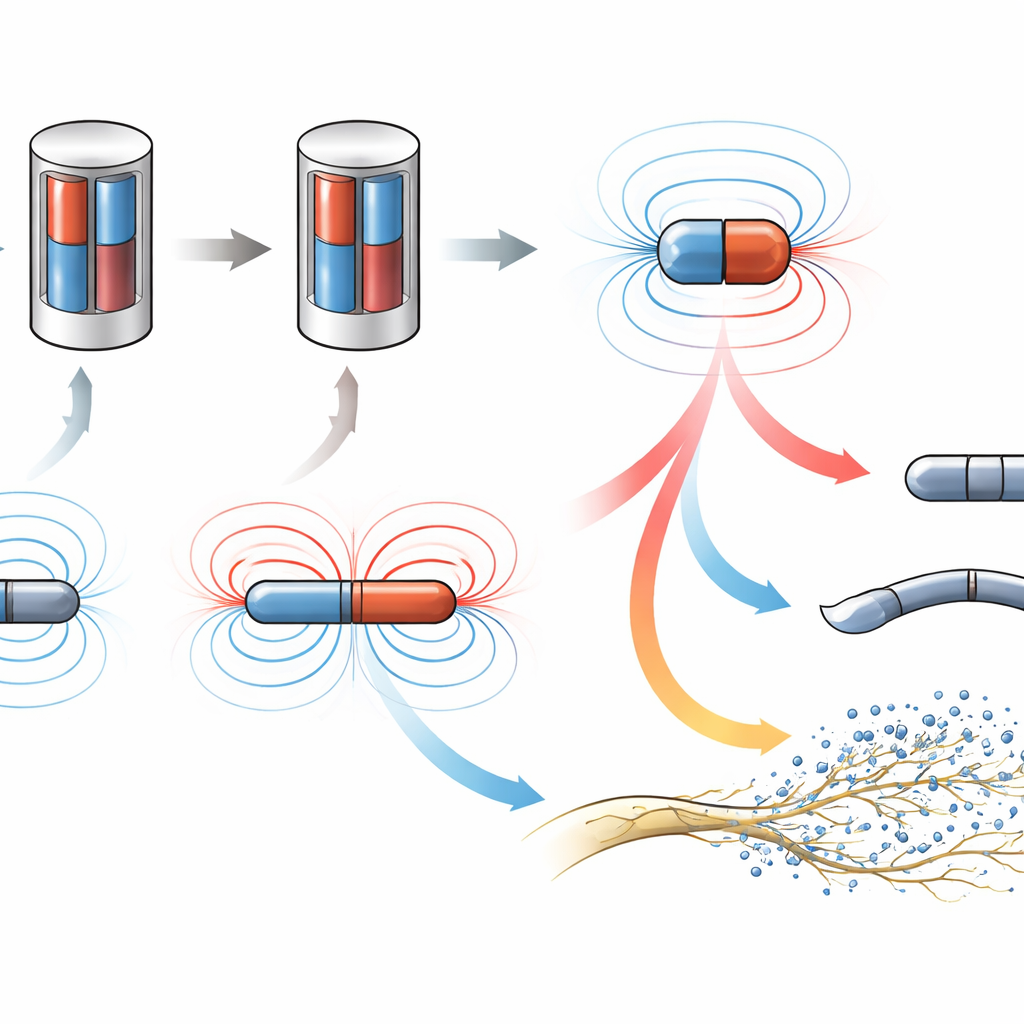
Teaching the Robot to Aim the Field
Because the relationship between the tool’s settings and the resulting magnetic field is complex, the researchers trained an artificial neural network to help. They collected a large data set—120,000 different combinations of positions and angles—and used it to teach the network how to predict which settings will produce a desired field strength and direction at a particular spot. Once trained, this data‑driven model can work in reverse: a user specifies the magnetic field they want, and the network suggests how the robot arms and internal motors should move. Tests showed that the network’s predictions were close to reality, with only a few percent error in field strength and orientation.
Demonstrations with Tiny Robots and Swarms
To prove that the system can do more than just draw pretty field maps, the team tested it on three kinds of miniature agents. First, they steered a millimeter‑scale magnetic “carrier” along branching paths, adjusting field strength to change its speed and switching between the two TMEs to redirect it at junctions. Second, they used the fields to bend soft, magnetically responsive filaments that resemble flexible medical probes, exploring how the path of the magnet and its ON/OFF timing change the final shape. Finally, they guided swarms of magnetic nanoparticles through fluid channels, using subtle field changes to select which branch the swarm would follow while keeping its average speed almost constant. In each case, the neural network helped compute the field settings needed to achieve the desired motion.
What This Means for Future Medicine
In plain terms, this work shows how to build a compact magnetic “remote control” for devices too small to touch directly. By combining tunable permanent magnets with smart software, the system delivers precise, reconfigurable magnetic fields without large coils or heavy, constantly moving magnets. Although the experiments were done in laboratory setups, the same principles could be applied to guide tiny robots for targeted drug delivery, minimally invasive surgery, or advanced imaging inside the body. With further development and real‑time sensing, such dual robotic magnetic tools could one day let doctors reach and treat areas that are currently difficult or impossible to access safely.
Citation: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
Keywords: magnetic microrobots, minimally invasive surgery, robotic end effector, nanoparticle swarms, magnetic field control