Clear Sky Science · pt
Controle periférico habilitado por sensoriamento distribuído em um braço robótico macio inspirado em polvo para apreensão subaquática autônoma
Por que um braço robótico flexível importa
Imagine um robô que possa sentir com delicadeza um recife de coral, pegar uma concha frágil sem quebrá‑la ou vasculhar um prédio alagado sem derrubar objetos. Para fazer isso com segurança, as máquinas precisam de corpos macios e de sentidos distribuídos por esses corpos, assim como nos animais. Este estudo mostra como copiar a forma como um braço de polvo sente e reage pode conferir a um robô subaquático esse tipo de tato sutil.
Aprendendo com um polvo
Os braços do polvo são famosos pela graça e destreza. Cada braço contém centenas de ventosas repletas de sensores táteis e químicos, e grande parte da tomada de decisão ocorre localmente no próprio braço em vez do cérebro central do animal. Quando uma ventosa sente algo, ela pode disparar reflexos simples no local ao mesmo tempo em que participa de movimentos maiores e coordenados. Os pesquisadores responsáveis por este trabalho buscaram recriar essa mistura de estrutura macia, tato rico e controle local em um braço robótico capaz de operar debaixo d’água.
Construindo um braço macio com ventosas inteligentes
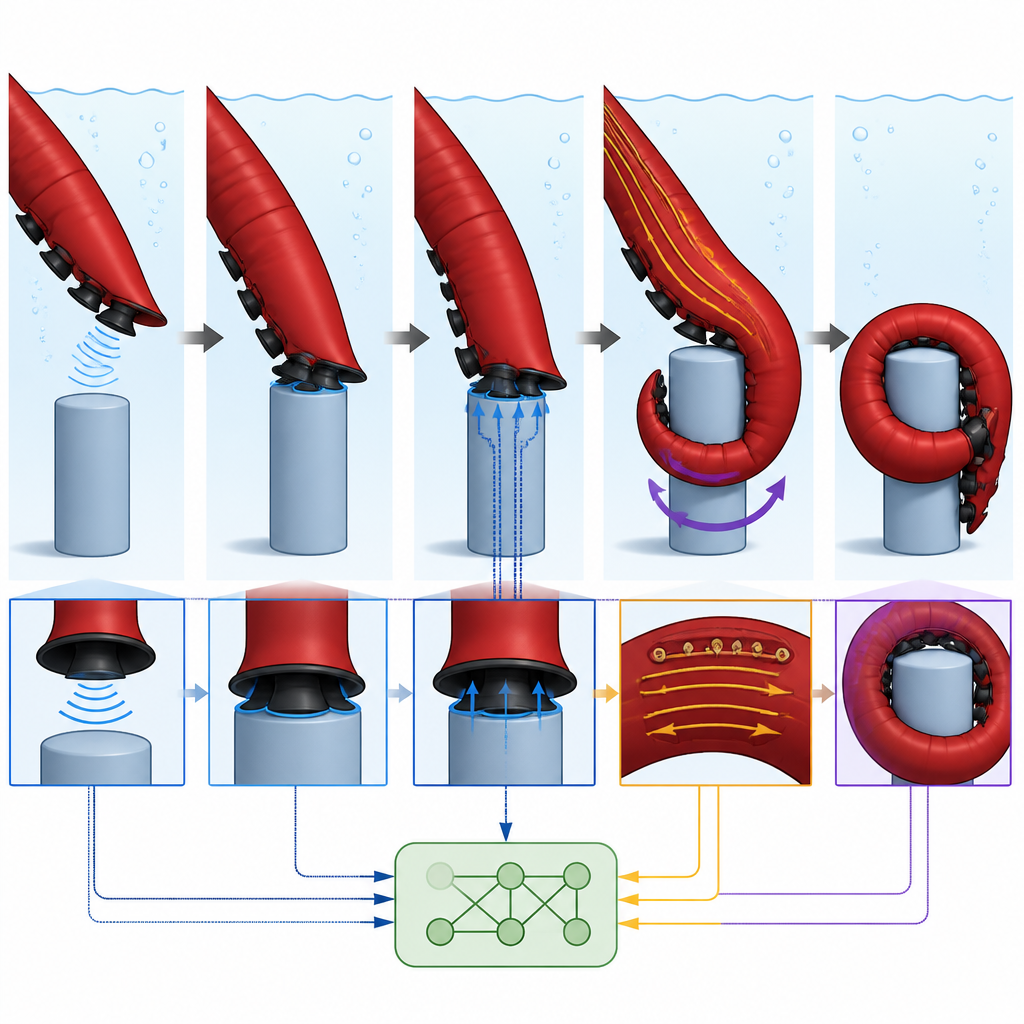
A equipe projetou um braço macio em forma de cone com cerca de quarenta centímetros de comprimento, afunilando de uma base espessa até uma ponta estreita, muito parecido com um braço de polvo pequeno. Ao longo da face inferior colocaram dez ventosas artificiais que diminuem de tamanho em direção à ponta. Dentro de cada ventosa fica uma pequena placa eletrônica com LEDs e sensores de luz incorporados em um corpo de silicone macio e colorido. Quando o silicone se deforma durante o contato, o padrão de luz refletida muda. A partir desses sinais ópticos, o sistema pode determinar se uma ventosa está tocando algo, quanta força está aplicando e até de que direção vem o contato. Testes cuidadosos no ar e na água mostraram que as ventosas respondem de forma linear à força em faixas suaves, funcionam de maneira confiável por milhares de ciclos e conseguem detectar a direção do contato com precisão de alguns graus para pequenas áreas de contato.

Deixando o braço decidir na ponta
Para transformar esse tato em movimento inteligente, os pesquisadores imitaram a forma como o controle é distribuído ao longo do braço de um polvo. Cada ventosa tem sua própria eletrônica local que atua como um pequeno centro nervoso: assim que um sinal ultrapassa um limiar definido, aquela ventosa pode ativar a sucção como um reflexo, agarrando a superfície próxima. Ao mesmo tempo, informações simplificadas sobre onde e como ocorreu o contato são enviadas a uma camada superior que funciona como um sistema nervoso periférico. Essa camada não vê os dados brutos de todos os sensores, apenas resumos da direção do contato de cada ventosa. Usando essa visão combinada, ela escolhe estratégias amplas, como dobrar o braço em direção ao corpo, afastar‑se ou enrolar em torno de um objeto, e então comanda os três tendões internos que orientam o braço.
Testando tato e apreensão subaquática
Os pesquisadores testaram o braço em tanques de água doce parada, usando cilindros simples, pequenas caixas e formas irregulares como uma estrela do mar de brinquedo. Em um conjunto de ensaios, o braço ficou parado enquanto objetos eram trazidos em contato por diferentes ângulos. As ventosas reportaram corretamente onde o contato ocorreu, e o sistema de controle escolheu movimentos correspondentes, como girar quando um objeto repousava sobre o braço ou dobrar quando estava lateralmente. Em outros testes, o braço varreu lentamente a água em movimentos de busca até que suas ventosas sentissem algo, então parou, estimou a postura do objeto e se enrolou ao redor dele. Os mesmos sinais de sensoriamento também puderam ser usados para estimar o peso aparente de um objeto suspenso lendo as forças de tração em uma única ventosa. Ao longo de muitos ensaios, o braço conseguiu prender e levantar vários tipos de pequenos objetos subaquáticos sem supervisão externa.
O que isso significa para futuros robôs subaquáticos
Ao combinar materiais macios, sensores táteis baseados em luz e controle local em camadas, este braço inspirado em polvo demonstra como robôs podem reagir ao ambiente exatamente no ponto de contato, em vez de esperar que um computador distante decida. O trabalho sugere que máquinas subaquáticas futuras poderiam explorar espaços clutterizados, frágeis ou pouco conhecidos com mais segurança, usando muitas pequenas unidades de sensoriamento e reflexo espalhadas pelos seus corpos. Embora este protótipo tenha sido testado principalmente em alvos modestos, parecidos com cilindros, o mesmo desenho pode ser escalado e estendido para mais braços e mais ventosas, aproximando os robôs da fluidez natural de um polvo no mar.
Citação: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
Palavras-chave: robótica macia, apreensão subaquática, design inspirado em polvo, sensoriamento tátil, manipulação autônoma