Clear Sky Science · ar
التحكم المحيطي المدعوم بالاستشعار الموزع في ذراع روبوتية لينة مستوحاة من الأخطبوط للإمساك الذاتي تحت الماء
لماذا يهم وجود ذراع روبوتية مرنة
تخيل روبوتًا يستطيع استكشاف شعاب مرجانية برفق، ورفع صدفة هشة دون كسرها، أو البحث في مبنى مغمور دون تحريك الأشياء بعنف. لتحقيق ذلك بأمان، تحتاج الآلات إلى أجسام لينة وحواس موزعة في تلك الأجسام، تمامًا كما في الحيوانات. تُظهر هذه الدراسة كيف أن تقليد طريقة شعور ذراع الأخطبوط واستجابتها يمكن أن يمنح روبوتًا تحت الماء تلك اللمسة الدقيقة.
التعلم من الأخطبوط
تشتهر أذرع الأخطبوط برشاقتها وبراعتها. تحتوي كل ذراع على مئات من المصاصات المليئة بحساسات اللمس والكيمياء، ويجري جزء كبير من عملية اتخاذ القرار محليًا في الذراع بدلاً من دماغ الحيوان المركزي. عندما تشعر مصاصة بشيء ما، يمكنها أن تثير ردود فعل بسيطة في الموقع بينما تظل جزءًا من حركات أوسع ومنسقة. سعى الباحثون في هذا العمل إلى إعادة إنشاء ذلك المزيج من الهيكل اللين، واللمس الغني، والتحكم المحلي في ذراع روبوتية قادرة على العمل تحت الماء.
بناء ذراع لينة مع أكواب شفط ذكية
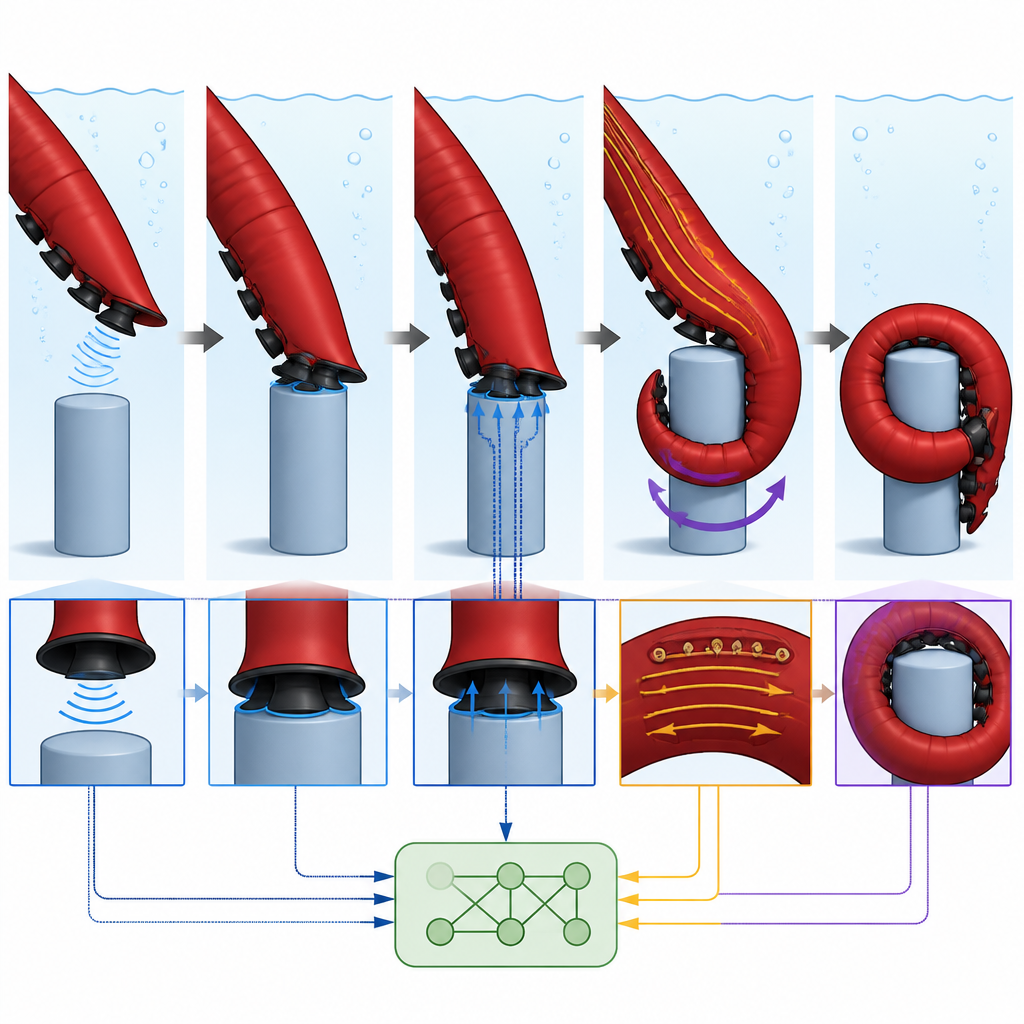
صمم الفريق ذراعًا لينة بشكل مخروط بطول حوالي أربعين سنتيمترًا، تتناقص في العرض من قاعدة سميكة إلى طرف نحيف، شبيهة بذراع أخطبوط صغير. على جانبه السفلي وضعوا عشرة أكواب شفط اصطناعية تتناقص في الحجم نحو الطرف. داخل كل كوب توجد لوحة إلكترونية صغيرة مع مصابيح ثنائية باعثة للضوء ومستشعرات ضوئية مضمَّنة في جسم سيليكوني ملون ولين. عندما يتشوه السيليكون أثناء التلامس، يتغير نمط الضوء المنعكس. من هذه الإشارات البصرية، يستطيع النظام معرفة ما إذا كان الكوب يلمس شيئًا، ومدى قوة الضغط، وحتى من أي اتجاه جاء التلامس. أظهرت اختبارات دقيقة في الهواء والماء أن الأكواب تستجيب خطيًا للقوة ضمن نطاقات لطيفة، وتعمل بشكل موثوق لآلاف الدورات، ويمكنها استشعار اتجاه التلامس بدقة ضمن عدة درجات للمناطق الصغيرة من التلامس.

دع الذراع يقرر عند الحافة
لتحويل هذا اللمس إلى حركة ذكية، قلد الباحثون طريقة انتشار التحكم على طول ذراع الأخطبوط. يمتلك كل كوب شفط إلكترونيات محلية تعمل كمركز عصبي صغير: بمجرد أن يتجاوز الإشارة عتبة محددة، يمكن لذلك الكوب تشغيل الشفط كاستجابة انعكاسية، ممسكًا السطح القريب. وفي الوقت نفسه، تُرسل معلومات مبسَّطة عن مكان وكيفية حدوث التلامس إلى طبقة أعلى تقوم بدور الجهاز العصبي المحيطي. هذه الطبقة لا ترى البيانات الخام من كل الحساسات بل فقط ملخصات لاتجاه التلامس من كل كوب. باستخدام تلك الصورة المجمعة، تختار استراتيجيات عامة مثل ثني الذراع نحو الجسم أو بعيدًا عنه أو الالتفاف حول جسم، ثم تصدر أوامر إلى الأوتار الثلاثة الداخلية التي توجه الذراع.
اختبار اللمس والإمساك تحت الماء
اختبر الباحثون الذراع في أحواض من ماء عذب ساكن، مستخدمين أسطوانات بسيطة وصناديق صغيرة وأشكال غير منتظمة مثل لعبة نجمة بحر. في مجموعة من التجارب، بقيت الذراع ثابتة بينما جُلبت الأجسام للتلامس من زوايا مختلفة. أبلغت أكواب الشفط بدقة عن مكان حدوث التلامس، واختار نظام التحكم حركات مطابقة، مثل الالتفاف عندما كان الجسم مستلقيًا عبر الذراع أو الانحناء عندما كان إلى جانبها. في اختبارات أخرى، كانت الذراع تمسح الماء ببطء بحركات بحثية حتى شعرت الأكواب بشيء، ثم توقفت، وحددت وضعية الجسم، ولفّت حوله. يمكن حتى استخدام إشارات الاستشعار نفسها لتقدير الوزن الظاهري لجسم معلق بقراءة قوى السحب على كوب شفط واحد. عبر تجارب عديدة، نجحت الذراع في التمسك ورفع عدة أنواع من الأجسام الصغيرة تحت الماء دون إشراف خارجي.
ماذا يعني هذا للروبوتات المائية المستقبلية
من خلال الجمع بين مواد لينة وحساسات لمسية ضوئية وتحكم محلي طبقي، يبيّن هذا الذراع المستوحى من الأخطبوط كيف يمكن للروبوتات أن تتفاعل مع محيطها مباشرة عند نقطة التلامس، بدلًا من انتظار قرار حاسوب بعيد. يقترح العمل أن الآلات المائية المستقبلية قد تستكشف المساحات المزدحمة والهشة أو غير المعروفة بأمان أكبر، باستخدام وحدات استشعار وردود فعل صغيرة متعددة موزعة على طول أجسامها. وعلى الرغم من أن هذا النموذج الأولي اختُبر أساسًا على أهداف متواضعة تشبه الأسطوانات، يمكن توسيع نفس التصميم وزيادته لذراعان أو أكثر ومزيد من الأكواب، لتقريب الروبوتات خطوة إلى قرب السيولة الطبيعية للأخطبوط في البحر.
الاستشهاد: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
الكلمات المفتاحية: الروبوتات اللينة, الإمساك تحت الماء, تصميم مستوحى من الأخطبوط, الاستشعار اللمسي, المناولة الذاتية