Clear Sky Science · ja
自律的な水中把持のための分散センシングによる末梢制御を備えたタコに着想を得たソフトロボットアーム
柔軟なロボットアームが重要な理由
サンゴ礁の周りをやさしく探りながら進み、壊れやすい貝殻を割らずにつかみ、あるいは浸水した建物の中を物を倒さずに捜索できるロボットを想像してください。そうした安全な動作には、動物のように柔らかい体とその体全体に広がった感覚が必要です。本研究は、タコの腕が物を感じて反応する仕組みを模倣することで、水中ロボットにそのような微妙な触覚を与えられることを示しています。
タコから学ぶ
タコの腕はその優雅さと器用さで知られています。各腕には多数の吸盤があり、触覚や化学感覚を備え、意思決定の多くが動物の中枢脳ではなく腕の局所で行われます。吸盤が何かを感じると、その場で単純な反射を引き起こしつつ、より大きな協調運動にも参加します。本研究のチームは、この柔らかい構造、豊かな触覚、局所制御の組み合わせを、水中で動作するロボットアームで再現することを目指しました。
スマート吸盤を備えたソフトアームの構築
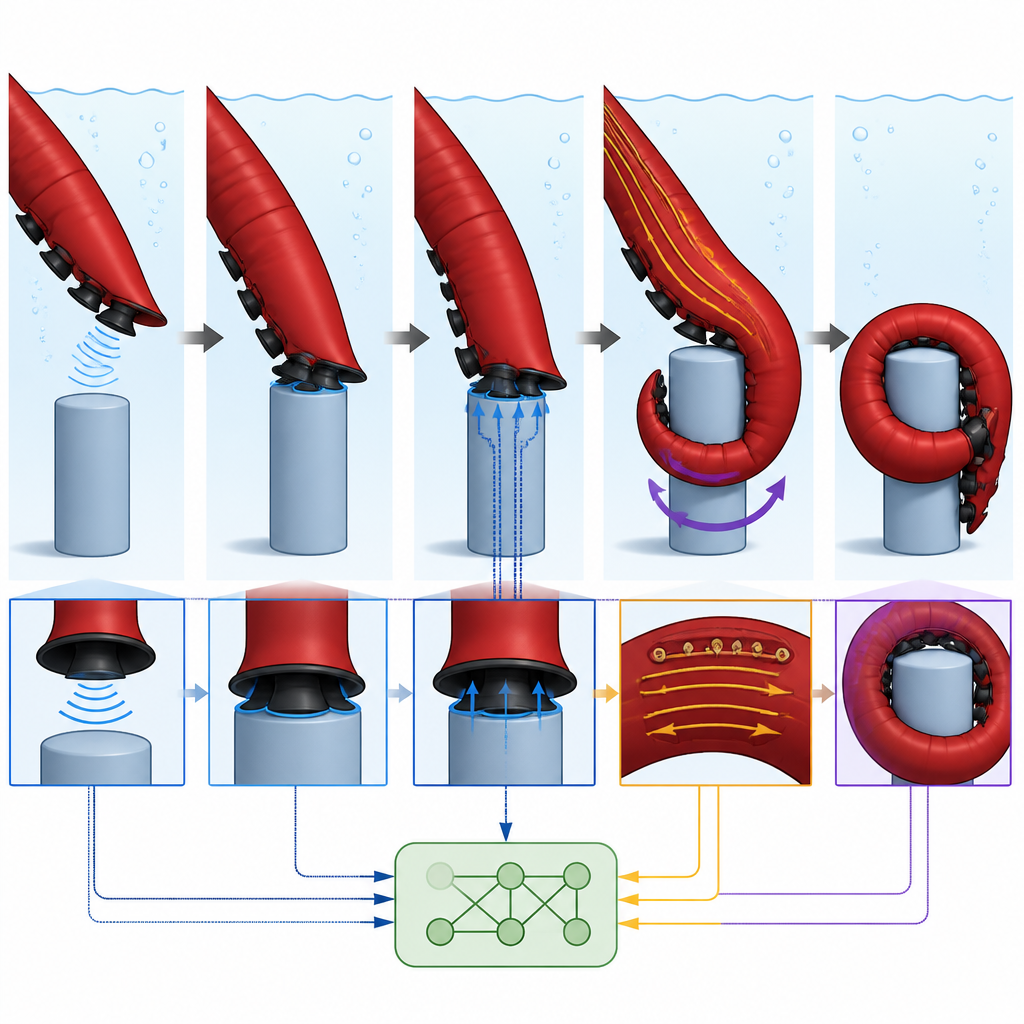
チームは長さ約40センチ、基部が太く先端へ向かって細くなる円錐状のソフトアームを設計しました。下側に沿って先端に向かって小さくなる人工吸盤を10個配置しています。各吸盤の内部には発光ダイオードと光センサーを備えた小さな電子基板が、着色した柔らかいシリコーンの体内に組み込まれています。接触時にシリコーンが変形すると反射光のパターンが変わります。これらの光学信号から、吸盤が何かに触れているか、どれくらいの力で押しているか、さらにはどの方向から接触が来ているかまで推定できます。空気中と水中での精密な試験により、吸盤は穏やかな力の範囲で力に対して線形に応答し、数千回のサイクルで安定して動作し、小さな接触領域でも接触方向を数度単位で検出できることが示されました。

末端でアーム自身に判断させる
この触覚をインテリジェントな動作に変えるために、研究者らはタコの腕に沿って制御が分散する仕組みを模倣しました。各吸盤は小さな神経中枢のように動作する局所電子系を持ち、ある閾値を超える信号が出ると、その吸盤は反射的に吸引を開始して近傍の表面を掴みます。同時に、接触がどこでどのように起きたかの簡略化された情報が末梢神経系の役割を果たす上位層に送られます。この上位層は全ての生データを見るのではなく、各吸盤からの接触方向の要約だけを受け取ります。統合された情報をもとに、体側へ向かって曲げる、離す、あるいは物体を囲むようにねじるといった大まかな戦略を選び、アームを操る三本の内部腱に指令を送ります。
水中での触覚と把持のテスト
研究者らは静かな淡水槽でこのアームを試験し、単純な円筒、小さな箱、そしておもちゃのヒトデのような不規則な形状を用いました。一連の試験では、アームを静止させた状態で物体をさまざまな角度から接触させました。吸盤は接触箇所を正確に報告し、制御システムは物体が腕に横たわっているときにねじる動作を、片側にあるときに曲げる動作を選ぶなど、適切な動きを選びました。別の試験では、アームが水中をゆっくりと掃引して捜索し、吸盤が何かを感じると停止して物体の姿勢を推定し、巻き付いて保持しました。同じ感知信号から、単一の吸盤にかかる引き力を読み取って吊り下げられた物体の見かけ上の重さを推定することもできました。多数の試行を通じて、外部の監督なしにいくつかの種類の小さな水中物体に吸着して持ち上げることに成功しました。
将来の水中ロボットにとっての意義
柔らかい材料、光学ベースの触覚センサー、層状の局所制御を組み合わせることで、このタコに着想を得たアームは、接触が起きたその場所で即座に周囲に反応できるロボットのあり方を示しています。これにより、将来の水中ロボットは多くの小さな感知・反射ユニットを体全体に広げて、散らかった場所や壊れやすい環境、不確かな空間をより安全に探索できる可能性が示唆されます。このプロトタイプは主に円筒状の穏やかな対象で試験されましたが、同じ設計はスケールアップやアームや吸盤の増設によって拡張でき、タコが海中で見せる自然な流動性にロボットを一歩近づけるでしょう。
引用: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
キーワード: ソフトロボティクス, 水中把持, タコに着想を得た設計, 触覚センシング, 自律操作