Clear Sky Science · es
Control del campo magnético con dos efector(es) final(es) magnético(s) robóticos y sintonizables
Guiar diminutos robots médicos con manos invisibles
Imagínese manejar un robot del tamaño de un grano a través de vasos sanguíneos para administrar un fármaco exactamente donde se necesita, o doblar con delicadeza una sonda del grosor de un cabello para inspeccionar el interior del cuerpo. Este artículo presenta una nueva forma de hacer precisamente eso, usando campos magnéticos cuidadosamente moldeados en lugar de contacto directo. Los investigadores han construido una herramienta robótica compacta que puede activar y desactivar el magnetismo de forma eficaz y orientarlo en distintas direcciones, abriendo la puerta a procedimientos médicos dentro del cuerpo humano más seguros y precisos. 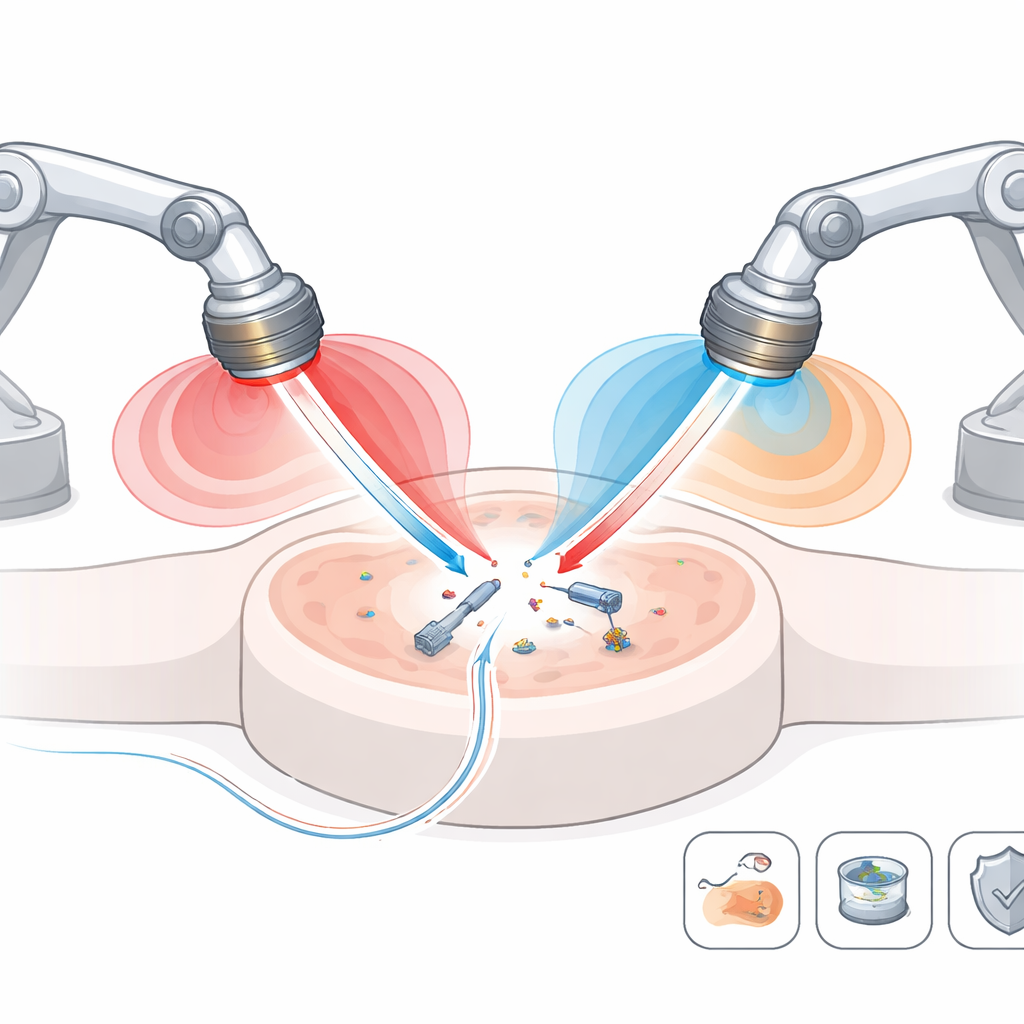
Un nuevo tipo de herramienta magnética
Los sistemas actuales de control magnético en medicina suelen depender de bobinas voluminosas o de grandes imanes permanentes colocados alrededor del paciente. Estos pueden ser potentes pero difíciles de mover, y no siempre son ideales para alcanzar espacios estrechos y profundos del cuerpo. El equipo presenta un enfoque diferente: un “efector final magnético sintonizable”, o TME, que se monta en la punta de un brazo robótico estándar. En su carcasa compacta hay varios imanes permanentes dispuestos de modo que, al rotar piezas internas, sus campos pueden sumarse para producir un gran tirón (el estado ENCENDIDO) o cancelarse en gran medida (el estado APAGADO). Esto permite al robot cambiar la intensidad y la dirección del campo magnético sin tener que mover continuamente un imán grande alrededor del paciente.
Conformando la «zona dulce» magnética
Para entender y controlar lo que esta herramienta puede hacer, los investigadores realizaron mediciones detalladas del campo magnético que el TME genera en el espacio tridimensional. Variaron su posición, el ángulo de toda la herramienta y la rotación de un motor interno, y luego usaron sensores para mapear cómo cambiaban la intensidad y la dirección del campo. Demostraron que un conjunto de ajustes cambia principalmente la intensidad del campo, mientras que otro conjunto rota mayormente su dirección, como girar la aguja de una brújula sin alterar cuánto fuerza ejerce. Dentro de un cubo de espacio de unos pocos centímetros de lado, el TME puede sintonizar suavemente campos desde casi cero hasta alrededor de 12 militesla y crear gradientes pronunciados —cambios en la intensidad del campo a lo largo de distancias pequeñas— que son esenciales para empujar y tirar de dispositivos diminutos.
Dos herramientas valen más que una
Mientras que un único TME puede controlar objetos magnéticos en una región, el verdadero poder surge al usar dos juntos. Al colocar dos TMEs en brazos robóticos separados y ajustar cómo se orientan y dónde se sitúan, el equipo puede crear distintas “zonas” magnéticas en el mismo espacio de trabajo. En un área, el campo puede apuntar en una dirección; en otra vecina, puede apuntar en otra o casi cancelarse por completo. Esto permite, por ejemplo, atraer un pequeño portador con una herramienta y luego ceder el control al segundo al cambiar silenciosamente la primera a su estado APAGADO. El sistema combinado puede incluso crear un punto especial donde el campo prácticamente desaparece, lo cual es útil para algunas técnicas de imagen y seguimiento. 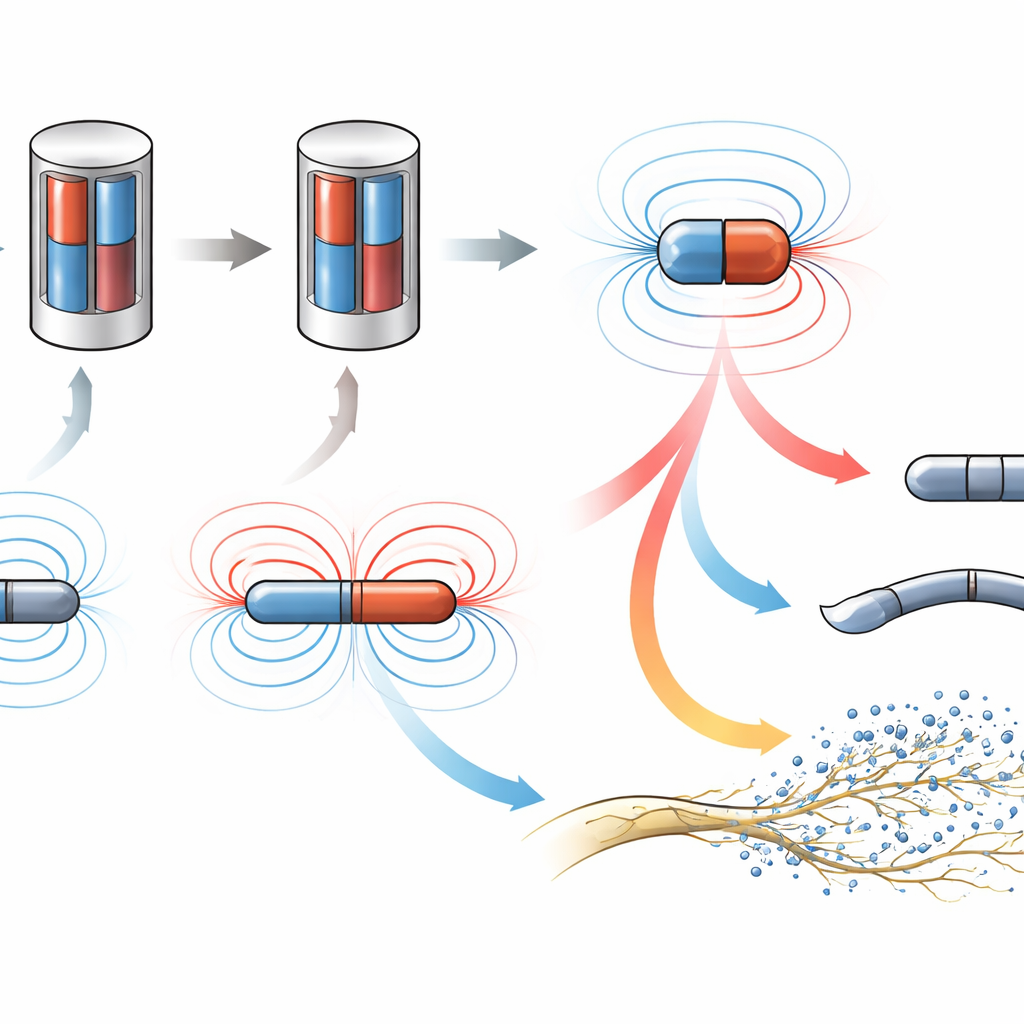
Enseñar al robot a apuntar el campo
Debido a que la relación entre los ajustes de la herramienta y el campo magnético resultante es compleja, los investigadores entrenaron una red neuronal artificial para ayudar. Recopilaron un gran conjunto de datos —120.000 combinaciones diferentes de posiciones y ángulos— y lo usaron para enseñar a la red a predecir qué ajustes producirán una intensidad y dirección de campo deseadas en un punto particular. Una vez entrenado, este modelo basado en datos puede trabajar en sentido inverso: el usuario especifica el campo magnético que quiere y la red sugiere cómo deben moverse los brazos del robot y los motores internos. Las pruebas mostraron que las predicciones de la red se aproximaban a la realidad, con solo unos pocos por ciento de error en intensidad y orientación del campo.
Demostraciones con diminutos robots y enjambres
Para demostrar que el sistema puede hacer más que trazar mapas de campo bonitos, el equipo lo probó con tres tipos de agentes en miniatura. Primero, guiaron un “portador” magnético a escala milimétrica a lo largo de caminos ramificados, ajustando la intensidad del campo para cambiar su velocidad y alternando entre los dos TMEs para redirigirlo en las bifurcaciones. Segundo, usaron los campos para doblar filamentos blandos y magnetorreceptivos que se asemejan a sondas médicas flexibles, explorando cómo la trayectoria del imán y el tiempo de ENCENDIDO/APAGADO cambian la forma final. Por último, guiaron enjambres de nanopartículas magnéticas por canales fluidos, usando cambios sutiles en el campo para seleccionar qué rama seguiría el enjambre mientras mantenían su velocidad media casi constante. En cada caso, la red neuronal ayudó a calcular los ajustes de campo necesarios para lograr el movimiento deseado.
Qué significa esto para la medicina futura
En términos sencillos, este trabajo muestra cómo construir un “control remoto” magnético compacto para dispositivos demasiado pequeños para tocarlos directamente. Al combinar imanes permanentes sintonizables con software inteligente, el sistema ofrece campos magnéticos precisos y reconfigurables sin bobinas grandes ni imanes pesados en movimiento continuo. Aunque los experimentos se realizaron en configuraciones de laboratorio, los mismos principios podrían aplicarse para guiar diminutos robots en administración dirigida de fármacos, cirugía mínimamente invasiva o imagen avanzada dentro del cuerpo. Con mayor desarrollo y sensado en tiempo real, tales herramientas magnéticas robóticas duales podrían algún día permitir a los médicos alcanzar y tratar áreas que hoy son difíciles o imposibles de acceder de forma segura.
Cita: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
Palabras clave: microrobots magnéticos, cirugía mínimamente invasiva, efector final robótico, enjambres de nanopartículas, control de campo magnético