Clear Sky Science · ru
Периферийное управление, обеспеченное распределённой сенсорикой в мягкой роботизированной руке, вдохновлённой осьминогом, для автономного захвата под водой
Почему важна гибкая роботизированная рука
Представьте робота, который может аккуратно прощупывать риф, поднять хрупкую раковину, не сломав её, или обследовать затопленное здание, не опрокинув предметы. Для безопасной работы машинам нужны мягкие тела и сенсоры, распределённые по ним, как у животных. В этом исследовании показано, что копирование способов осязания и реакций руки осьминога может дать подводному роботу подобную тонкую чувствительность.
Учимся у осьминога
Руки осьминога знамениты своей грацией и ловкостью. В каждой руке сотни присосок, наполненных тактильными и химическими датчиками, и значительная часть принятия решений происходит локально в руке, а не в центральном мозге животного. Когда присоска чувствует что‑то, она может вызвать простые рефлексы на месте, оставаясь частью более крупных скоординированных движений. Исследователи в этой работе поставили задачу воссоздать такое сочетание мягкой конструкции, богатого осязания и локального управления в роботизированной руке, работающей под водой.
Создание мягкой руки с «умными» присосками
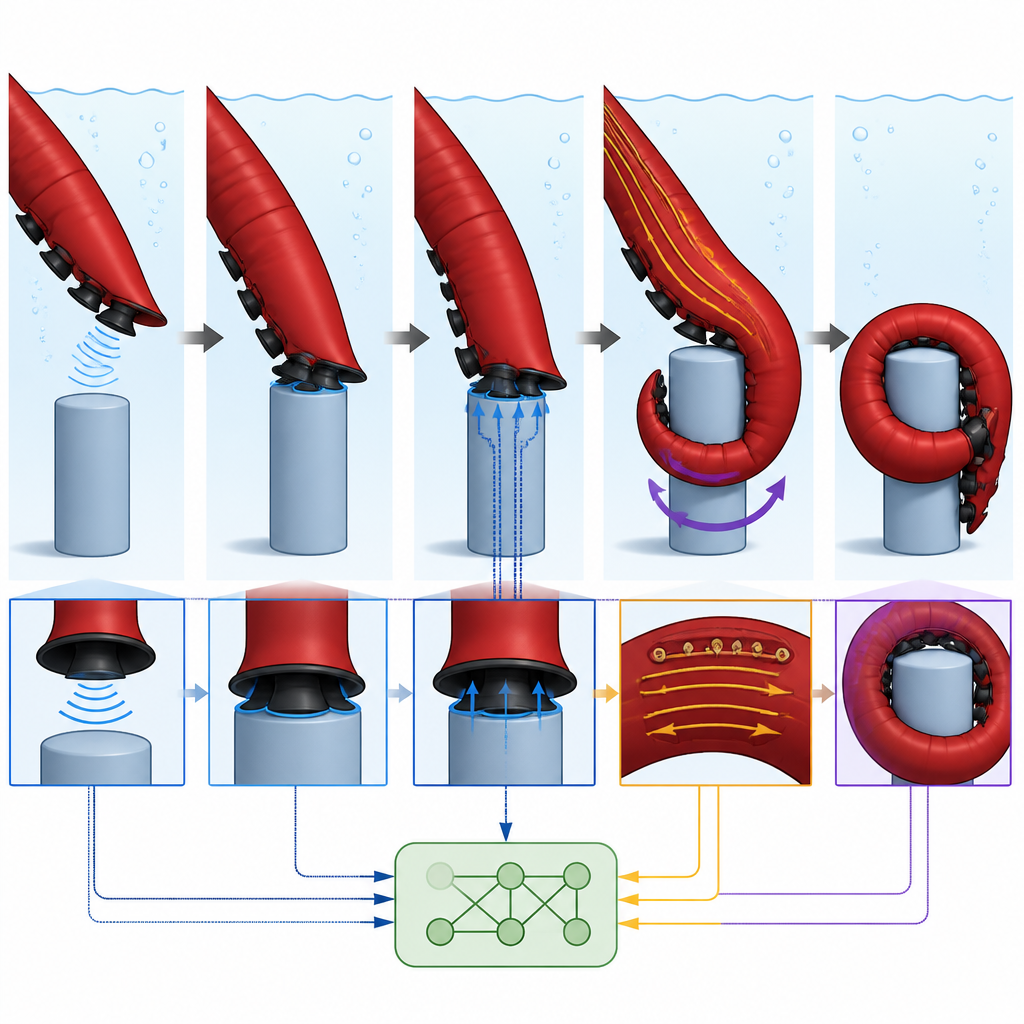
Команда разработала конусообразную мягкую руку длиной около сорока сантиметров, сужающуюся от широкого основания к узкому концу, подобно небольшой руке осьминога. По нижней стороне размещены десять искусственных присосок, уменьшающихся в размере к кончику. Внутри каждой присоски находится небольшая электронная плата с светодиодами и фотодатчиками, заключённая в мягкую окрашенную силиконовую оболочку. При деформации силикона во время контакта меняется рисунок отражённого света. По этим оптическим сигналам система определяет, касается ли присоска предмета, с какой силой она давит и даже из какого направления приходит контакт. Тщательные тесты в воздухе и воде показали, что присоски линейно реагируют на силы в пределах деликатных нагрузок, надёжно работают тысячи циклов и могут определять направление контакта с точностью до нескольких градусов для небольших площадей контакта.

Дать руке решать на периферии
Чтобы превратить это осязание в интеллектуальное движение, исследователи имитировали распределённый способ управления, присущий руке осьминога. Каждая присоска имеет собственную локальную электронику, действующую как крошечный нервный центр: как только сигнал превышает заданный порог, присоска может включить всасывание как рефлекс, схватив близлежащую поверхность. Одновременно упрощённая информация о том, где и как произошёл контакт, отправляется на верхний уровень, играющий роль периферической нервной системы. Этот уровень не получает сырые данные от всех сенсоров, а лишь сводные сведения о направлении контакта от каждой присоски. Используя эту объединённую картину, он выбирает широкие стратегии — например, сгибать руку к туловищу или от него, или обвивать объект — затем отдаёт команды трём внутренним сухожилиям, управляющим направлением движения руки.
Тестирование подводного осязания и захвата
Исследователи испытывали руку в танках со стоячей пресной водой, используя простые цилиндры, маленькие коробки и нерегулярные формы, такие как игрушечная морская звезда. В одном наборе испытаний рука оставалась неподвижной, пока объекты подводили под разными углами. Присоски корректно сообщали места контакта, а система управления выбирала соответствующие движения, например закручивание, когда объект лежал поперёк руки, или сгибание, когда он располагался сбоку. В других тестах рука медленно прочёсывала воду в поисковых движениях, пока присоски не почувствовали объект, затем останавливалась, определяла позу объекта и обворачивала его. Те же сенсорные сигналы можно было использовать даже для оценки кажущейся массы подвешенного предмета по силам натяжения на одной присоске. В многочисленных испытаниях рука успешно захватывала и поднимала несколько типов маленьких подводных объектов без внешнего управления.
Что это значит для будущих подводных роботов
Сочетая мягкие материалы, основанные на свете сенсоры осязания и многоуровневое локальное управление, эта рука, вдохновлённая осьминогом, демонстрирует, как роботы могут реагировать на окружение прямо в месте контакта, не ожидая решений удалённого компьютера. Работа указывает на то, что будущие подводные машины смогут безопаснее обследовать загромождённые, хрупкие или плохо изученные пространства, используя множество маленьких сенсорных и рефлекторных модулей, распределённых по телу. Хотя прототип в основном тестировали на относительно простых цилиндрических цельах, ту же конструкцию можно масштабировать и расширять на большее количество рук и присосок, приблизив роботов к естественной пластичности осьминога в море.
Цитирование: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
Ключевые слова: мягкая робототехника, подводный захват, дизайн, вдохновлённый осьминогом, тактильное датирование, автономная манипуляция