Clear Sky Science · zh
受分布式感测启发的外围控制:一种章鱼式软体机器人手臂实现自主水下抓取
为何柔性机械臂重要
想象一种机器人:它能在珊瑚礁间轻柔探查,拾起易碎的贝壳而不断裂,或在被淹的建筑中搜寻而不撞翻物品。要做到这些安全操作,机器需要既柔软的躯体,又在整个躯体上分布式的感觉系统,类似动物的设计。本研究展示了模仿章鱼手臂的触觉与反应方式,如何赋予水下机器人这种细腻的触感能力。
向章鱼学习
章鱼的触腕以优雅与灵巧著称。每条腕臂都布满数百个吸盘,内含触觉与化学感受器,而且大量决策在腕臂局部完成,而非全部由中心大脑处理。当吸盘感知到接触时,它可以在本地触发简单的反射,同时仍参与更大范围的协调运动。该团队旨在在可水下作业的机器人臂中重现这种柔软结构、丰富触觉与局部控制的混合方式。
构建带智能吸盘的软臂
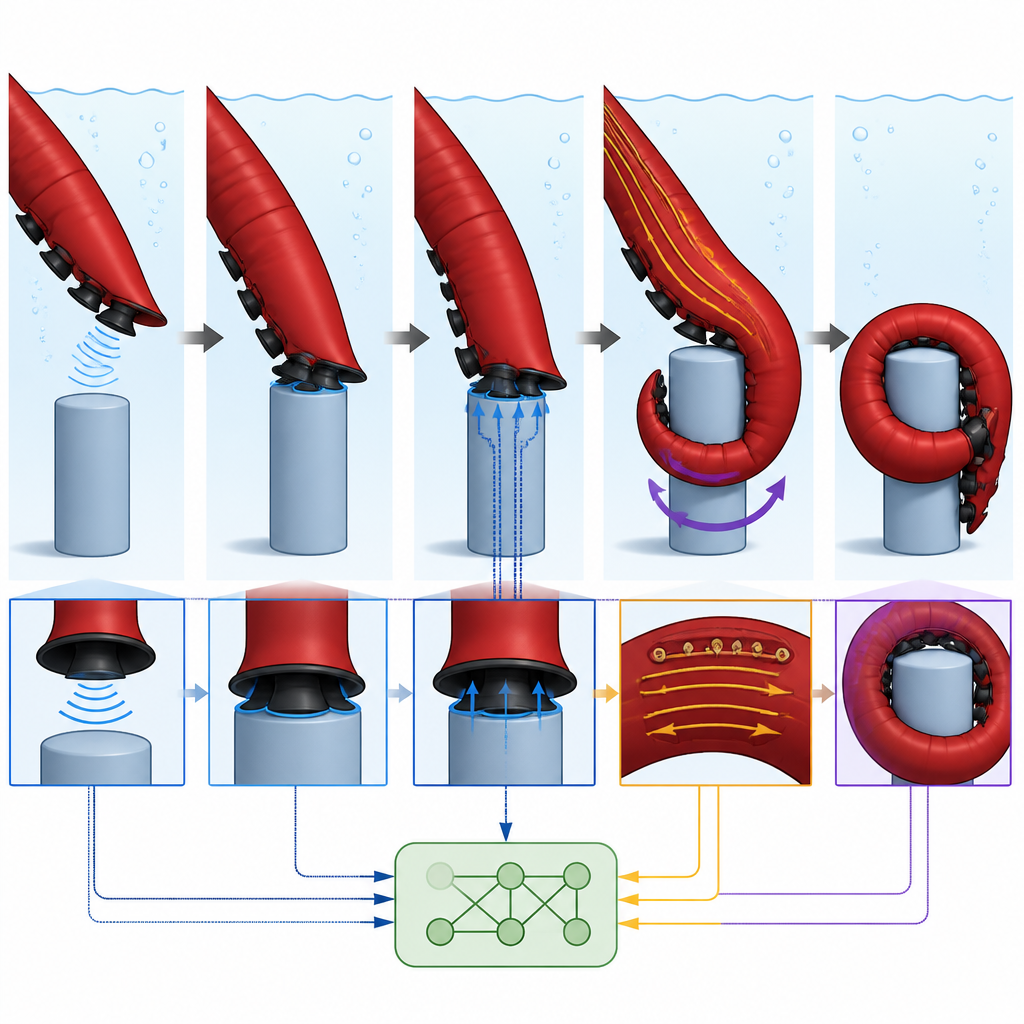
团队设计了一根锥形软臂,长约四十厘米,自粗基部逐渐变细至尖端,类似小型章鱼腕臂。在其下侧布置了十个人工吸盘,且朝尖端逐渐变小。每个吸盘内置一块微小电路板,电路板带有发光二极管与光传感器,封装在有色软硅胶体中。当硅胶在接触时发生变形,反射光的模式会改变。系统据此光学信号判断吸盘是否接触、接触力量大小,甚至感知接触方向。空中与水中的严密测试显示,吸盘在轻柔力范围内对力的响应近似线性,可在数千次循环中可靠工作,并能在小接触面积下将接触方向感知精确到数度范围。

让腕臂在边缘处做决定
为将触觉转化为智能运动,研究人员模拟了章鱼腕臂上分散的控制方式。每个吸盘配备自己的局部电子装置,类似微小的神经中枢:一旦信号超过设定阈值,该吸盘即可作为反射开启吸附,夹持邻近表面。与此同时,有关接触位置与方式的简化信息会被发送到扮演外围神经系统角色的更高层,这一层不接收所有传感器的原始数据,只接收每个吸盘关于接触方向的摘要。基于该综合信息,它选择宏观策略,例如朝向或远离躯干弯曲,或围绕物体扭转,然后指挥控制腕臂的三根内腱。
测试水下触觉与抓持
研究团队在静止的淡水水槽中对该臂进行了测试,使用简单的圆柱体、小盒子以及不规则形状(如玩具海星)。在一组试验中,臂保持静止,而物体以不同角度接触到臂。吸盘能正确报告接触位置,控制系统据此选择匹配动作,例如当物体横跨臂时扭转,或物体位于一侧时弯曲。在其他测试中,臂在水中缓慢摆动搜索,直到吸盘感知到接触,然后停下、推断物体姿态并将其包裹起来。同样的感测信号甚至可用于通过读取单个吸盘的拉力来估算悬挂物体的表观重量。在大量试验中,该臂在无外部监督下成功吸附并举起了若干类型的小型水下物体。
对未来水下机器人的意义
通过将软性材料、基于光的触觉传感器与分层的局部控制结合,这种章鱼启发的腕臂展示了机器人如何在接触发生的地点直接对周围环境作出反应,而不必等待远端计算机下达命令。这项工作表明,未来的水下机器可以通过在躯体上布置许多小型感测与反射单元,更安全地探索杂乱、脆弱或信息匮乏的空间。虽然该原型主要在相对简单的圆柱状目标上测试,但相同设计可扩展到更多腕臂与更多吸盘,使机器人更接近章鱼在海中自然流畅的动作。
引用: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
关键词: 软体机器人, 水下抓取, 章鱼启发设计, 触觉感测, 自主操控