Clear Sky Science · ja
二重ロボット可変磁気エンドエフェクタによる磁場制御
見えない手で小さな医療ロボットを導く
粒子大のロボットを血管内で操り、薬を必要な場所へ正確に届けることや、毛髪ほど細いプローブをやさしく曲げて体内を検査することを想像してみてください。本論文は、直接接触するのではなく、精密に形作った磁場を用いてまさにそれを実現する新しい方法を示します。研究者たちは、磁力を効果的にオン・オフし、さまざまな方向に向けられるコンパクトなロボットツールを構築しました。これにより、人体内部でより安全かつ精密な処置を行う道が開かれます。 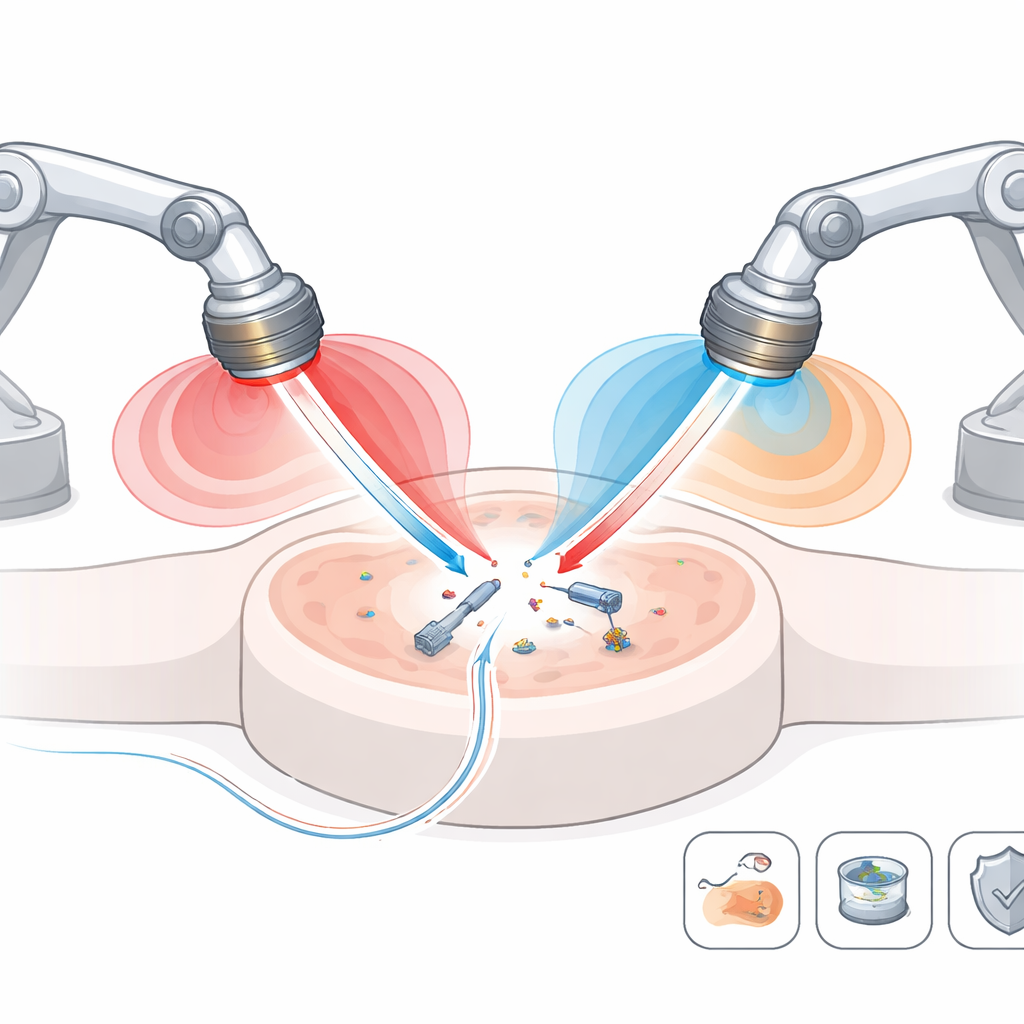
新しいタイプの磁気ツール
現在の医療用磁気制御システムは、患者の周囲に配置された大型コイルや大きな永久磁石に頼ることが多くあります。これらは強力ですが移動が難しく、体の深い狭所に届きにくい場合があります。チームは別のアプローチ、すなわち標準的なロボットアーム先端に取り付ける「可変磁気エンドエフェクタ(TME)」を提案します。コンパクトな筐体内には複数の永久磁石が配置されており、内部部品を回転させることで磁場が相乗して強い引力を生む(ON状態)か、互いに打ち消し合ってほとんど無効化する(OFF状態)かを切り替えられます。これにより、大きな磁石を患者の周りで常に回転させることなく、磁場の強さと方向を変えられます。
磁場の“スイートスポット”を形作る
このツールの動作を理解し制御するために、研究者たちはTMEが三次元空間に作り出す磁場を詳細に測定しました。位置、ツール全体の角度、内部モータの回転を変え、センサーで磁場の強さと方向がどう変化するかをマッピングしました。一連の設定は主に磁場の強さを変え、別の設定は方向を回転させる――つまり引力の強さを変えずにコンパス針の向きを変えるように振る舞うことを示しました。数センチ四方の立方体内では、TMEはほぼゼロから約12ミリテスラまで滑らかに磁場を調節でき、微小な距離での磁場強度の変化(勾配)をシャープに作り出せます。これらの勾配は微小デバイスを押したり引いたりするのに不可欠です。
二台あれば一台よりも強い
単一のTMEでも一領域内の磁性体を制御できますが、真価は二台を併用することで発揮されます。別々のロボットアームに二つのTMEを取り付け、それぞれの向きや位置を調整することで、同一作業空間内に異なる磁気“ゾーン”を作り出せます。ある領域では磁場が一方向を向き、近接した別の領域では異なる向きになったりほとんど打ち消されたりします。例えば、あるツールで微小なキャリアを引き寄せ、静かにそのツールをOFFに切り替えて制御を二つ目に引き継ぐことが可能です。複合システムは磁場がほとんど消失する特別な点を作ることさえでき、これは一部のイメージングや追跡技術で有用です。 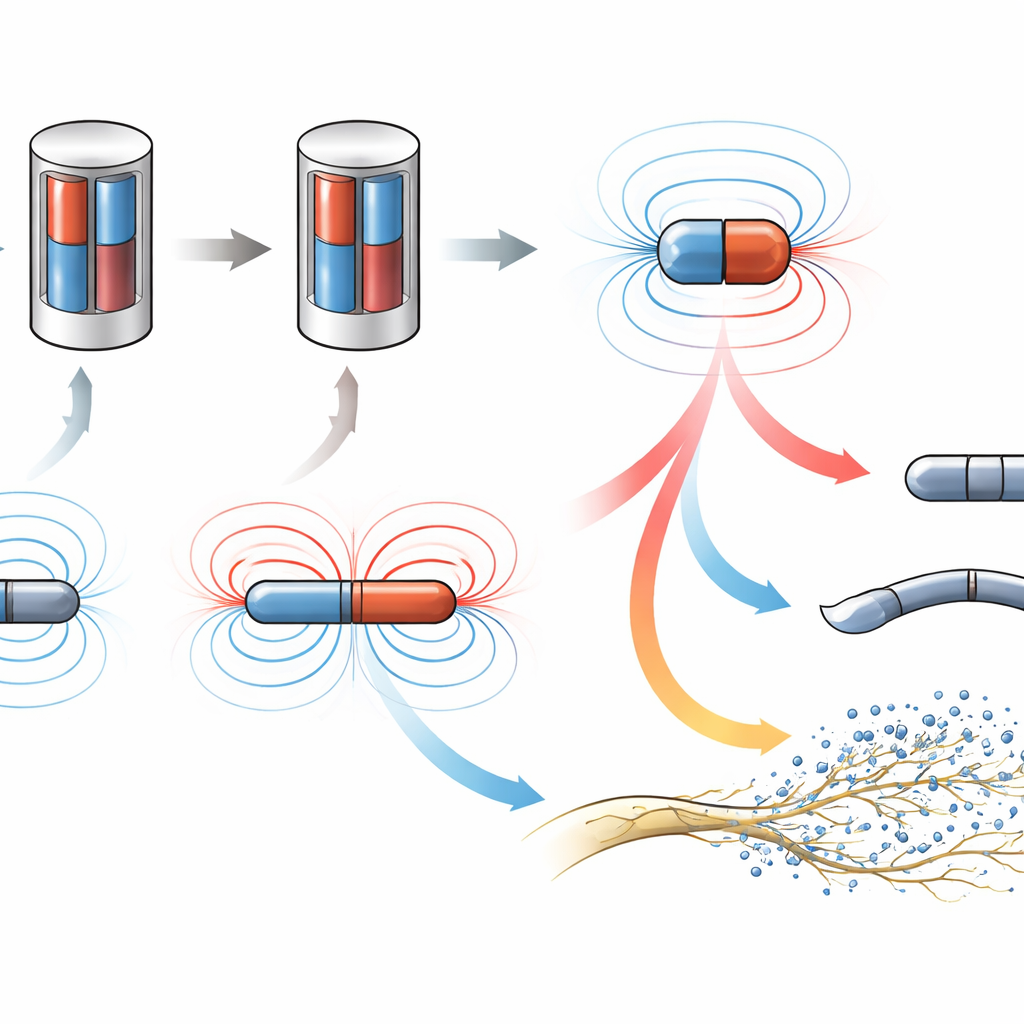
ロボットに磁場の狙いを教える
ツールの設定と得られる磁場との関係は複雑なため、研究者たちは人工ニューラルネットワークを訓練して支援させました。位置と角度の組み合わせ120,000通りという大規模なデータセットを収集し、特定の地点で望ましい磁場強度と方向を得るためにどの設定が必要かをネットワークに学習させました。訓練後、このデータ駆動モデルは逆に機能します:ユーザーが望む磁場を指定すると、ネットワークがロボットアームや内部モータの動かし方を提案します。試験では、ネットワークの予測は実測に近く、磁場強度と向きの誤差は数パーセント程度に留まりました。
微小ロボットと群れでの実証
単に磁場マップを描くだけでなくシステムが実際の作業に使えることを示すため、チームは三種類の小型エージェントで試験を行いました。まず、ミリメートルスケールの磁性“キャリア”を分岐路に沿って操縦し、磁場強度を調整して速度を変え、二つのTMEを切り替えて分岐点で進路を変えました。次に、柔らかく磁気応答性を持つフィラメント(可撓性医療プローブに類似)を磁場で曲げ、磁石の通り道とON/OFFのタイミングが最終形状にどう影響するかを探りました。最後に、磁性ナノ粒子の群れを流路内で誘導し、微妙な磁場変化で群れがどの分岐をたどるかを選択しつつ、平均速度はほぼ一定に保ちました。各ケースで、ニューラルネットワークが望む動作を達成するための磁場設定を計算するのに役立ちました。
将来の医療にとっての意義
平たく言えば、この研究は触れてはならないほど小さなデバイスのためのコンパクトな磁気“リモコン”の作り方を示しています。可変永久磁石と賢いソフトウェアを組み合わせることで、大型コイルや重くて常時動かす必要のある磁石がなくても、精密で再構成可能な磁場を提供できます。実験は試験室環境で行われましたが、同じ原理は薬物の局所送達、低侵襲手術、体内での高度なイメージングなどのために微小ロボットを誘導する応用に拡張可能です。さらなる開発とリアルタイムセンシングが進めば、このような二重ロボット磁気ツールは、現在では安全に到達・治療することが難しい領域へ医師が到達し治療することを可能にする日が来るかもしれません。
引用: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
キーワード: 磁気マイクロロボット, 低侵襲手術, ロボット用エンドエフェクタ, ナノ粒子群, 磁場制御