Clear Sky Science · pt
Controle do campo magnético com efetores de extremidade magnéticos ajustáveis robóticos duplos
Guiando pequeninos robôs médicos com mãos invisíveis
Imagine conduzir um robô do tamanho de um grão por vasos sanguíneos para entregar um medicamento exatamente onde ele é necessário, ou dobrar gentilmente uma sonda tão fina quanto um fio de cabelo para inspecionar o interior do corpo. Este artigo apresenta uma nova forma de fazer exatamente isso, usando campos magnéticos cuidadosamente moldados em vez de contato direto. Os pesquisadores construíram uma ferramenta robótica compacta que pode ligar e desligar o magnetismo de forma eficaz e apontá‑lo em direções diferentes, abrindo caminho para procedimentos médicos dentro do corpo humano mais seguros e precisos. 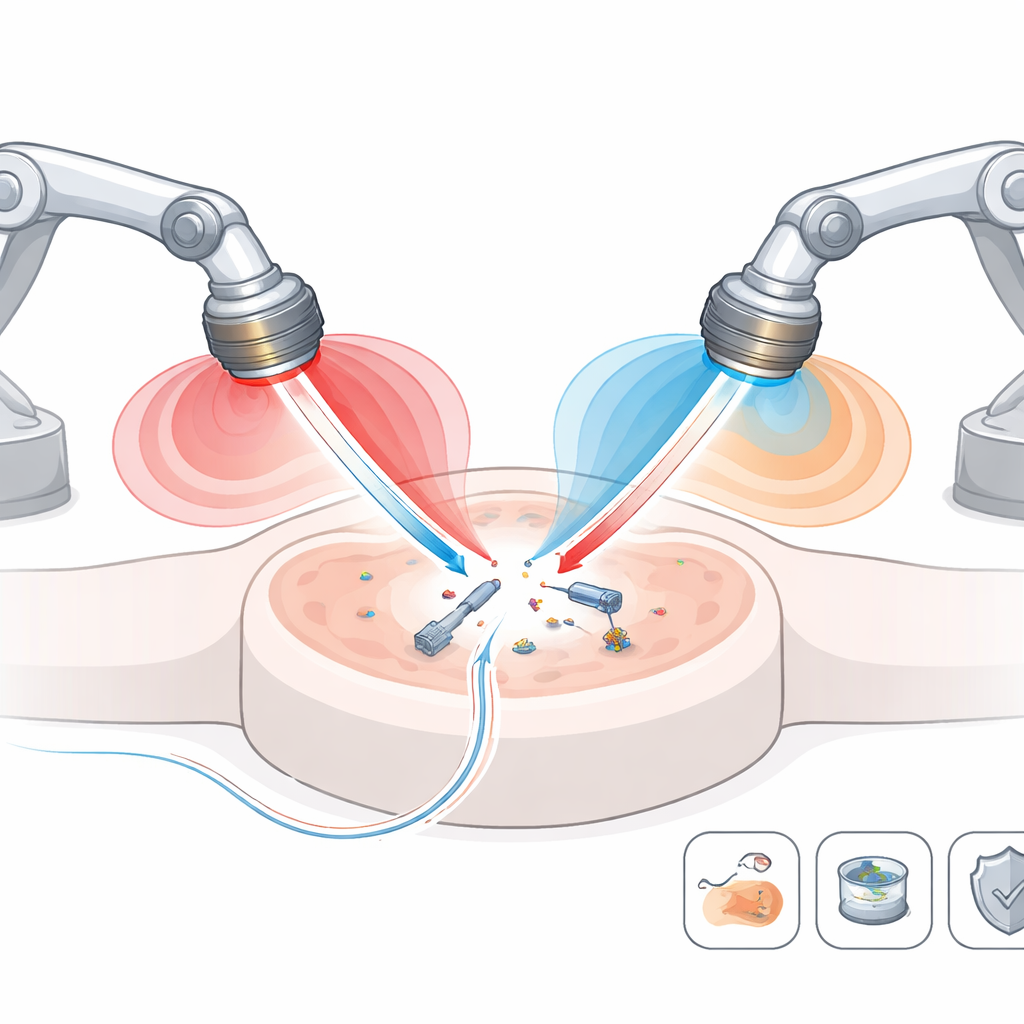
Um novo tipo de ferramenta magnética
Os sistemas atuais de controle magnético em medicina frequentemente dependem de bobinas volumosas ou grandes ímãs permanentes fixados ao redor do paciente. Estes podem ser potentes, mas difíceis de mover, e nem sempre são ideais para alcançar pontos estreitos e profundos no corpo. A equipe introduz uma abordagem diferente: um “efetor de extremidade magnética ajustável”, ou TME, que se monta na ponta de um braço robótico padrão. Em sua carcaça compacta há vários ímãs permanentes dispostos de modo que, ao girar partes internas, seus campos podem tanto se somar para produzir um puxão forte (o estado LIGADO) quanto em grande parte se cancelar (o estado DESLIGADO). Isso permite que o robô altere a intensidade e a direção do campo magnético sem precisar movimentar constantemente um grande ímã ao redor do paciente.
Moldando o ponto ideal magnético
Para entender e controlar o que essa ferramenta pode fazer, os pesquisadores realizaram medições detalhadas do campo magnético que o TME cria em espaço tridimensional. Eles variaram sua posição, o ângulo de todo o equipamento e a rotação de um motor interno, então usaram sensores para mapear como a intensidade e a direção do campo mudavam. Demonstraram que um conjunto de configurações muda principalmente a intensidade do campo, enquanto outro conjunto gira sobretudo sua direção, como girar uma agulha de bússola sem alterar quão forte ela puxa. Dentro de um cubo de espaço com alguns centímetros de lado, o TME pode ajustar suavemente campos de quase zero até cerca de 12 militesla e criar gradientes acentuados — mudanças na intensidade do campo sobre pequenas distâncias — que são essenciais para empurrar e puxar dispositivos minúsculos.
Dois dispositivos são melhores do que um
Enquanto um único TME pode controlar objetos magnéticos em uma região, o verdadeiro poder vem do uso de dois em conjunto. Ao colocar dois TMEs em braços robóticos separados e ajustar como eles se orientam e onde ficam, a equipe consegue criar diferentes “zonas” magnéticas no mesmo espaço de trabalho. Em uma área, o campo pode apontar de um jeito; nas proximidades, pode apontar de outro ou quase se cancelar completamente. Isso torna possível, por exemplo, atrair um pequeno transportador com uma ferramenta e então passar o controle para a segunda trocando silenciosamente a primeira para o estado DESLIGADO. O sistema combinado pode até criar um ponto especial onde o campo praticamente desaparece, o que é útil para algumas técnicas de imagem e rastreamento. 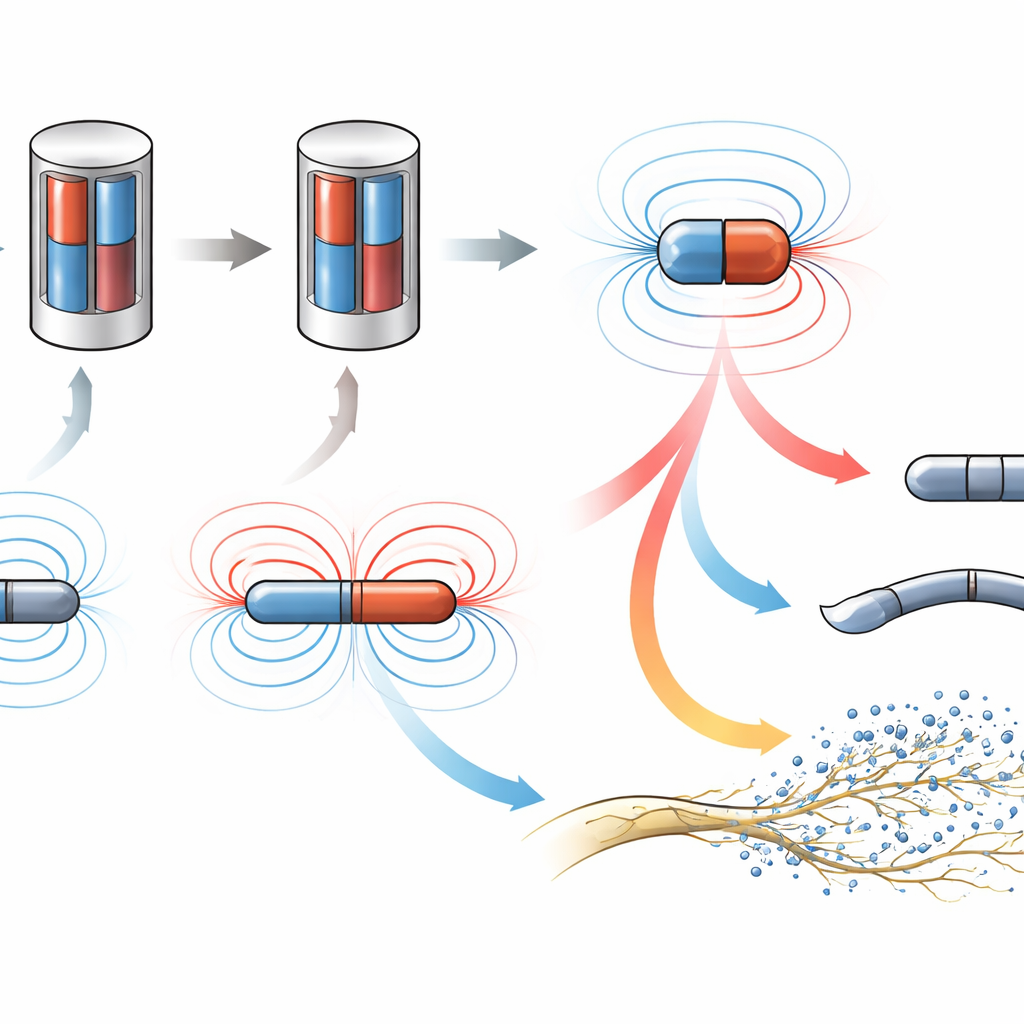
Ensinando o robô a apontar o campo
Como a relação entre as configurações da ferramenta e o campo magnético resultante é complexa, os pesquisadores treinaram uma rede neural artificial para ajudar. Eles coletaram um grande conjunto de dados — 120.000 combinações diferentes de posições e ângulos — e o usaram para ensinar a rede a prever quais configurações produzirão uma intensidade e direção de campo desejadas em um ponto específico. Uma vez treinado, esse modelo orientado por dados pode funcionar em reverso: o usuário especifica o campo magnético desejado e a rede sugere como os braços robóticos e os motores internos devem se mover. Testes mostraram que as previsões da rede ficaram próximas da realidade, com apenas alguns por cento de erro na intensidade e na orientação do campo.
Demonstrações com robôs minúsculos e enxames
Para provar que o sistema faz mais do que desenhar mapas de campo bonitos, a equipe testou em três tipos de agentes em miniatura. Primeiro, conduziram um “transportador” magnético em escala milimétrica ao longo de caminhos ramificados, ajustando a intensidade do campo para mudar sua velocidade e alternando entre os dois TMEs para redirecioná‑lo em junções. Em segundo lugar, usaram os campos para dobrar filamentos macios e magneticamente responsivos que se assemelham a sondas médicas flexíveis, explorando como o percurso do ímã e o tempo dos estados LIGADO/DESLIGADO alteram a forma final. Por fim, guiaram enxames de nanopartículas magnéticas através de canais fluidos, usando mudanças sutis no campo para selecionar qual ramo o enxame seguiria enquanto mantinham sua velocidade média quase constante. Em cada caso, a rede neural ajudou a calcular as configurações de campo necessárias para alcançar o movimento desejado.
O que isso significa para a medicina futura
Em termos simples, este trabalho mostra como construir um “controle remoto” magnético compacto para dispositivos pequenos demais para tocar diretamente. Combinando ímãs permanentes ajustáveis com software inteligente, o sistema fornece campos magnéticos precisos e reconfiguráveis sem grandes bobinas ou ímãs pesados em movimento constante. Embora os experimentos tenham sido realizados em ambientes de laboratório, os mesmos princípios poderiam ser aplicados para guiar robôs minúsculos para entrega direcionada de medicamentos, cirurgia minimamente invasiva ou imagem avançada dentro do corpo. Com desenvolvimento adicional e sensoriamento em tempo real, tais ferramentas magnéticas robóticas duplas podem, um dia, permitir que médicos alcancem e tratem áreas que hoje são difíceis ou impossíveis de acessar com segurança.
Citação: Abolfathi, K., Zhu, J., Chandler, J.H. et al. Magnetic field control with dual robotic tunable magnetic end effectors. Commun Eng 5, 68 (2026). https://doi.org/10.1038/s44172-026-00629-0
Palavras-chave: microrrobôs magnéticos, cirurgia minimamente invasiva, efetor final robótico, enxames de nanopartículas, controle de campo magnético